? ? ? ? �������˼�ʻ����������,�߾���ͼҲ��֮��չ����,����˵�߾���ͼ��Ϊ���˼�ʻ������,���˼�ʻ�����ĵ��ȡ���֪����λ�����ߡ��滮�����Ƶȶ���ʹ�õ��߾���ͼ����ô�߾���ͼ������ʲô��?
? ? ? ?Ϊ�˽��ܸ߾���ͼ,��������һ�µ�ͼ�ķ�չ��ʷ��
? ? ? ?��һ����ͼ:ֽ���ͼ
? ? ? ?���ϵĵ�ͼ���ǾͲ������о���,�����DZȽ�ңԶ,����������һ�µ�ͼ�Ľ���ʷ����ֽ���ͼ���ڵ����豸���������ʱ����,ֽ���ͼռ������Ҫ��ͳ�ε�λ,�ܶ�칫�ҡ����ﶼ����ŵ�ͼ,ȥ���Ҳ��ñ�һ�ŵ��صĵ�ͼ��ֽ���ͼ���ڱȽ϶������,����,ֽ���ͼ������,����������������˱仯,��ͼ��ʵ�ʵĵط��ͶԲ��Ϻ���;����һ��������,���Dz���֪���Լ��ڵ�ͼ�ϵ�ʵʱλ��,����Ϥ�ĵط����Կ��������ж�,�ڲ���Ϥ�ĵط���ֻ������˴�����

? ? ?�ڶ�����ͼ:���ӵ�����ͼ
? ? ? ���ӵ�����ͼ�Ѿ���ֽ��ı�Ϊ���Ӱ�ġ����ӵ�����ͼ�ij��ַ�ʽ��Ҫ��2Dƽ���ͼ,�����ʼ�ĵ�����ʹ�õĵ�ͼ,��ʹ��ʱ��Ҫ�������еĵ�ͼ������������������,·���滮ͨ������оƬ���м����ó�������������A����B���г�,���Ǽ���������ֻ�ῼ�Ǿ����Լ���·����(������ʡ������·���շѸ��ٵ�)�����ʱ���ĵ�����û����������,���Ե�ͼû���Զ�����,��Ҫ�ֶ����ص�ͼ���и���;�ŵ�����������֪�������ڵ�ͼ��ʲôλ����,��Ȼ�е�ʱ��̫;���������Ȼ���Թ滮·��,���ǹ滮�㷨�Ƚ����,������ʱ���滮���Ƚϲ��·�������߲�ͨ��·����

? ? ? ? ��������ͼ:���ܵ�����ͼ
? ? ? ? ֮���Խ���һ���ĵ�ͼ��֮Ϊ���ܵ�����ͼ,����Ϊ��һ���ĵ�ͼ��Ҫ�������豸��ʹ��,�������ֻ���ƽ����Եȡ���һ���ĵ�ͼ��������Ӳ���豸,���DZȽ�ͨ�õ�app,��װ��֮�E���豸�ϾͿ���ʹ��,�������ݿ�ʼ����,��������������ݺ��Ƽ��㡣ͬ����A��ǰ��B��,���������ǵ�����Խ��Խ��,��·�Ƿ�ӵ�¡�ѡ����̾��뻹��ʱ����̵�·��,�����俼����Χ֮�ڡ��������ŵ�ͼ���ȵ�����,��ͨ��������ʱ,�������ᵯ����·ͼ�������·�ߡ�

