Swin Transformer
1. 回顾 Transformer 和 ViT
要不就不回顾了吧,怪麻烦的。注意一下:
- Transformer 中,Encoder 是有 6 块的,但是输入输出并不改变尺寸。就是输入多大,输出就多大。这也是 Swin TRM 不一样的地方之一。(对应了下面的 1)
- ViT 虽然把 patch 当作一个个 token 进行输入,但是还是会有一个问题,就是如果图片太大的话,那 patch 就会变得很多,那对复杂度还是很不友好。这也是 Swin TRM 要改进的一个点。(对应了下面的 2)
Swin Transformer ( Swin TRM ) 做到了两点:
- 金字塔形状:在经过一个 Encoder 之后,会做一个 patch merging 的操作,也就是一个降采样的过程。增大了感受野,减小了分辨率。(不是 Encoder 让感受野变大的,是之后的 patch merging)
- 注意力机制放在一个窗口内部。
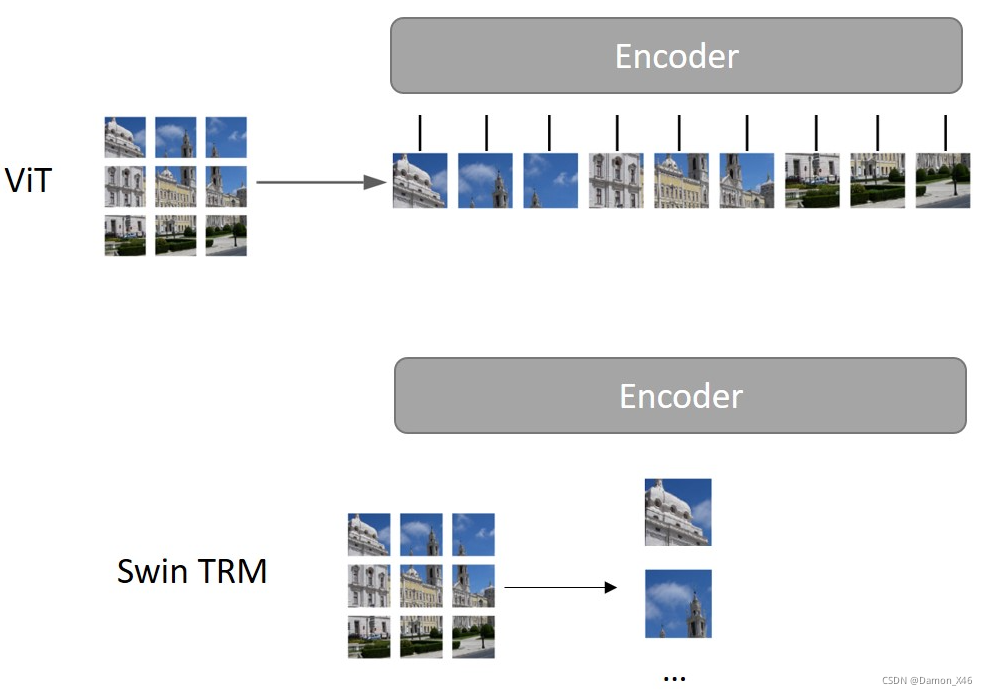
先提一嘴,这个窗口内部的注意力是什么?(假设一张图片分成 9 个 patch)
- ViT 是把 9 个 patch 一起输进去(一个 patch 当作一个 token),这样做的不就是整张图片的注意力嘛,但是图片太大,显然不可能一起输进去。
- Swin 是把一个个 patch 单独处理(每个 patch 里面的每个像素当作 token,当然每个像素指的不是一个值,而是
[
1
,
?
