Python ��״��㿪ʼ OpenCV ѧϰ��-7. �ռ���ͼ���˲�
��ϵ������С��,���㿪ʼʵս��˵ OpenCV ��Ŀʵս��
ͼ���˲����ھ����ܱ���ͼ��ϸ�������������¶�Ŀ��ͼ���������������,�dz��õ�ͼ��Ԥ����������
�ռ���ͼ����ǿ�ķ����ܶ�,���в�ͬ���ص�����á����ڽ��ܿռ����˲���ƽ��(��ͨ�˲�)����(��ͨ�˲�)���������õ�ƽ���㷨�и�˹ƽ������ֵƽ������ֵƽ����˫���˲��������˲���;���õ����㷨�жۻ��ڱΡ�������˹���ӡ�Sobel�ݶ����Ӻ� Scharr �ݶ����ӡ�
�����ṩ���������㷨���������̺����н��,��ͨ��һ��Ӧ�ð���ʾ���ۺ�ʹ�ö���ͼ����ǿ������
����Ŀ¼
- Python ��״��㿪ʼ OpenCV ѧϰ��-7. �ռ���ͼ���˲�
- 1. ͼ���������������
- 2. �ռ���ƽ���˲�(��ͨ�˲�)
- 2.1 ��ͨ��ʽ�˲���
- ���� 1.70:ͼ��ĵ�ͨ�˲�����ʽ�˲���
- 2.2 ��ͨ��˹�˲���
- ���� 1.71:ͼ��ĵ�ͨ�˲�����˹�˲���
- 2.3 �������˲�����ֵ�˲�(Median filter)
- ���� 1.73:ͼ��ķ������˲�����ֵ�˲���
- 2.4 �������˲���˫���˲�(Bilateral filter)
- ���� 1.74:ͼ��ķ������˲���˫���˲���
- 2.5 �������˲�������˫���˲�(Joint bilateral filter)
- 2.6 �������˲��������˲�(Guided filter)
- 3. �ռ������˲�(��ͨ�˲�)
- 4. ��ͨ����ͨ�����衢��ͨ
- 5. �ռ���ͼ����ǿ�������ۺ�Ӧ��
1. ͼ���������������
�˲�ͨ����ָ��ͼ�����ض�Ƶ�ʵķ������й��˻����ơ�ͼ���˲����ھ����ܱ���ͼ��ϸ�������������¶�Ŀ��ͼ���������������,�dz��õ�ͼ��Ԥ����������
���ݲɼ��������һ��������,ͼ���������������Ϊ�Ҷ�ֵ������仯����ͼ���ڿռ�����ڵ��������,����ͨ��ƽ�������������ƻ�ȥ��,��Ϊ�ռ���ͼ���˲���
Ƶ�����˲���ͨ������Ҷ�任����ʵ�ֵ�,���ռ����˲�����ͨ��������������ʵ�֡����õ�ƽ�������㷨�л��ڶ�ά��ɢ�����ĸ�˹ƽ������ֵƽ��,����ͳ�Ʒ�������ֵƽ��,������Ե��Ϣ��˫���˲��������˲��ȡ�
�ռ��˲�����������Ͷ���IJ������ɵ�,�˲����涨���˲�ʱ���õ�������״��������������ֵ�Ĵ����������˲���Ҳ����Ϊ ���ˡ�����ģ�塱�������ڡ�������ģ���������ӡ�,һ�����źŴ����г�Ϊ ���˲�����,����ѧ�����Ϊ ���ˡ��������˲�������ָ�������Ժ˵��˲�,Ҳ���Ǿ������㡣
1.1 ������������
�˲�������ָ������Χijһ��С�ľ�������,Ҳ��Ϊģ�塢�������ڡ�
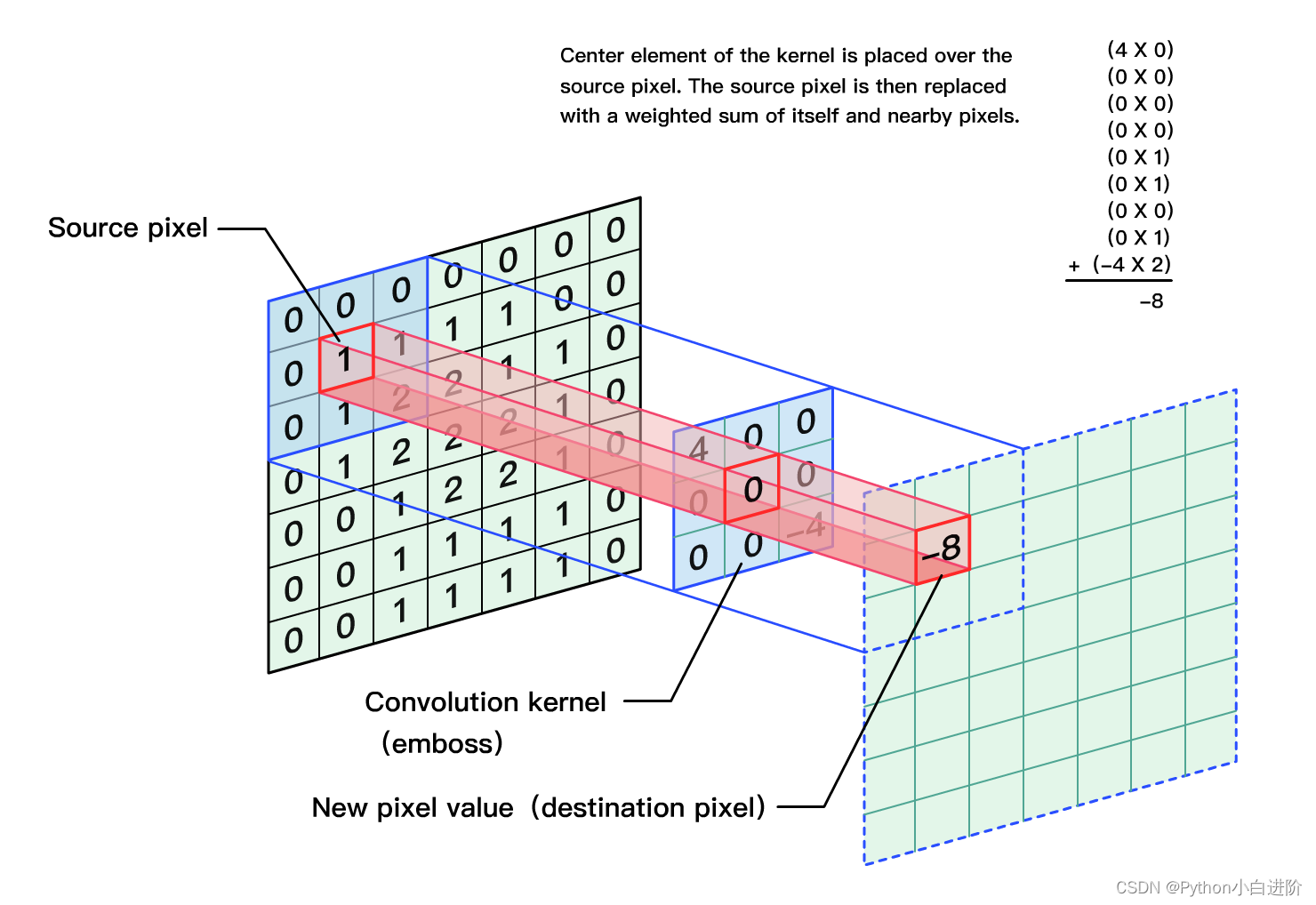
**�������(Correlation operation)**������ģ���ͼ������������:���˲���ģ��������ƶ��������������ص�,��ģ������ĸ����Ȩ��˺���͡�
��СΪ m*n �ĺ�(ģ��) w ��ͼ�� f(x,y) ��������� ( w ? f ) ( x , y ) (w \diamond f)(x,y) (w?f)(x,y) ����ѧ����Ϊ:
(
w
?
f
)
(
x
,
y
)
=
��
s
=
?
a
a
��
t
=
?
b
b
w
(
s
,
t
)
?
f
(
x
+
s
,
y
+
t
)
(w \diamond f)(x,y) = \sum_{s=-a}^a \sum_{t=-b}^b w(s,t) * f(x+s,y+t)
(w?f)(x,y)=s=?a��a?t=?b��b?w(s,t)?f(x+s,y+t)
�������ļ��㲽������:
(1)��ģ����ͼ��������ƶ�,ģ�������ƶ��������������ص���;
(2)��ģ�������еĸ����ϵ��(Ȩֵ)��ͼ�������ֵ���,�Գ˻����,����Ȩ���;
(3)����Ȩ��ͽ����ֵ��ģ�����ĵ����ء�
ע��, ��������㡱 �е� ����ء� ���� ���йصġ�,����һ���ض�����ѧ���㷽ʽ��
**��������(Convolution operation)**Ҳ������ģ���ͼ������������,ֻ�ǰ���������ģ����ת�� 180�ȡ�
��СΪ m*n �ĺ�(ģ��) w ��ͼ�� f(x,y) �ľ�������
(
w
��
f
)
(
x
,
y
)
(w \bigstar f)(x,y)
(w��f)(x,y) ����ѧ����Ϊ:
(
w
��
f
)
(
x
,
y
)
=
��
s
=
?
a
a
��
t
=
?
b
b
w
(
s
,
t
)
?
f
(
x
?
s
,
y
?