?? ? ? ? ���Ĵ���ͼ:�߾���ͼ
? ? ? ? �߾���ͼ,����˼���Ǿ��Ⱥܸߵĵ�ͼ,����Ϊ���˼�ʻ�����ġ�Ŀǰ�����������۵ij������䱸�����Զ���ʻ���ܴ����L2�����,Ҳ���䱸L3����ġ�����������ɳ�ͷǰ�õ�����ͷ�ͺ��ײ��״���ȷ�ϳ�����ǰ���Ŀ�ͨ���������Ƿ��г���,����г���,���ڰ�ȫ�ƶ������ڸ���,���û�г���,����ٵ����õ�ѭ���ٶȡ��䱸L3����ij��������ʵ���ض��������ȫ�Զ���ʻ,����ʵ�ֱ������������Ϊ����Щ��������������ͨ��ͼ����ʵ�ֵ�,�Ͼ�Ŀǰ��ʹ�õĵ�ͼ���꾫�ȴ�Լ��5-10������,�ﲻ���Զ���ʻ��Ҫ��
? ? ? ? ���Ǹ߾���ͼ�ľ��Ծ���һ�㶼��������,�Ըߵµ�ͼΪ��,���Ծ��ȿ��Դﵽ10��������,���Һ������Ծ���������Ҫ���ߡ��߾���ͼ�����и߾��ȵ�����,ͬʱ����ȷ�ĵ�·��״,����ÿ���������¶ȡ����ʡ����߳�,���������Ҳ���������ڡ�
? ? ? ? ����Ը߾���ͼ�����˼���,����������������һ�³��õĸ߾���ͼ��ʽ��
OpenDRIVE�߾���ͼ
? ? ? ? OpenDRIVE��Ŀǰ�����Ͻ�ͨ�õ�һ�ָ�ʽ�淶,��һ�ҵ¹���˾�ƶ���
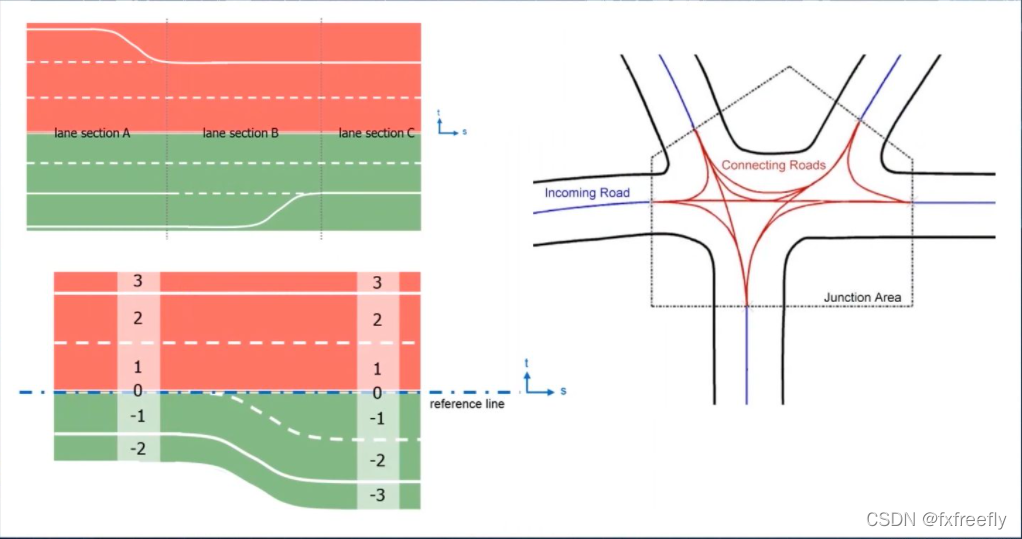
? ? ? ? ������OpenDRIVE��ʽ�淶������·ʱ,���漰Section��Lane��Junction��Tracking�ĸ����
? ? ? ? ���۳����߱��ٻ���,���Ǵ��м�Ļ����з֡��з�֮��ĵ�ͼ��ΪSection A��Section B��Section C�����֡�һ����·���Ա��з�Ϊ�ܶ��Section�����յ�·���������仯����·ʵ�ߺ����ߵı仯����·���Եı仯��ԭ�����Ե�·�����з֡�
