БОЯЕСаВЉПЭАќРЈ6ИізЈРИ,ЗжБ№ЮЊ:ЁЖздЖЏМнЪЛММЪѕИХРРЁЗЁЂЁЖздЖЏМнЪЛЦћГЕЦНЬЈММЪѕЛљДЁЁЗЁЂЁЖздЖЏМнЪЛЦћГЕЖЈЮЛММЪѕЁЗЁЂЁЖздЖЏМнЪЛЦћГЕЛЗОГИажЊЁЗЁЂЁЖздЖЏМнЪЛЦћГЕОіВпгыПижЦЁЗЁЂЁЖздЖЏМнЪЛЯЕЭГЩшМЦМАгІгУЁЗ,БЪепВЛЪЧздЖЏМнЪЛСьгђЕФзЈМв,жЛЪЧвЛИідкЬНЫїздЖЏМнЪЛТЗЩЯЕФаЁАз,ДЫЯЕСаДдЪщЩаЮДдФЖСЭъ,вВЪЧБпдФЖСБпзмНсБпЫМПМ,ЛЖгИїЮЛаЁЛяАщ,ИїЮЛДѓХЃУЧдкЦРТлЧјИјГіНЈвщ,АяБЪепетИіаЁАзЬєГіДэЮѓ,аЛаЛ!
ДЫзЈРИЪЧЙигкЁЖздЖЏМнЪЛММЪѕИХРРЁЗЪщМЎЕФБЪМЧЁЃ
1.ApolloЦНЬЈИХЪі
1.1 ApolloЦНЬЈЗЂеЙРњГЬ
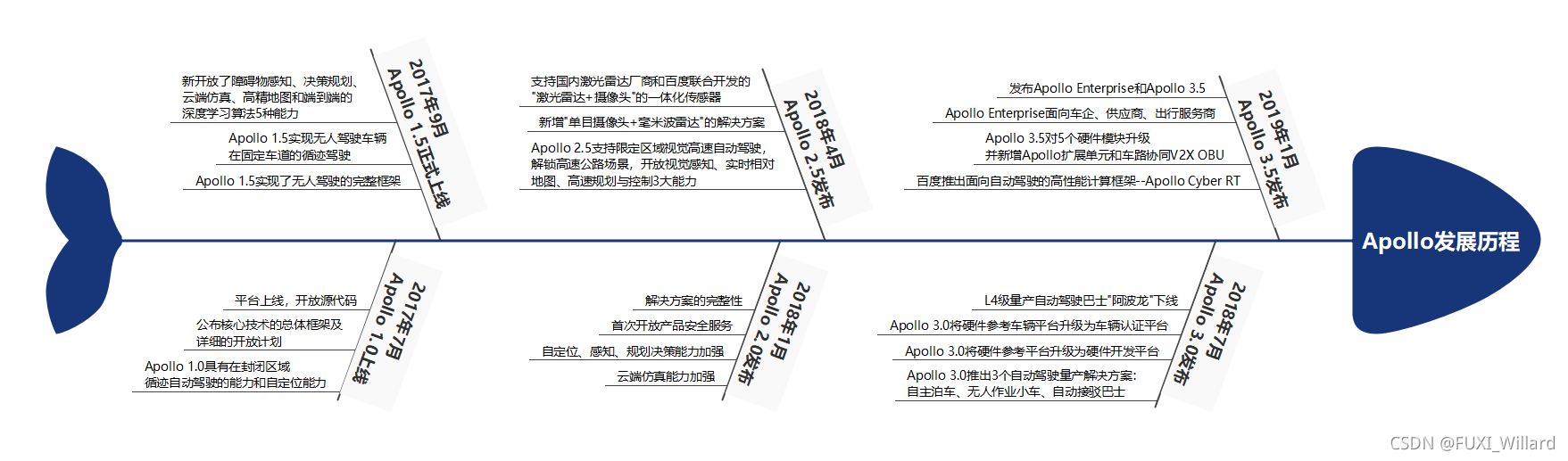
- 2017Фъ7дТ,АйЖШAIПЊЗЂепДѓЛсЩЯ,АйЖШЪзЯЏдЫгЊЙйТНЦцаћВМApollo 1.0ПЊЗХЦНЬЈЩЯЯп,ПЊЗХдДДњТы,ЙЋВМСЫApolloМЦЛЎКЫаФММЪѕЕФзмЬхММЪѕПђМмМАЯъЯИЕФПЊЗХМЦЛЎ;ApolloЪЧвЛИіПЊЗХКЭЭъећЦНЬЈ,ПЩвдАяжњЦћГЕаавЕМАздЖЏМнЪЛСьгђЕФКЯзїЛяАщећКЯздЩэЕФГЕСОКЭгВМўЯЕЭГ,ПьЫйДюНЈвЛЬзЪєгкздМКЕФздЖЏМнЪЛЯЕЭГ;Apollo 1.0АцБООпгадкЗтБеЧјгђбМЃздЖЏМнЪЛЕФФмСІКЭздЖЈЮЛЕФФмСІ;
- 2017Фъ9дТ,Apollo 1.5АцБОе§ЪНЩЯЯп;1.5АцБОаТПЊЗХСЫеЯАЮяИажЊ,ОіВпЙцЛЎ,дЦЖЫЗТец,ИпОЋЕиЭМКЭЖЫЕНЖЫЕФЩюЖШбЇЯАЫуЗЈет5жжФмСІ;
