系统总体设计
本系统主要由三个模块构成分别是:图像采集模块,车牌识别模块和轨迹处理模块。
因为实验条件限制,所以实验时采用一个摄像头拍多个不同时间段的视频,代替多个摄像头的拍摄效果。右图中小矩形框代表小车,一大一小两个叠在一起的矩形代表摄像头,长长的大矩形框代表公路。
利用道路中行进车辆的成像镜头,对实时车辆的视频图像,运用视频分帧、图像处理、切割、物体提取等处理,实现对车辆车牌号的自动识别,与要查找的目标车牌号进行比较分析,找出目标车辆,并产生车辆信息。然后整合多个摄像头采集的车辆信息,绘制出车辆轨迹。

系统硬件设计
系统硬件主要由三个部分组成,分别是摄像头图像采集模块、树莓派图像处理平台和windows数据处理平台。每个模块在系统中扮演的角色各不相同,其中树莓派平台负责图像视频的采集和处理;而摄像头拍摄视频;windows数据处理平台负责图像数据的处理、整合和储存。

系统软件设计
首先利用树莓派自带Python3编写程序,调用CSI摄像头采集实时图像,并进行视频分帧。
然后在Windows上使用Python开发平台进行图像预处理、车牌识别、目标车辆车牌号与识别到的车牌号匹配、匹配成功则表示找到了目标车辆,保存车辆车牌号及时间地点信息,识别完成后,
把车辆信息按照时间先后顺序排序,并保存在TXT文件中,方便后面查阅,把安装有摄像头的地点用坐标表示出来,用key=地点,value=坐标的方式保存在字典中。并把地点信息作为键查询字典中的值,即坐标信息。判断值是否存在,若存在就取下一个元素中的地点信息,同样把地址信息作为键查询字典中的值,判断值是否存在,若存在就用直线连接两个地点的坐标,若不存在会提示不存在该地址。这样按照出现时间顺序连接坐标形成车辆的运动轨迹。






车牌识别模块:



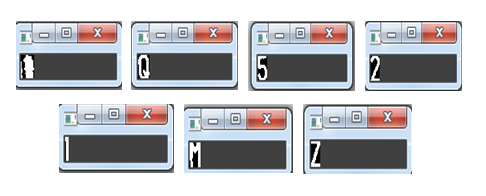
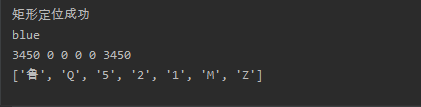

成果展示:
本文设计了一个基于机器视觉的车辆轨迹跟踪系统,在用Python编写完系统功能的之后,用Tkinter库设计出一个面向用户的车辆轨迹跟踪系统的界面,用来查询目标车辆的轨迹信息,并且在界面设计完成之后,把程序打包成一个exe文件,方便用户去使用,下面是一些成果展示图片:





毕设课题:基于机器视觉的车辆轨迹跟踪系统的设计
硬件:树莓派和win7系统(用树莓派自带的CSI摄像头拍摄车辆视频);
软件:Pycharm;
代码: OpenCV,Python;
车牌识别:用svm模板训练的,有训练样本(中文、字母、数字最少的200多张,多的有700多张,资源来源于网上,自己整理的,识别率百分之九十多。);
有完整代码;
有需要的联系QQ:2445761858。