t
)
(w \bigstar f)(x,y) = \sum_{s=-a}^a \sum_{t=-b}^b w(s,t) * f(x-s,y-t)
(w��f)(x,y)=s=?a��a?t=?b��b?w(s,t)?f(x?s,y?t)
����������Ͻ����ɡ�����ɺͷ�����,��:
f
��
g
=
g
��
f
f
��
(
g
��
h
)
=
(
f
��
g
)
��
h
f
��
(
g
+
h
)
=
(
f
��
g
)
+
(
f
��
h
)
f \bigstar g = g \bigstar f \\ f \bigstar (g \bigstar h) = (f \bigstar g) \bigstar h \\ f \bigstar (g + h) = (f \bigstar g) + (f \bigstar h)
f��g=g��ff��(g��h)=(f��g)��hf��(g+h)=(f��g)+(f��h)
(��ͼƬ���� ��С��Ѽ�� ��OpenCVѧϰ+���ú�����¼��:ͼ��������˲���,�ش���л��)
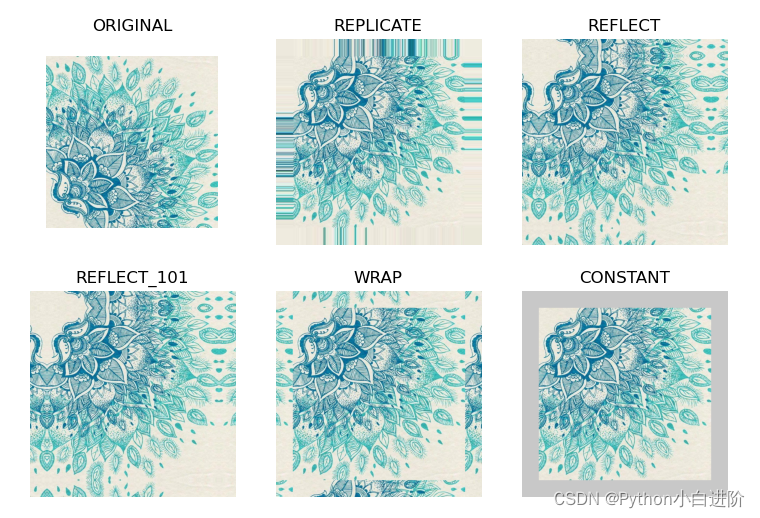
1.2 ͼ��ı߽�����
��غ;������㶼Ҫ��ͼ��ı߽��Ҫ���������,����Ҫ���߽�����ʵ����䡣
����˵��:
OpenCV ���ṩ�˺��� cv.copyMakeBorder ���б߽����䷽ʽ,Ҳ����Ϊͼ�����ñ߿�
cv.copyMakeBorder(src, top, bottom, left, right, borderType[, dst[, value]]) �� dst
����˵��:
- src:���б߽������ͼ��
- top, bottom, left, right:�ϲࡢ�²ࡢ��ࡢ�Ҳ�߽�����ĵĿ���(������)
- value:�� borderType Ϊ BORDER_CONSTANT ʱ,�Գ���(value)�������ı߽�,Ĭ��ֵΪ (0,0,0)
- borderType �߽����������
- cv2.BORDER_REPLICATE:����,�������Ե���ؽ������(aa | abcdefg | gg),��ֵ�˲����ø��Ʒ�
- cv2.BORDER_REFLECT:�ԳƷ�,��ͼ���ԵΪ����жԳ����(cba| abcdefg | gfe)
- cv2.BORDER_REFLECTT_101:��ӳ��,��ͼ�����Ե����Ϊ����жԳ����(dcb| abcdefg | fed),���� filter2D, blur, GaussianBlur, bilateralFilter ��Ĭ�ϵı߽紦������
- cv2.BORDER_WRAP:����һ��Ԫ���������һ�������߽�(efg| abcdefg | ab)
- cv2.BORDER_CONSTANT:�Գ���(value)��Ϊ����ֵ��������(vv | abcdefg | vv)
���� 1.65:ͼ��ı߽�����
# 1.65 ͼ��ı߽�����
img = cv2.imread("../images/imgRose1.jpg") # ��ȡ��ɫͼ��(BGR)
top = bottom = left = right = 50
imgReplicate = cv2.copyMakeBorder(img, top, bottom, left, right, cv2.BORDER_REPLICATE)
imgReflect = cv2.copyMakeBorder(img, top, bottom, left, right, cv2.BORDER_REFLECT)
imgReflect101 = cv2.copyMakeBorder(img, top, bottom, left, right, cv2.BORDER_REFLECT_101)
imgWrap = cv2.copyMakeBorder(img, top, bottom, left, right, cv2.BORDER_WRAP)
imgConstant = cv2.copyMakeBorder(img, top, bottom, left, right, cv2.BORDER_CONSTANT, value=(200,200,200))
plt.figure(figsize=(9, 6))
plt.subplot(231), plt.axis([-50,562,-50,562]), plt.title('ORIGINAL'), plt.axis('off')
plt.imshow(cv2.cvtColor(img, cv2.COLOR_BGR2RGB))
plt.subplot(232), plt.axis('off'), plt.title('REPLICATE')
plt.imshow(cv2.cvtColor(imgReplicate, cv2.COLOR_BGR2RGB))
plt.subplot(233), plt.axis('off'), plt.title('REFLECT')
plt.imshow(cv2.cvtColor(imgReflect, cv2.COLOR_BGR2RGB))
plt.subplot(234), plt.axis('off'), plt.title('REFLECT_101')
plt.imshow(cv2.cvtColor(imgReflect101, cv2.COLOR_BGR2RGB))
plt.subplot(235), plt.axis('off'), plt.title('WRAP')
plt.imshow(cv2.cvtColor(imgWrap, cv2.COLOR_BGR2RGB))
plt.subplot(236), plt.axis('off'), plt.title('CONSTANT')
plt.imshow(cv2.cvtColor(imgConstant, cv2.COLOR_BGR2RGB))
plt.show()
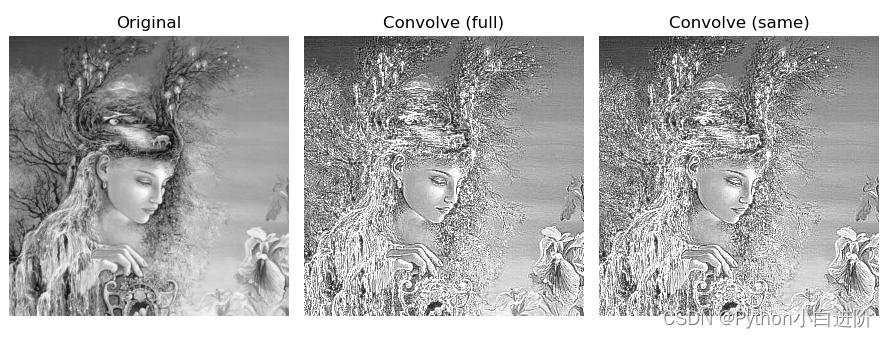
1.3 Scipy ʵ�ֶ�ά��ɢ����(sp.convolve2d)
Scipy ���ṩ�˺��� sp.convolve2d ʵ�ֶ�ά��ɢ�����ļ��㡣
���ڶ�ά��ɢ����������,Python�Ŀ�ѧ�����Scipy�ṩ�˺���ʵ�ָù���:
convolve2d(in1, in2, mode="full", boundary="fill", fillvalue=0) �� dst
