首先从各个角度对棋盘格进行拍照,约20-25张图片。?
MATLAB调用摄像头连续拍照并保存_Smith Eric的博客-CSDN博客![]() https://blog.csdn.net/qq_39642029/article/details/121621127?spm=1001.2014.3001.5501
https://blog.csdn.net/qq_39642029/article/details/121621127?spm=1001.2014.3001.5501
Camera Calibration Toolbox for Matlab![]() http://www.vision.caltech.edu/bouguetj/calib_doc/download/index.html首先上述下载工具箱,然后启动gui界面:
http://www.vision.caltech.edu/bouguetj/calib_doc/download/index.html首先上述下载工具箱,然后启动gui界面:
calib_gui启动界面如下:?

?Step1:读取照片,Image names。
? ? ? ? 按照提示操作,这里图片最好不要直接保存成数字名称。加个前缀,比如pic, 就是pic1,pic2...
Basename camera calibration images (without number nor suffix): ?这里就可以直接输入pic, 然后输入图片格式,这里为Jpg,所以输入j。之后就会自动读取pic1-25。
?Step2:提取角点,Extract grid corners。

按照上图中顺序标点,标完一张就Enter,一直到所有标完。结束后会自动保存出如下.mat文件。
![]()
??Step3:标定,?Calibration。
? ? ? ? 会默认使用step2中的数据文件,得到结果如下。
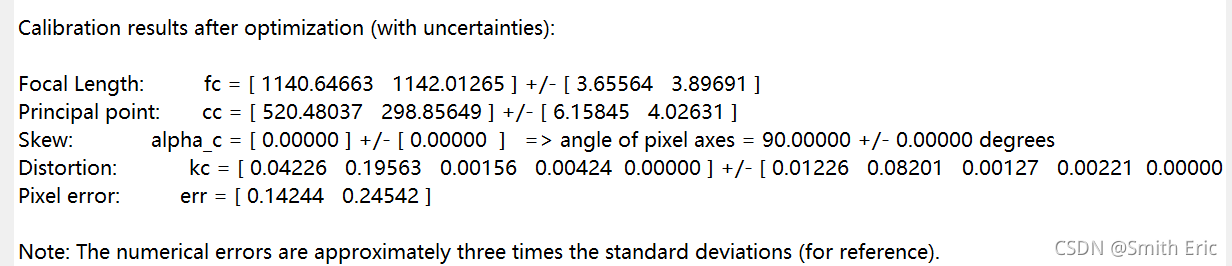
?标定结果分为优化前后的两个结果。
Step4:查看,show extrinsic。

Step5:去畸变,Undistort image。
? ? ? ? 将图片去除畸变并保存在文件夹中。
Step6:保存,save。?
![]()
以上计算结果就是本摄像头的标定结果。
?