- 2018Фъ1дТ,АйЖШдкРЫЙЮЌМгЫЙЕФCES(International Consumer Electronics Show,ЙњМЪЯћЗбЕчзгВњЦЗеЙ)ДѓЛсЩЯе§ЪНЗЂВМApollo 2.0;Apollo 2.0ЕФ4ИіЩ§МЖ:
- НтОіЗНАИЕФЭъећад:Apollo 2.0жЇГжжчвЙМђЕЅГЧЪаЕРТЗЧщПіЯТЕФздЖЏМнЪЛ,АќРЈ:дЦЖЫЗўЮёЁЂШэМўЦНЬЈЁЂВЮПМгВМўЁЂВЮПМГЕСОЦНЬЈдкФкЕФ4ИіФЃПщШЋВППЊЗХ;
- ЪзДЮПЊЗХВњЦЗАВШЋЗўЮё:Apollo 2.0ЭЈЙ§дЦЖЫЕФАВШЋOTAЁЂЯЕЭГВуМЖЕФЗРЛ№ЧНМАгВМўВуМЖЕФКкКазгет3ИіЗНУцРДБЃеЯЯЕЭГЕФАВШЋдЫаа;
- здЖЈЮЛЁЂИажЊЁЂЙцЛЎОіВпФмСІМгЧП:Apollo 2.0ЪЕЯжСЫЖдКьТЬЕЦЕФгааЇЪЖБ№,аТдіЕФБфЕРЙІФмЛсИљОнТЗПіНјаазджїХаЖЯ,ЙцЛЎГЕСОНјвЛВНЕФЖЏзї;
- дЦЖЫЗТецФмСІМгЧП:дкApollo 1.5ЩЯашвЊЛЈЗб30minЕФЗТецВтЪд,дкApollo 2.0ЩЯжЛашвЊ30s,МѕЧсСЫЦНЬЈВтЪдепЕФЙЄзїСП;
- 2018Фъ4дТ,АйЖШе§ЪНЗЂВМApollo 2.5АцБО,ЮЇШЦГЁОАЁЂГЩБОЁЂГЕаЭЁЂадФмЕШЮЌЖШНјааЖрЯюЩ§МЖ;
- аТдіжЇГжЙњФкМЄЙтРзДяГЇЩЬКЭАйЖШСЊКЯПЊЗЂЕФ"МЄЙтРзДя+ЩуЯёЭЗ"ЕФвЛЬхЛЏДЋИаЦї,ПЊЗЂепЮоаыдйЪЙгУЙњЭтАКЙѓЕФМЄЙтРзДяВњЦЗ;
- аТді"ЕЅФПЙуНЧЩуЯёЭЗ+КСУзВЈРзДя"ЕФНтОіЗНАИ,ЭЈЙ§ЛљгкЩуЯёЭЗЕФЪгОѕИажЊЗНАИ,ЪЙДЋИаЦїГЩБОНЯжЎЧАНЕЕЭ90%;