? ? ? ? ?�ڵڶ���Lane������,Reference Line��OpenDRIVE�淶�зdz���Ҫ��û��Reference Line,����˵һ���ɡ�����Reference Line,�����ʾID�������,���ұ�ʾID���ҵݼ�,���Ǹ�ʽ�淶�ı�֮һ,ͬʱҲ�ǹ̶��ġ����ɸ��ĵġ�����,Reference Line��IDΪ0,������1��2��3,������?1��?2��?3��
? ? ? ? Junction��OpenDRIVE��ʽ�淶�е�·�ڸ��Junction�а�������·,����·�������ӿ�ͨ�з���,�ú�ɫ��������ʾ����һ�ŵ�ͼ��,��������·�ڵı���ʱ,��Ȼ˵·��û����,������Ҫ�������������ӵ�·�Ŀ�ͨ�з�����,�Ա����˼�ʻ������ȷ�н�·�ߡ�
? ? ? ? ��������������OpenDRIVE��ʽ�淶��,�ǻ���Reference Line������Ӧ��,���л���Reference Line��ƫ���������µ�Ӧ��,����ʮ����Ҫ��һ���������Tracking��Tracking������ϵ��ST,S��������Reference Line����ƫ����,T��������Reference Line�ĺ���ƫ������ǰ���������,�����Ǻ���ġ�
? ? ? ? ��OpenDRIVE��,���жԳ����ߵ�����������Reference Line��ƫ����������,������������߱�ʾ��Reference Line,���������������ǻ�������ƫ�ơ���������߿���ͨ������������,���������糵�������ҵ��¶�,Ҳ����ͨ��һ������Reference Lineƫ�Ƶķ�����������������ʽ�dz�����,��ʵ�ʲ������������ء�
Apollo�߾���ͼ
? ? ? ? Apollo�ĸ߾���ͼ������OpenDrive��ʽ��������OpenDrive�����Ͻ�������,ʹ��ͼ��ʽ������Ӧ���˼�ʻ,Apollo�߾���ͼ�����OpenDrive�߾���ͼ�IJ�����±���ʾ��
| ��Ҫ���� | ��OpenDrive | Apollo |
| Ӧ�ó��� | ��Ҫ���ڷ��泡�� | ��Ҫ�������˼�ʻ���� |
| Ԫ�ر�����ʽ | ʹ�����߷��̺ͻ��ڲο��ߵ�ƫ������������״ | ʹ�þ���������������Ԫ����״ |
| Ԫ�طḻ�� | �ṩ������Ԫ������,��:��·������㡢�źźͶ��� | ϸ��Ԫ�ر��ﲢ�ḻԪ�����ԡ��������µĽ�ֹͣ���������к�������ٴ���ͣ���ߡ�����ͣ����־�����м��ٱ�־�� |