c
l
a
n
n
e
l
s
]
[1, \ clannels]
[1,?clannels])再输进去,这不就是 patch 内部的注意力嘛,把 9 个 patch 当作一个 batch,如果图片很多张的话,就可以把几张图片当成一个大 batch。
简单来说就是(从 TRM 到 Swin TRM):
- TRM 用来处理语言啊文字啊之类的,所以可以每个字当作一个 token 输入。
- ViT 如果也把每个像素当作一个 token 的话,太复杂,所以采用的是 patch 的形式。但是对于图片太大的话,那么分出来的 patch 还是太多,还是太复杂。
- Swin TRM 相当于又回到了一开始简单的那个想法,就是把一个个像素当作 token 来输入,因为 patch 很小,所以把像素当作 token 没关系。但是,这样就不能把整张图所有的 patch 一起输进去了, 就要用 patch 去组成 batch。
- (是有点绕啦,但是我听懂了,哈哈哈)
- 时刻注意 Swin TRM 是 patch 中的一个像素是一个 token,而 ViT 中,每个 patch 是一个 token。
2. Swin TRM
2.1. Swin TRM 整体架构
整体的结构如下图所示:
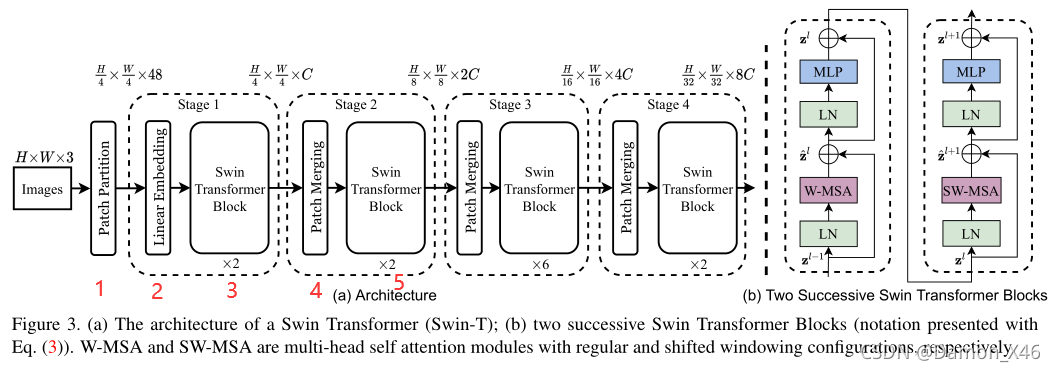
假设输入图像是
224
×
224
×
3
224 \times 224 \times 3
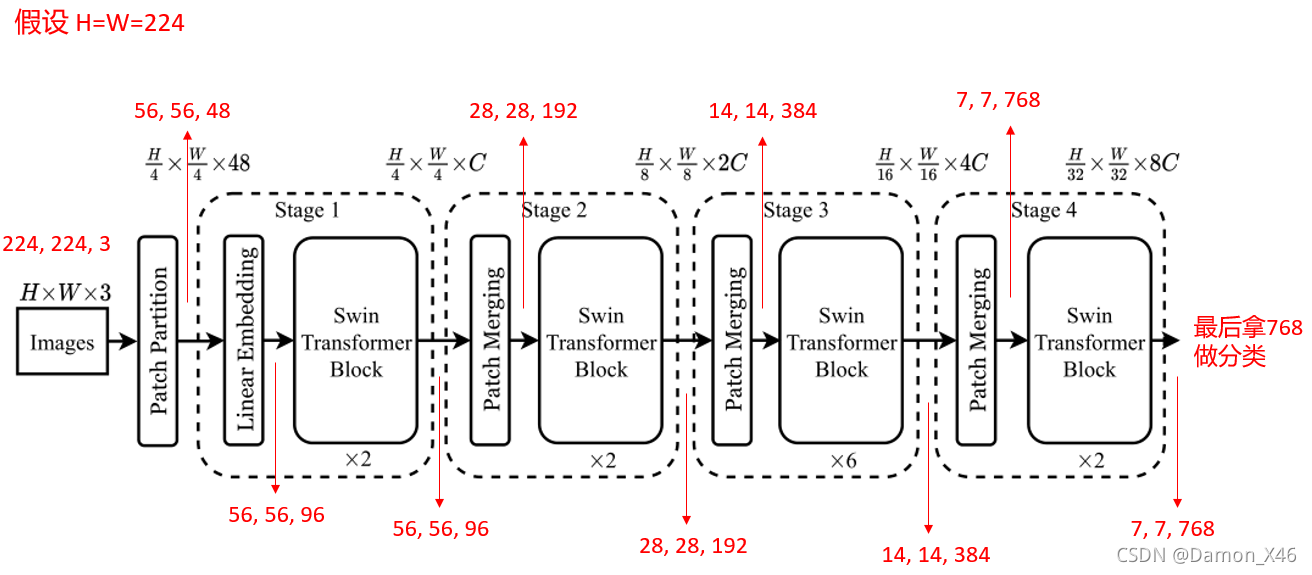
224×224×3,那么图中每个部分的输入输出为:
- 224 × 224 × 3 224 \times 224 \times 3 224×224×3 到 ( 224 ? / ? 4 ) × ( 224 ? / ? 4 ) × ( 4 × 4 × 3 ) (224\ /\ 4 ) \times (224\ /\ 4 ) \times (4 \times4\times3) (224?/?4)×(224?/?4)×(4×4×3)
- ( 224 ? / ? 4 ) × ( 224 ? / ? 4 ) × ( 4 × 4 × 3 ) (224\ /\ 4 ) \times (224\ /\ 4 ) \times (4 \times4\times3) (224?/?4)×(224?/?4)×(4×4×3) 到 ( 224 ? / ? 4 ) × ( 224 ? / ? 4 ) × 96 (224\ /\ 4 ) \times (224\ /\ 4 ) \times 96 (224?/?4)×(224?/?4)×96 (假设线性映射是映射到 96)
- ( 224 ? / ? 4 ) × ( 224 ? / ? 4 ) × 96 (224\ /\ 4 ) \times (224\ /\ 4 ) \times 96 (224?/?4)×(224?/?4)×96 到 ( 224 ? / ? 4 ) × ( 224 ? / ? 4 ) × 96 (224\ /\ 4 ) \times (224\ /\ 4 ) \times 96 (224?/?4)×(224?/?4)×96 (第三个这边下面有一个 × 2 \times2 ×2,说明是经过两个 block,就是上图右边的那两个 block,那两个其实是不一样的,是两个 Encoder。我们说过,TRM 的 Encoder 是不会改变形状的,所以经过这个之后形状是没有改变的。)