����˵��:
- in1:���о��������ͼ��,��ά���顪��ֻ�ܴ�����ͨ��ͼ��,��Ҷ�ͼ��
- in2:����������ģ��(������),��ά����
- mode:��������,��full������valid������same��,Ĭ��ֵΪ ��full��
- boundary:�߽����䷽ʽ,��fill������wrap������symm��,Ĭ��ֵΪ ��fill��
- ��fill��:�Գ���(fillvalue)��Ϊ����ֵ��������(vv | abcdefg | vv)
- ��symm��:�ԳƷ�,��ͼ���ԵΪ����жԳ����(cba| abcdefg | gfe)
- ��wrap��:����һ��Ԫ���������һ�������߽�(efg| abcdefg | ab)
- fillvalue:�� boundary=��fill�� ʱ,���Գ���(fillvalue)��Ϊ����ֵ��������
���� 1.66:scipy.signal ʵ��ͼ��Ķ�ά����
# 1.66 scipy.signal ʵ��ͼ��Ķ�ά����
img = cv2.imread("../images/imgLena.tif", flags=0) # # flags=0 ��ȡΪ�Ҷ�ͼ��
kernel = np.array([[-3-3j,0-10j,+3-3j], [-10+0j,0+0j,+10+0j], [-3+3j,0+10j,+3+3j]]) # Gx + j*Gy
# scipy.signal ʵ�־�������
from scipy import signal
convFull = signal.convolve2d(img, kernel, boundary='symm', mode='full') # full ����
convValid = signal.convolve2d(img, kernel, boundary='symm', mode='valid') # valid ����
convSame = signal.convolve2d(img, kernel, boundary='symm', mode='same') # same ����
print(img.shape, convFull.shape, convValid.shape, convSame.shape) # ���ͼ���С������
plt.figure(figsize=(9, 6))
plt.subplot(131), plt.axis('off'), plt.title('Original'), plt.axis('off')
plt.imshow(img, cmap='gray', vmin=0, vmax=255)
plt.subplot(132), plt.axis('off'), plt.title('Convolve (full)')
plt.imshow(np.absolute(convFull), cmap='gray', vmin=0, vmax=255)
plt.subplot(133), plt.axis('off'), plt.title('Convolve (same)')
plt.imshow(np.absolute(convSame), cmap='gray', vmin=0, vmax=255)
plt.tight_layout()
plt.show()
ע������:
-
signal.convolve2d ֻ�ܶԶ�ά������о�������,���ֻ�ܴ����Ҷ�ͼ�������Ҫ������ɫͼ��,���Էֱ��ÿһͨ�����о���������ʵ�֡�
-
signal.convolve2d ѡ��ͬ�������� ��full������valid������same�� ʱ,ͼ�����Ч���IJ������,��ͼ��ߴ��С������,���벻ͬ����ʱ���ò�ͬ�ı߽紦����ʽ�йء�
img.shape: (512, 512)
convFull.shape: (514, 514)
convValid.shape: (510, 510)
convSame.shape: (512, 512)
1.4 cv2 ʵ�ֶ�ά��ɢ����(flip �� filter2D)
ʹ�� OpenCV �е� cv.flip �� cv.filter2D ����Ҳ����ʵ��ͼ��ľ������㡣
���� cv.flip ʵ��Χ�����߷�ת��ά����,��ͼ�������߽�����ԳƱ任,���Խ�ͼ����ˮƽ����ֱ����ˮƽ/��ֱ����ͬʱ���з�ת������ 1.38 ������ͼ��ķ�ת(����)��ʹ�÷�����
���� cv.filter2D ��ͼ�����(ģ��)������ؼ���,�뺯�� cv.flip ��ͬʵ�־������㡣
����˵��:
cv.filter2D(src, ddepth, kernel[, dst[, anchor[, delta[, borderType]]]]) �� dst
����˵��:
- src:��������������ͼ��,�����ǻҶ�ͼ��,Ҳ�����Ƕ�ͨ���IJ�ɫͼ��
- dst:�������������ͼ��,��С�������� src ��ͬ
- ddepth:Ŀ��ͼ��ÿ��ͨ�������(��������),ddepth=-1 ��ʾ������ͼ�������������ͬ
- kernel:����������ģ��(������),��άʵ������
- anchor:�����˵�ê��λ��,Ĭ��ֵ (-1, -1) ��ʾ�Ծ����˵�����Ϊê��
- delta:���ͼ���ƫ����,��ѡ��,Ĭ��ֵΪ 0
- borderType:�߽����������
cv.filter2D ���Դ����Ҷ�ͼ��,Ҳ����ֱ�Ӵ�����ɫͼ��,����Ҫ��ÿһɫ��ͨ���ֱ������
���� 1.67:cv2 ʵ��ͼ��Ķ�ά����
# 1.67:cv2 ʵ��ͼ��Ķ�ά����
img = cv2.imread("../images/imgGaia.tif", flags=0) # # flags=0 ��ȡΪ�Ҷ�ͼ��
kernel = np.array([[-1, -1, -1], [-1, 9, -1], [-1, -1, -1]]) # Gx + j*Gy
kFlip = cv2.flip(kernel, -1) # ����������ת180��
# ʹ�ú���filter2D���same����
imgConv1 = cv2.filter2D(img, -1, kFlip,
anchor=(0,0), borderType=cv2.BORDER_CONSTANT)
imgConv2 = cv2.filter2D(img, -1, kFlip,
anchor=(0,0), borderType=cv2.BORDER_REFLECT)
plt.figure(figsize=(9, 6))
plt.subplot(131), plt.axis('off'), plt.title('Original'), plt.axis('off')
plt.imshow(img, cmap='gray', vmin=0, vmax=255)
plt.subplot(132), plt.axis('off'), plt.title('cv2.filter2D (BORDER_CONSTANT)')
plt.imshow(np.absolute(imgConv1), cmap='gray', vmin=0, vmax=255)
plt.subplot(133), plt.axis('off'), plt.title('cv2.filter2D (BORDER_REFLECT)')
plt.imshow(np.absolute(imgConv2), cmap='gray', vmin=0, vmax=255)
plt.tight_layout()
plt.show()

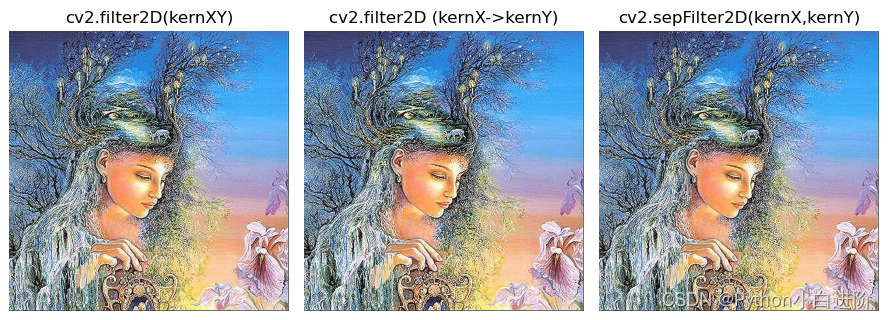
1.5 �ɷ��������
��������� w ���Ա��ֽ�Ϊ����������С�ߴ������ w1��w2��,��: w = w 1 �� w 2 w = w1 \bigstar w2 w=w1��w2,���Ϊ�ɷ�������ˡ�
��Ϊ 1 �ľ�����Էֽ�Ϊһ����������һ���������ij˻�,�����Ϊ 1 �ľ������ǿɷ�������ˡ�
�ɷ�������� w ��ͼ�� f �ľ���(same ����),�������� f �� w1 ����,���� w2 �Խ�����о���:
w
��
f
=
(
w
1
��
w
2
)
��
f
=
w
2
��
(
w
1
��
f
)
=
(
w
1
��
f
)
��
w
2
w \bigstar f = (w_1 \bigstar w_2)\bigstar f = w_2 \bigstar (w_1 \bigstar f) = (w_1 \bigstar f)\bigstar w_2
w��f=(w1?��w2?)��f=w2?��(w1?��f)=(w1?��f)��w2?
����ͼ��ߴ�������˳ߴ������,�÷���ľ��������ζ�ͼ����о�������,������Ч����������ٶȡ����,�ڶ�άͼ������,������һ���ɷ�������˷ֽ�Ϊһάˮƽ�� kernalX ��һά��ֱ�� kernalY �ij˻���
���� sepFilter2D ʵ�ֿɷ����(ģ��)��ͼ����������˲���
����˵��:
cv.sepFilter2D( src, ddepth, kernelX, kernelY[, dst[, anchor[, delta[, borderType]]]]) �� dst # OpenCV4
�ú�������һάˮƽ�� kernalX ��ͼ����н����˲�,����һά��ֱ�� kernalY ��ͼ����н����˲���
����˵��:
- src:��������������ͼ��,�����ǻҶ�ͼ��,Ҳ�����Ƕ�ͨ���IJ�ɫͼ��
- dst:�������������ͼ��,��С�������� src ��ͬ
- ddepth:Ŀ��ͼ��ÿ��ͨ�������(��������),ddepth=-1 ��ʾ������ͼ�������������ͬ
- kernelX:ˮƽ����������,һάʵ������
- kernelY:��ֱ����������,һάʵ������
- anchor:�����˵�ê��λ��,Ĭ��ֵ (-1, -1) ��ʾ�Ծ����˵�����Ϊê��
- delta:���ͼ���ƫ����,��ѡ��,Ĭ��ֵΪ 0
- borderType:�߽����������
���� 1.68:�ɷ���˵ľ�������
# 1.68:�ɷ���˵ľ�������
imgList = list(range(0, 36))
imgTest = np.array(imgList).reshape(6, 6)
# �ɷ��������: kernXY = kernX * kernY
kernX = np.array([[-1, 3, -1]], np.float32) # (1,3)
kernY = np.transpose(kernX) # (3,1)
kernXY = kernX * kernY
print(kernX.shape, kernY.shape, kernXY.shape)
from scipy import signal
# ��ά������ֱ�Ӷ�ͼ����о�������
imgConv_XY = signal.convolve2d(imgTest, kernXY, mode='same', boundary='fill')
# �ɷ�������˷ֽ�Ϊһάˮƽ�� kernalX ��һά��ֱ�� kernalY �ֱ���о�������
imgConv_X = signal.convolve2d(imgTest, kernX, mode='same', boundary='fill')
imgConv_X_Y = signal.convolve2d(imgConv_X, kernY, mode='same', boundary='fill')
print("\n�Ƚ� imgConv_XY �� imgConv_X_Y �Ƿ����:\t", (imgConv_XY == imgConv_X_Y).all())
print("\nimgConv_kernXY:\n", imgConv_XY)
print("\nimgConv_kernX_kernY:\n", imgConv_X_Y)
��������:
(1, 3) (3, 1) (3, 3)
�Ƚ� imgConv_XY �� imgConv_X_Y �Ƿ����: True
imgConv_kernXY:
[[-14. -4. -2. 0. 2. 10.]