| ����Ӧ���˼�ʻ�㷨 | ������ | ���ϰٶȵ����˼�ʻ����,��������˼�ʻ�㷨�Ŀ����ԺͿɿ��� |
NDS�߾���ͼ
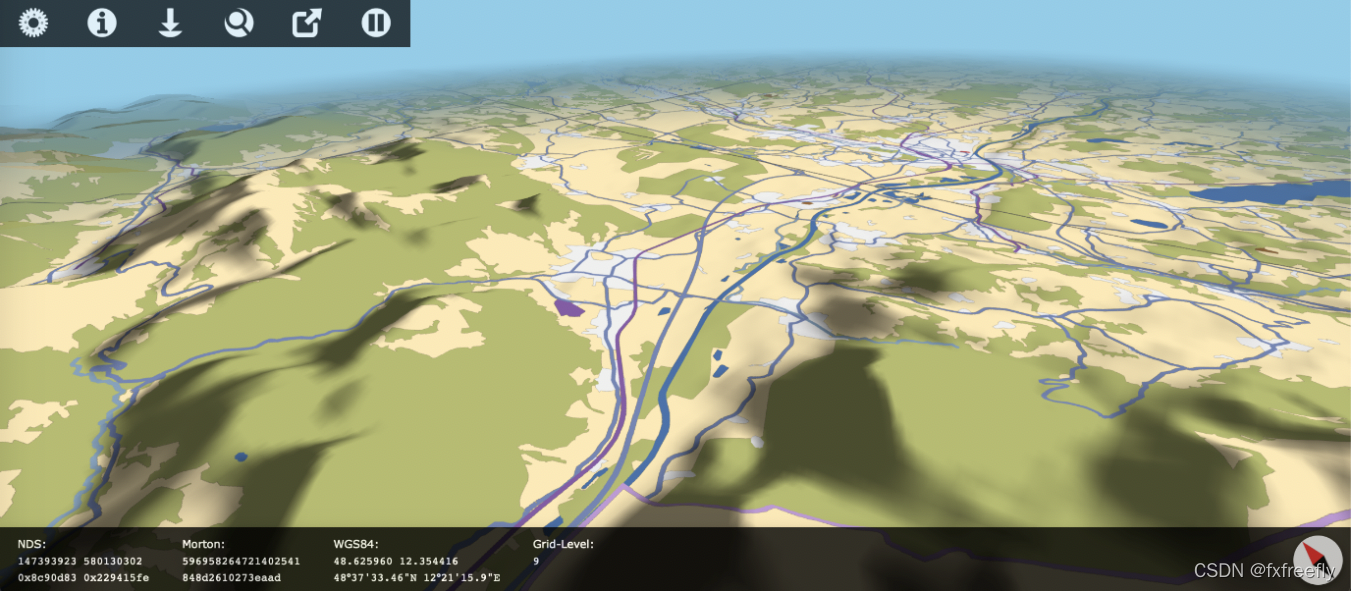
????????NDS��һ�ַdz�ȫ��ĵ�ͼ������ʽ�����������ݿ����ϸ�ֺ�������Level���ּ���,NDS�Ե�ͼ�ĸ�ʽ�淶���÷dz���λ��NDS�зḻ�ĸ�ʽ�ĵ�,���NDS�����ݿ�����ϸ��,ÿ��ϸ�ֺ�IJ�Ʒ���ܹ���������������������ͱ�����һ��NDS�����������������������ݡ�POI����(����ͼ�ϵ�һ����,��ͼ��ÿһ���̼ҵ��̶����Ա���֮Ϊһ��POI���ݵ�),��֧�־ֲ�����,��ʹ�Ƕ�һ�����һ���ʡ�е�������ݽ��оֲ�����,��ʮ�ֱ�ݡ�
????????Ϊ�˷����û�,NDS���ṩ��������γ�ȵ��������ܡ�NDS������һ���dz���Ҫ�ĸ������Level(�߶�),�京�������ڴ�ͳ�ֻ���ͼ�����еı����ߡ�ͨ���Ŵ����С������,�����ȫ����ij������ij��¥�ĵ�ͼ��Ϣ���ֿ鼼����Ϊ��ͼ������һ���ձ�ͨ�õļ���,Ҳ��Ӧ�õ�Level�С����ڵ�ͼ�ķ�Χ�dz���,����Level��������ͼ�г�һ����һ����С����,��ÿ��С������������ݡ���������ʹ�ðٶȵ�ͼ��ߵµ�ͼʱ,��ЩС�����Զ�����
???????��Ȼ��һ�淶ʮ����Ҫ,���Ǹü���Ŀǰ�ڹ�����δ�ռ�,����ʹ������Խ��ձ�,�ر��DZ����ȴ���ʹ�ý϶ࡣ�ò���Ҳ��ʹNDS�ĵ�ͼ��ʽ�淶ȫ�浽λ��ԭ��֮һ��
lanelet2�߾���ͼ
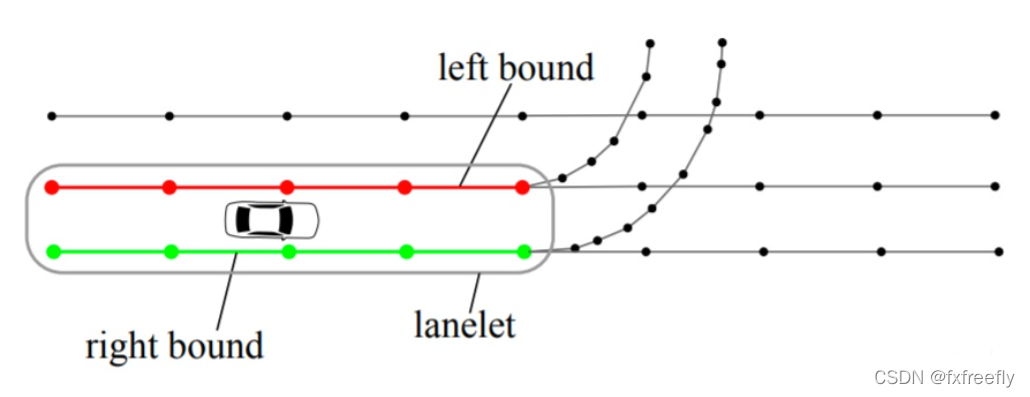
? ? ? ? ?lanelet2���Զ���ʻ����߾��ȵ�ͼ��һ�ָ�Ч���﷽ʽ,���Ա˴�����ӵ�lanelets�������Զ���ʻ����ʻ����,�������Ա��ﳵ������,Ҳ��������������������,ͬʱ���Լ��ɽ�ͨ������˵ļ�ʻϰ�ߡ�
? ? ? ?�����Ŀ�Դ���˼�ʻ����ϵͳAutowareʹ�õĸ߾��ȵ�ͼ��ǰ��Vector Map Format(VMF),�����Ѿ���lanelet2��ʽ��