- ( 224 ? / ? 4 ) × ( 224 ? / ? 4 ) × 96 (224\ /\ 4 ) \times (224\ /\ 4 ) \times 96 (224?/?4)×(224?/?4)×96 到 ( 224 ? / ? 8 ) × ( 224 ? / ? 8 ) × ( 96 × 2 = 128 ) (224\ /\ 8 ) \times (224\ /\ 8 ) \times (96\times2=128) (224?/?8)×(224?/?8)×(96×2=128) (其实这边在下采样的时候是变成了 4,然后 4 再映射到 2 ,所以后面是 96 × 2 = 128 96\times2=128 96×2=128)
代码实现的时候,其实是下面这个图这么组装的:

2.2. 输入数据处理(框1)
假设图像是 (224, 224, 3),patch size 是 4,映射的维度是 96。那么第一个框框的操作就是(解决数据输入的问题):
- 先把 (224, 224, 3) 划分 patch,每个 patch 是 (4, 4, 3),所以有 3136 个 patch
- 然后把每个 patch 展平到 48( 4 × 4 × 3 4 \times4\times3 4×4×3)
- 然后把 48 做一个映射,映射到 96
2.3. 相对位置编码和注意力(框2)
Swin TRM 位置编码有两点不同:
- 加的位置不同,放在了 attention 矩阵中。(公式如下)
- 使用的是相对位置编码,而不是绝对位置信息
A t t e n t i o n ( Q , K , V ) = S o f t M a x ( Q K T / d + B ) V (1) Attention(Q,K,V)=SoftMax(QK^T/\sqrt{d}+B)V \tag{1} Attention(Q,K,V)=SoftMax(QKT/d?+B)V(1)
SoftMax 里面的这个东西的本质是计算每个字符对每个字符的相似性。所以这里面的形状应该是 [ s e q . l e n . × s e q . l e n . ] [seq.len.\times seq.len.] [seq.len.×seq.len.] 也就是说,相对位置编码的这个 B 矩阵,也是这个形状。
在图像这里,在 Swin TRM 这里,就是计算一个 patch 里面,像素跟像素之间的相似性,假设现在一个 patch 的大小是 7 × 7 7\times7 7×7 那么这个 B 矩阵的维度就应该是 49 × 49 49\times49 49×49,而不是 7 × 7 7\times7 7×7(因为 7 × 7 7\times7 7×7 的 patch 里面有 49 个像素呀,计算像素之间的相似性,那这个矩阵就是 49 × 49 49\times49 49×49)。
重点哦!!!现在已经知道 B 的形状是什么了,接下来就是了解 B 里面的内容是怎么来的!