- Apollo 2.5АцБОжЇГжЯоЖЈЧјгђЪгОѕИпЫйздЖЏМнЪЛ,НтЫјИпЫйЙЋТЗГЁОА,ВЂПЊЗХЪгОѕИажЊЁЂЪЕЪБЯрЖдЕиЭМЁЂИпЫйЙцЛЎгыПижЦ3ДѓФмСІ;
- 2018Фъ7дТ,АйЖШдкAIПЊЗЂепДѓЛсЩЯе§ЪНЗЂВМApollo 3.0;АйЖШДДЪМШЫРюбхКъаћВМ,L4МЖЕФСПВњздЖЏМнЪЛАЭЪП"АЂВЈСњ"е§ЪНЯТЯп;
- Apollo 3.0НЋгВМўВЮПМГЕСОЦНЬЈЩ§МЖЮЊГЕСОШЯжЄЦНЬЈ;
- Apollo 3.0НЋгВМўВЮПМЦНЬЈЩ§МЖЮЊгВМўПЊЗЂЦНЬЈ,ВЂЗЂВМApolloДЋИаЦїЕЅдЊ,жЇГжРзДяЁЂЩуЯёЭЗЁЂМЄЙтРзДяЁЂGNSSЁЂIMUЕШЩшБИНгШы,ЪЙЕУЖрДЋИаЦїШкКЯИќМгШнвзЪЕЯж;
- Apollo 3.0ЭЦГі3ИіздЖЏМнЪЛСПВњНтОіЗНАИ,ЗжБ№ЮЊ:зджїВДГЕЁЂЮоШЫзївЕаЁГЕКЭздЖЏНгВЕАЭЪП;
- 2019Фъ1дТ,АйЖШдкCESДѓЛсЩЯе§ЪНЗЂВМApollo EnterpriseКЭApollo 3.5;
- Apollo Enterprise(Apollo ЦѓвЕАц)ЖЈвхЮЊ:здЖЏМнЪЛКЭГЕСЊЭјСьгђЕФЩЬвЕНтОіЗНАИ;жївЊУцЯђГЕЦѓЁЂЙЉгІЩЬКЭГіааЗўЮёЩЬ,АяЦфЪЕЯжжЧФмЛЏЁЂЭјСЊЛЏЁЂЙВЯэЛЏ,ЬсЙЉСПВњЁЂЖЈжЦЁЂАВШЋЕФздЖЏМнЪЛКЭГЕСЊЭјНтОіЗНАИ;
- Apollo 3.5АцБО,здЖЏМнЪЛЯЕЭГЕФЙцЛЎЁЂдЄВтЁЂИажЊКЭЖЈЮЛЕШжївЊФЃПщЕУЕНЩ§МЖ;дкгВМўЗНУц,Apollo 3.5ЖдЯжгаЕФ5ИігВМўФЃПщНјааИќаТ,АќРЈ:МЦЫуЕЅдЊЁЂGPS/IMUЕМКНЯЕЭГЁЂЩуЯёЭЗЁЂРзДяКЭМЄЙтРзДя;ЭЌЪБаТдіСЫСНИігВМўФЃПщ:ApolloРЉеЙЕЅдЊКЭГЕТЗаЭЌV2X OBU;