[ 11. 7. 8. 9. 10. 23.]
[ 23. 13. 14. 15. 16. 35.]
[ 35. 19. 20. 21. 22. 47.]
[ 47. 25. 26. 27. 28. 59.]
[130. 68. 70. 72. 74. 154.]]
imgConv_kernX_kernY:
[[-14. -4. -2. 0. 2. 10.]
[ 11. 7. 8. 9. 10. 23.]
[ 23. 13. 14. 15. 16. 35.]
[ 35. 19. 20. 21. 22. 47.]
[ 47. 25. 26. 27. 28. 59.]
[130. 68. 70. 72. 74. 154.]]
���� 1.69:�ɷ���˵�ͼ�����
# 1.69:�ɷ���˵�ͼ�����
img = cv2.imread("../images/imgGaia.tif", flags=1)
# �ɷ��������: kernXY = kernX * kernY
kernX = np.array([[-1, 3, -1]], np.float32) # (1,3)
kernY = np.transpose(kernX) # (3,1)
kernXY = kernX * kernY
# (1) �ɷ�������˷ֽ�Ϊһάˮƽ�� kernalX ��һά��ֱ�� kernalY �ֲ����о�������
imgConvY = cv2.filter2D(img, -1, kernY,
anchor=(0,0), borderType=cv2.BORDER_CONSTANT)
imgConv_X_Y = cv2.filter2D(imgConvY, -1, kernX,
anchor=(0,0), borderType=cv2.BORDER_CONSTANT)
# (2) ��ά������ kernXY ֱ�Ӷ�ͼ����о�������
imgConv_XY = cv2.filter2D(img, -1, kernXY,
anchor=(0, 0), borderType=cv2.BORDER_CONSTANT)
# (3) һάˮƽ�� kernalX ��һά��ֱ�� kernalY ���пɷ�������˵ľ�������
imgConvSep_XY = cv2.sepFilter2D(img, -1, kernX, kernY,
anchor=(0,0), borderType=cv2.BORDER_CONSTANT)
print("\n�Ƚ� imgConv_XY �� imgConv_X_Y �Ƿ����:\t", (imgConv_XY == imgConv_X_Y).all())
print("\n�Ƚ� imgConvSep_XY �� imgConv_XY �Ƿ����:\t", (imgConvSep_XY == imgConv_XY).all())
plt.figure(figsize=(9, 6))
plt.subplot(131), plt.axis('off'), plt.title('cv2.filter2D(kernXY)')
plt.imshow(cv2.cvtColor(imgConv_XY, cv2.COLOR_BGR2RGB))
plt.subplot(132), plt.axis('off'), plt.title('cv2.filter2D (kernX->kernY)')
plt.imshow(cv2.cvtColor(imgConv_X_Y, cv2.COLOR_BGR2RGB))
plt.subplot(133), plt.axis('off'), plt.title('cv2.sepFilter2D(kernX,kernY)')
plt.imshow(cv2.cvtColor(imgConvSep_XY, cv2.COLOR_BGR2RGB))
plt.tight_layout()
plt.show()
��������:
�Ƚ� imgConv_XY �� imgConv_X_Y �Ƿ����: False
�Ƚ� imgConvSep_XY �� imgConv_XY �Ƿ����: True
2. �ռ���ƽ���˲�(��ͨ�˲�)
ͼ���˲����ھ����ܱ���ͼ��ϸ�������������¶�Ŀ��ͼ���������������,�dz��õ�ͼ��Ԥ����������
ƽ���˲�Ҳ��Ϊ��ͨ�˲�,��������ͼ���еĻҶ�ͻ��,ʹͼ����ģ��,�ǵ�Ƶ��ǿ�Ŀռ����˲�������ƽ���˲�������:
- ģ��ͼ���ͼ���롣
- ��ͼ����ȡ��ǰƽ��ͼ���Լ��ٻ���
- ����ͼ�����ص�ϸ��
- ƽ����Ҷȼ����������µ�ͼ���α����
���Կռ��˲���ָͼ�����˲�����(������)���о������㡣ƽ����������ͼ��ľ��������ڻ�������,��ͼ���������м�Ȩ���,����ʵ�ֿռ���ƽ���˲���
2.1 ��ͨ��ʽ�˲���
��ʽ������Ŀɷ����ͨ�˲����ˡ���ʽ�˵�ģ�������и����ص��ϵ����ͬ,���Ҳ�ǿɷ���ˡ�
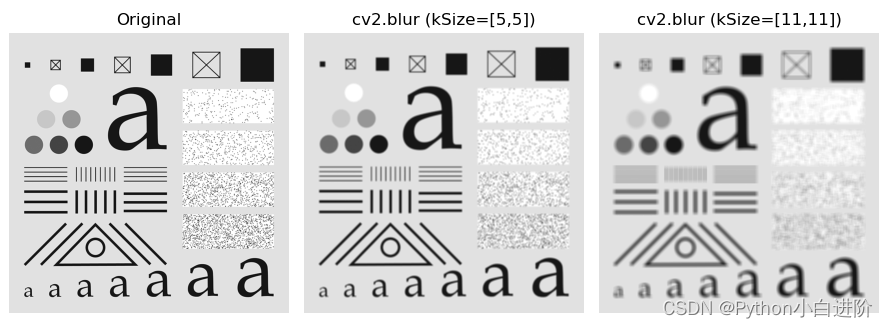
��ʽ�˲����ṹ��,���ڿ���ʵ�ֺ�ʵ�顣����ʽ�˲�������ģ�����ԵĽ��������ϲ�,�����������ش�ֱ����ģ��ͼ��
OpenCV �ṩ�� cv.blur ������ cv.boxFilter ����ʵ�ֺ�ʽ�˲����˵�ͨ�˲���
����˵��:
cv.blur(src, ksize[, dst[, anchor[, borderType]]]) �� dst
���� cv.blur ʹ�õ��˲����˵ı���ʽΪ:
K
=
1
k
s
i
z
e
.