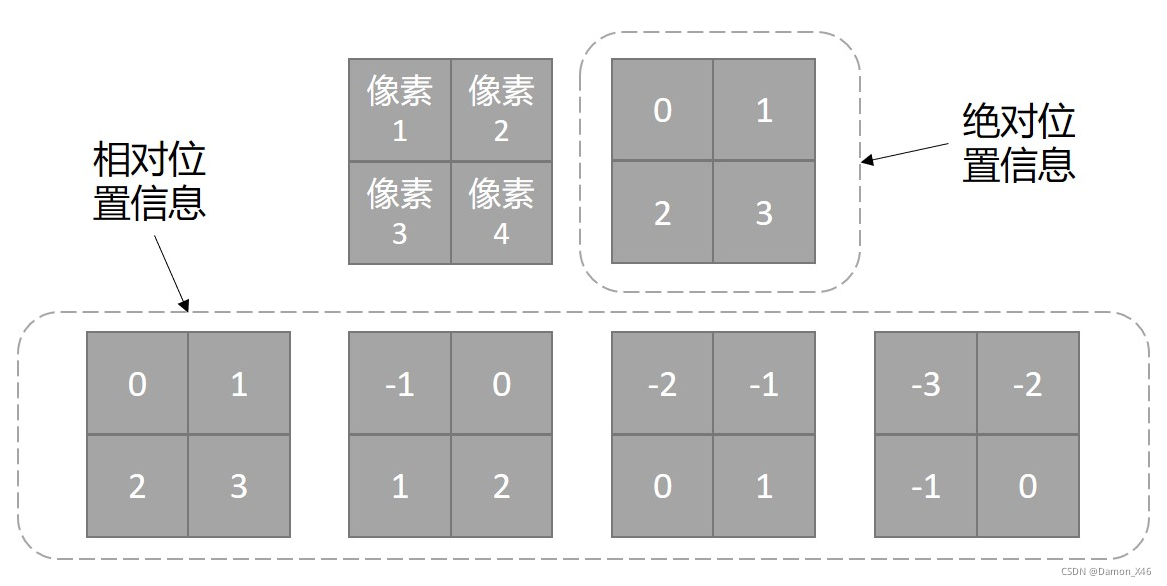
2.3.1. 绝对位置信息和相对位置信息
- 绝对位置信息,就是原点没有动。(下图的第一条,(0, 1, 2))
- 相对位置信息,就是原点动了。(下图三种,(0, 1, 2), (-1, 0, 1), (-2, -1, 0))
- 而且这里定义的是向右为正,如果规定向左为正,那又是另一种情况。
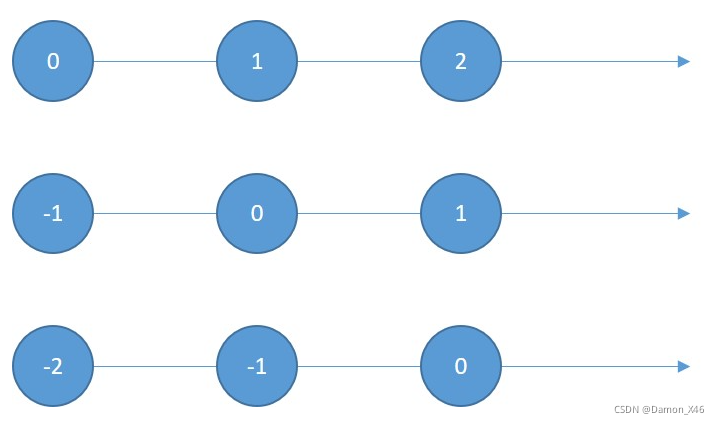
网格的情况见下:
那么问题来了,怎么把相对位置信息融入到 Attention 中??