- АйЖШЛЙЭЦГіСЫвЛИіШЋаТУцЯђздЖЏМнЪЛЕФИпадФмПЊдДМЦЫуПђМмЈCApollo Cyber RT;
1.2 ApolloЦНЬЈММЪѕПђМм
ApolloММЪѕПђМмгЩ:ВЮПМГЕСОЦНЬЈ(Reference Vehicle Platform)ЁЂВЮПМгВМўЦНЬЈ(Reference Hardware Platform)ЁЂПЊЗХШэМўЦНЬЈ(Open Software Platform)ЁЂдЦЗўЮёЦНЬЈ(Cloud Service Platform)ЙЙГЩ;
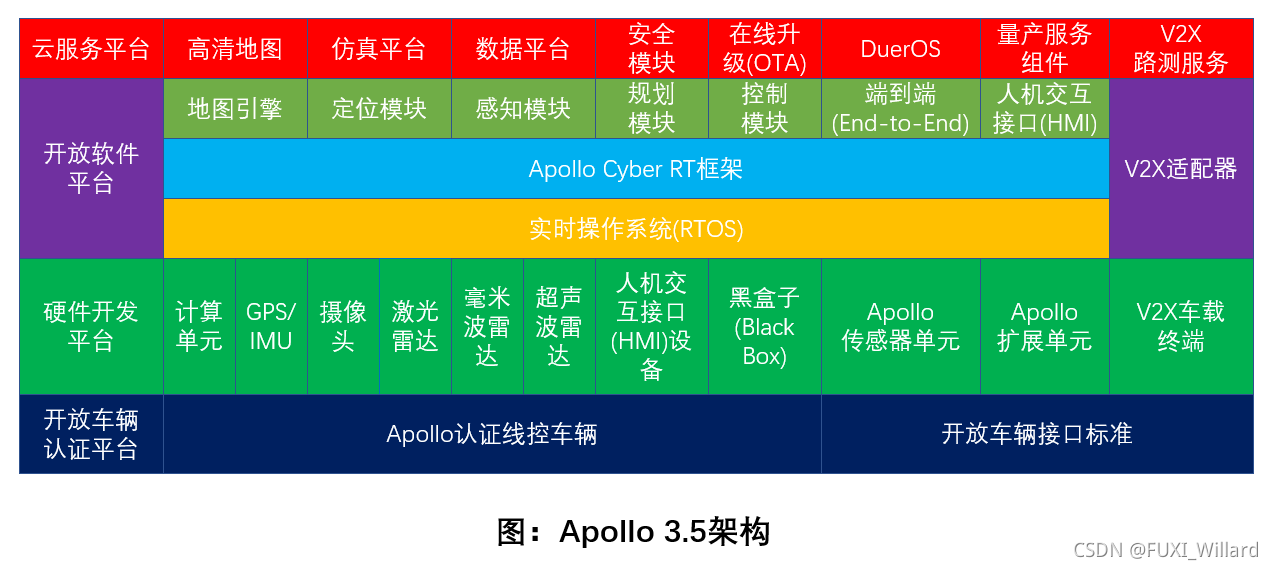
- ВЮПМГЕСОЦНЬЈЁЃ
ВЮПМГЕСОЦНЬЈжИ:вЛСОФмЙЛЪмЕчзгаХКХПижЦ,ОгЩАйЖШШЯжЄЕФЭъећГЫгУГЕ;ЯжНзЖЮгыApolloЦНЬЈМцШнЕФПЊЗХГЕаЭ:СжПЯMKZГЕаЭЁЂPolaris GEMГЕаЭЁЂЙуЦћGE3ГЕаЭЁЂГЄГЧWEY VV6ГЕаЭ; - ВЮПМгВМўЦНЬЈЁЃ
ВЮПМгВМўЦНЬЈАќРЈ:МЦЫуЕЅдЊЁЂGNSS/IMUЁЂЩуЯёЭЗЁЂМЄЙтРзДяЁЂКСУзВЈРзДяЁЂШЫЛњНЛЛЅЩшБИЁЂBlackBoxЕШгВМў; - ПЊЗХШэМўЦНЬЈЁЃ
ПЊЗХШэМўЦНЬЈАќРЈ:ЪЕЪБВйзїЯЕЭГЁЂГадиЫљгаФЃПщЕФПђМмВуЁЂИпОЋЕиЭМгыЖЈЮЛФЃПщЁЂИажЊФЃПщЁЂОіВпЙцЛЎФЃПщМАПижЦФЃПщ; - дЦЗўЮёЦНЬЈЁЃ
дЦЗўЮёЦНЬЈАќРЈ:ИпОЋЕиЭМЁЂФЃФтМнЪЛЕФЗТецЗўЮёЁЂЪ§ОнЦНЬЈЁЂАВШЋКЭOTAЗўЮёЕШ;
зЂ:вдЩЯЦНЬЈдкДЫНізіМђЕЅНщЩм,ЯъЯИЧыВщдФЖдгІеТНкЁЃ