w
i
d
t
h
?
k
s
i
z
e
.
h
e
i
g
h
t
[
1
1
?
1
1
1
?
1
?
?
?
?
1
1
?
1
]
K= \frac{1}{ksize.width * ksize.height} \begin{bmatrix} 1 & 1 &\cdots &1\\ 1 & 1 &\cdots &1\\ \vdots &\vdots &\vdots &\vdots\\ 1 & 1 &\cdots &1 \end{bmatrix}
K=ksize.width?ksize.height1???????11?1?11?1??????11?1???????
����˵��:
- src:��ͨ�˲�����ͼ��,�����ǻҶ�ͼ��,Ҳ�����Ƕ�ͨ���IJ�ɫͼ��
- dst:��ͨ�˲����ͼ��,��С�������� src ��ͬ
- ksize:ģ���˵Ĵ�С,Ԫ�� (width, height),���ȡ��߶�Ӧ��Ϊ������
- anchor:�����˵�ê��λ��,Ĭ��ֵ (-1, -1),��ʾ�Ծ����˵�����Ϊê��
- borderType:�߽����������
����˵��:
cv.boxFilter(src, ddepth, ksize[, dst[, anchor[, normalize[, borderType]]]]) �� dst
���� cv.blur ʹ�õ��˲����˵ı���ʽΪ:
K
=
��
[
1
1
?
1
1
1
?
1
?
?
?
?
1
1
?
1
]
��
=
{
1
k
s
i
z
e
.
w
i
d
t
h
?
k
s
i
z
e
.
h
e
i
g
h
t
,
if?normalize=True
1
,
if?normalize=False
K= \alpha \begin{bmatrix} 1 & 1 &\cdots &1 \\1 & 1 &\cdots &1\\ \vdots &\vdots &\vdots &\vdots\\ 1 & 1 &\cdots &1 \end{bmatrix}\\ \alpha = \begin{cases} \frac{1}{ksize.width * ksize.height}&, \text{if normalize=True}\\ 1 &, \text{if normalize=False}\\ \end{cases}
K=��??????11?1?11?1??????11?1???????��={ksize.width?ksize.height1?1?,if?normalize=True,if?normalize=False?
��Ȼ,�� normalize=True ʱ,���� cv.blur() �ȼ��ں��� cv.boxFilter(normalize=True) ��
����˵��:
- src:��ͨ�˲�����ͼ��,�����ǻҶ�ͼ��,Ҳ�����Ƕ�ͨ���IJ�ɫͼ��
- dst:��ͨ�˲����ͼ��,��С�������� src ��ͬ
- ddepth:���ͼ��ÿ��ͨ�������(��������),ddepth=-1 ��ʾ������ͼ�������������ͬ
- ksize:ģ���˵Ĵ�С,Ԫ�� (width, height),���ȡ��߶�Ӧ��Ϊ������
- anchor:�����˵�ê��λ��,Ĭ��ֵ (-1, -1),��ʾ�Ծ����˵�����Ϊê��
- normalize:��һ��ѡ��,Ĭ��ֵ normalize=True ʱ���й�һ��,��������һ������
- borderType:�߽����������
���� 1.70:ͼ��ĵ�ͨ�˲�����ʽ�˲���
# 1.70:ͼ��ĵ�ͨ�˲� (��ʽ�˲�����)
img = cv2.imread("../images/Fig0515a.tif", flags=0) # # flags=0 ��ȡΪ�Ҷ�ͼ��
kSize = (5, 5)
kernel1 = np.ones(kSize, np.float32) / (kSize[0]*kSize[1]) # ���ɹ�һ����ʽ��
imgConv1 = cv2.filter2D(img, -1, kernel1) # cv2.filter2D ����
imgConv2 = cv2.blur(img, kSize) # cv2.blur ����
imgConv3 = cv2.boxFilter(img, -1, kSize) # cv2.boxFilter ���� (Ĭ��normalize=True)
print("�Ƚ� cv2.filter2D �� cv2.blur ���������ͬ��?\t", (imgConv1 == imgConv2).all())
print("�Ƚ� cv2.blur �� cv2.boxFilter ���������ͬ��?\t", (imgConv2 == imgConv3).all())
kSize = (11, 11)
imgConv11 = cv2.blur(img, kSize) # cv2.blur ����
plt.figure(figsize=(9, 6))
plt.subplot(131), plt.axis('off'), plt.title("Original")
plt.imshow(img, cmap='gray', vmin=0, vmax=255)
plt.subplot(132), plt.axis('off'), plt.title("cv2.blur (kSize=[5,5])")
plt.imshow(imgConv2, cmap='gray', vmin=0, vmax=255)
plt.subplot(133), plt.axis('off'), plt.title("cv2.blur (kSize=[11,11])")
plt.imshow(imgConv11, cmap='gray', vmin=0, vmax=255)
plt.tight_layout()
plt.show()
��������:
�Ƚ� cv2.filter2D �� cv2.blur ���������ͬ��? True
�Ƚ� cv2.blur �� cv2.boxFilter ���������ͬ��? True
2.2 ��ͨ��˹�˲���
ʵ��Ӧ����Ҫ��������Ǹ���ͬ�Ե�(Բ�Գ�),����Ӧ�뷽���ء���˹����Ψһ�ɷ����Բ�Գƺ�,��˷dz��ʺ�ͼ����,����ȥ��ͼ���е���������dz���Ч��
��˹�˵���ѧ����ʽΪ:
w
(
s
,
t
)
=
G
(
s
,
t
)
=
1
2
��
��
2
e
?