2.3.2. 把相对位置信息融入 Attention 矩阵中
接下来还是用假设的方法来解释,先把 Attention 公式再拿下来看一眼:
A
t
t
e
n
t
i
o
n
(
Q
,
K
,
V
)
=
S
o
f
t
M
a
x
(
Q
K
T
/
d
+
B
)
V
(2)
Attention(Q,K,V)=SoftMax(QK^T/\sqrt{d}+B)V \tag{2}
Attention(Q,K,V)=SoftMax(QKT/d?+B)V(2)
用2.3.1. 中的 4 个像素来举例。前面分析过了,4 个像素,B 矩阵的形状就应该是
4
×
4
4\times4
4×4,
Q
K
T
/
d
QK^T/\sqrt{d}
QKT/d? 的形状跟 B 是一样的,也是
4
×
4
4\times4
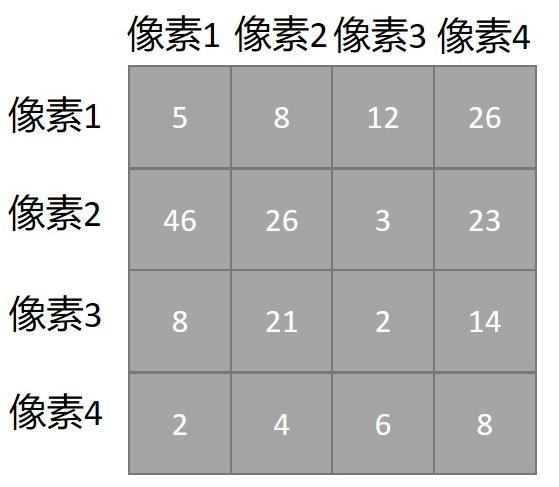
4×4。我们再假设
Q
K
T
/
d
QK^T/\sqrt{d}
QKT/d? 的值如下所示:
现在的问题就是怎么把上面的 4 个相对位置信息融入到这个 Attention 矩阵中!
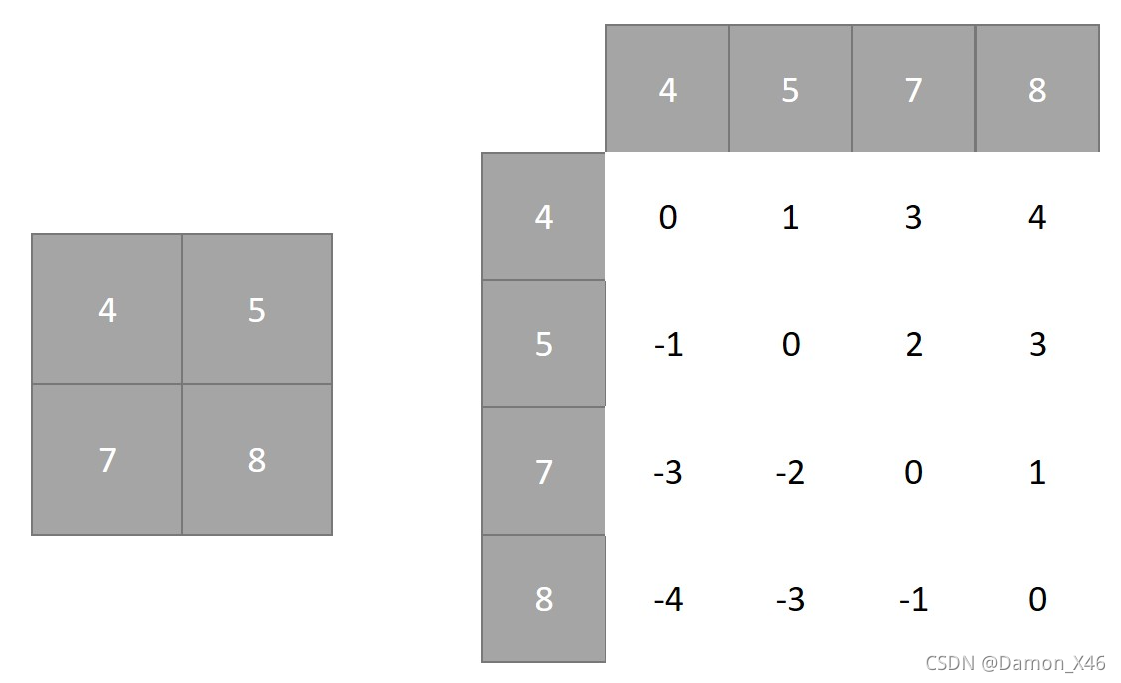
我们把第一行看作是以1为原点,以此类推,不就可以把相对位置矩阵融入进去了吗?如下图:
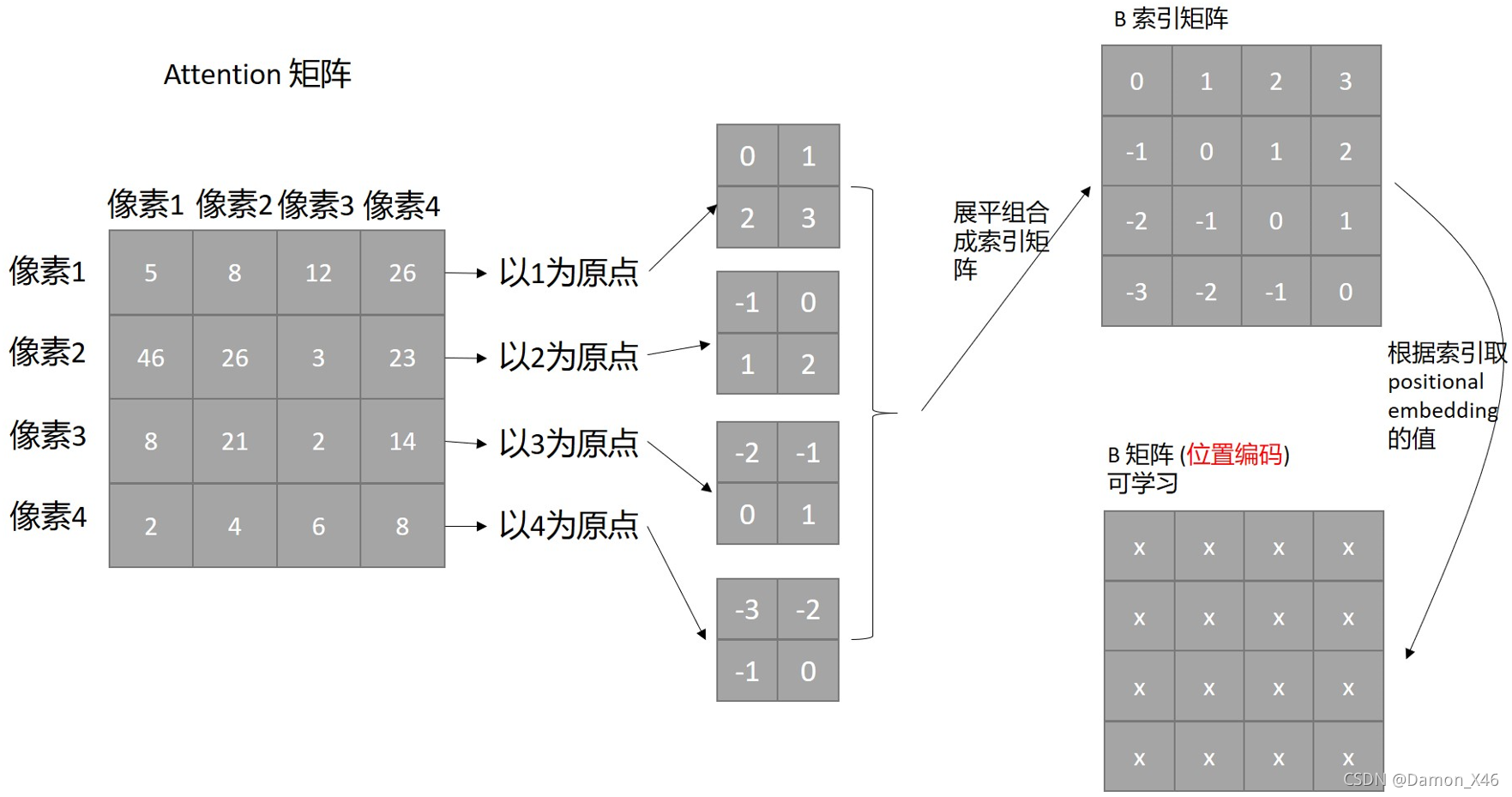
梳理一下:
- 我们现在 4 个像素,有 4 个相对位置的情况
- 4 个情况的相对位置可以展平拼接成一个 4 × 4 4\times4 4×4 的索引矩阵
- QK 做完操作之后有一个 4 × 4 4\times4 4×4 的 Attention 矩阵
- 会初始化一个可以学习的 4 × 4 4\times4 4×4 位置编码矩阵
- 用索引矩阵去位置编码矩阵中取每个像素的位置编码,与 Attention 相应位置的相加
- 这样就能得到最终的 Attention 矩阵
- 然后再 SoftMax,再和 V 加权
- 这样整个 注意力操作就完成了
当然,上面这个只是举例,实际上,Swin TRM 的操作是下面这个图:

其实是一样的,只不过他用的是两个值,稍微复杂了一点而已。
那他用这两个值怎么取索引?很简单的思路就是把这两个值加起来当作索引矩阵再去取值的。(例如上面第一行就会变成 (0, 1, 1, 2))
但是,这样会有两个问题:
- 有负数
- 第一行第二个跟第一行第三个,相对位置信息肯定是不一样的,但是加起来的索引是一样的,取到的值是一样的
所以要进行改进的两个点:
- 不能有负数
- 不同位置的相对位置信息不能相同
改进的方法(如下图):
- 加一个 M ? 1 M-1 M?1 ,让他没有负数
- 在 0 维度上 × 2 M ? 1 \times2M-1 ×2M?1 就不一样了
下面的流程就很容易懂了:

然后这个就是相对位置信息了。也就是所谓的 positional embedding。把这玩意儿再加到 Attention 中就可以了。
2.4. 移动窗口注意力机制(框2 & 图(b))
由上分析可知:目前为止 (严谨吧),Swin TRM 的注意力只是局部的,只在一个个 patch 之内,缺少交互。所以,这也是 Swin TRM 的改进之一,就是使用了移动窗口注意力。
- 假设,图片大小是 56 × 56 56\times56 56×56 ,patch 的大小是 7 × 7 7\times7 7×7 ,移动了 3 3 3 个像素
- 移动的方法是把图像上面三行的像素放到最下面,左边三列的像素放到最右边。组成一张新的图像
- 这样新图像跟原来的图像在大部分位置就有 3 3 3 个位置的偏差。(说的不准确,但是可以这么理解)
- 示意图可以见下面这个,方便描述。

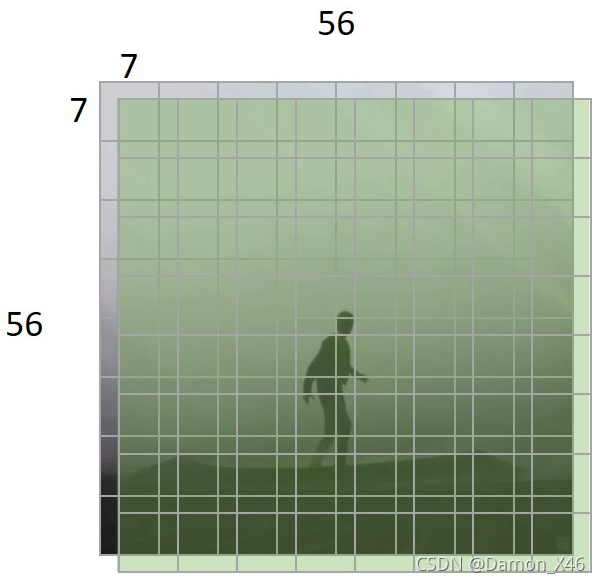
- 就大概像上图这个意思。我们看第一个 patch,灰色的是原图的,绿色的是移动之后的
- 可以看到移动之后的窗口相对于原来的窗口,会跟相邻的三个窗口有重叠,这样在做注意力的时候,就会对相邻的三个窗口内的部分信息一起做注意力。就不会是原来单张图片只在自己 patch 内做注意力这么局限了。
- 这个就是那两个 block,还记得吗,很上面的那张图,划分阶段的那个 ~
但是,问题来了。我们把上面三行跟左边三列的像素分别拿到下面跟右边。窗口大小为 7 的话,最下面跟最右边在对 patch 做操作的时候,就会把原本不相邻的 patch 去做操作。也就是说,本来就不相关的,没有语义联系的几个部分在这里会被计算相关性。首先是没有意义,其次就是会导致网络学习错误的东西。(如下图 1 跟 2,3 跟 6 ,4578,去做 Attention 是不是很不合理,本不相邻)
那么要怎么办呢?下面画出示意图并解释。

- 这边标索引,可以告诉模型,窗口看到的哪些是相邻的,哪些是不相邻的
- 也就是用 masked 的方法
- 往下看就知道了,直接拿右下角那个都不相邻的 7 × 7 7\times7 7×7 窗口来举例

像素点比较多,所以下面,直接把相同的弄在一起来举例
- 如上图所示,拿来相减
- 0 的位置就代表是相邻的位置
- 非 0 的就代表本来没有相邻,但是被框到一起了
- 那么就可以把 0 的部分置 0,把非 0 的部分置为 ? ∞ - \infty ?∞,或者 ? 1000 -1000 ?1000, ? 100 -100 ?100
- 然后再把这个矩阵加到 Attention 矩阵中,这样,不相邻的就 ? - ? 很大,那就没有影响或者说影响很小了。(记得 Attention 矩阵吧,值都不是很大)
- 当然这边只是拿的 4 个块合起来举例的,实际上,我们最后面那个是 7 × 7 7\times7 7×7 大小的窗口,展开再相减得到的就是 49 × 49 49 \times49 49×49 的矩阵,不就是刚好和 Attention 矩阵的维度一样嘛。(闲着没事干的,可以把上面那个 7 × 7 7\times7 7×7 的矩阵展开看看)
- 一切如此完美 ~
2.5. patch merging
- 把原来的特征图,隔两行,隔两列取样
- 这样得到的就是 4 份原来特征图一半大小的新的特征图
- 然后再用一个 linear 层,把 4 映射成 2
- 所以可以看到上面那个网络结构图的 C C C 经过一个 patch merging 都是两倍在增长的