r
2
/
2
��
2
w(s,t) = G(s,t) = \frac{1}{2\pi\sigma^2} e^{- {r^2}/{2\sigma ^2}}
w(s,t)=G(s,t)=2����21?e?r2/2��2
����һά��˹���� f �� g �ij˻��;����ľ�ֵ���������:
m
f
��
g
=
m
f
��
g
2
+
m
g
��
f
2
��
g
2
+
��
f
2
,
��
f
��
g
=
��
f
2
?
��
g
2
��
g
2
+
��
f
2
m
f
?
g
=
m
f
+
m
g
,
��
f
?
g
2
=
��
f
2
+
��
g
2
\begin{aligned} m_{f \times g} &= \frac{m_f \sigma _g^2 + m_g \sigma _f^2}{\sigma _g^2 + \sigma _f^2} &,\sigma_{f \times g} &= \frac{\sigma _f^2 * \sigma _g^2}{\sigma _g^2 + \sigma _f^2}\\ m_{f \star g} &= m_f + m_g &,\sigma_{f \star g} ^2 &= \sigma _f^2 + \sigma _g^2 \end{aligned}
mf��g?mf?g??=��g2?+��f2?mf?��g2?+mg?��f2??=mf?+mg??,��f��g?,��f?g2??=��g2?+��f2?��f2??��g2??=��f2?+��g2??
OpenCV �ṩ�� cv.GaussianBlur ����ʵ�ָ�˹�˵�ͨ�˲���,cv.getGaussianKernel �������Լ���һά��˹�˲�����ϵ����
����˵��:
cv.GaussianBlur(src, ksize, sigmaX[, dst[, sigmaY[, borderType]]]) �� dst
cv.getGaussianKernel(ksize, sigma[, ktype]) �� retval
����˵��:
- src:��ͨ�˲�����ͼ��,�����ǻҶ�ͼ��,Ҳ�����Ƕ�ͨ���IJ�ɫͼ��
- dst:��ͨ�˲����ͼ��,��С�������� src ��ͬ
- ksize:ģ���˵Ĵ�С,Ԫ�� (width, height),���ȡ��߶�Ӧ��Ϊ������
- sigmaX:x �᷽��ĸ�˹�˱���
- sigmaY:y �᷽��ĸ�˹�˱���,��ѡ��
- borderType:�߽����������
- sigma:��˹�˵ı���
- retval:����ֵ,��˹�˲�����ϵ��
ע������:
-
sigmaY ȱʡʱ sigmaY=sigmaX;sigmaY=sigmaX=0 ʱ,�� ksize �Զ����㲢���� sigmaY, sigmaX ��ֵ��
-
�� sigma Ϊ��ֵ,�� ksize �Զ����㲢���� sigma ��ֵ:
sigma = 0.3*((ksize-1)/2 - 1) + 0.8��
���� 1.71:ͼ��ĵ�ͨ�˲�����˹�˲���
# 1.71:ͼ��ĵ�ͨ�˲� (��˹�˲�����)
img = cv2.imread("../images/imgLena.tif", flags=1)
kSize = (5, 5)
imgGaussBlur1 = cv2.GaussianBlur(img, (5,5), sigmaX=10)
imgGaussBlur2 = cv2.GaussianBlur(img, (11,11), sigmaX=20)
# �����˹��
gaussX = cv2.getGaussianKernel(5, 0)
gaussXY = gaussX * gaussX.transpose(1, 0)
print("gaussX:\n", gaussX)
print("gaussXY:\n", gaussXY)
plt.figure(figsize=(9, 6))
plt.subplot(131), plt.axis('off'), plt.title("Original")
plt.imshow(cv2.cvtColor(img, cv2.COLOR_BGR2RGB))
plt.subplot(132), plt.axis('off'), plt.title("ksize=5, sigma=10")
plt.imshow(cv2.cvtColor(imgGaussBlur1, cv2.COLOR_BGR2RGB))
plt.subplot(133), plt.axis('off'), plt.title("ksize=11, sigma=20")
plt.imshow(cv2.cvtColor(imgGaussBlur2, cv2.COLOR_BGR2RGB))
plt.tight_layout()
plt.show()
��������:
gaussX:
[[0.0625]
[0.25 ]
[0.375 ]
[0.25 ]
[0.0625]]
gaussXY:
[[0.00390625 0.015625 0.0234375 0.015625 0.00390625]
[0.015625 0.0625 0.09375 0.0625 0.015625 ]
[0.0234375 0.09375 0.140625 0.09375 0.0234375 ]
[0.015625 0.0625 0.09375 0.0625 0.015625 ]
[0.00390625 0.015625 0.0234375 0.015625 0.00390625]]

2.3 �������˲�����ֵ�˲�(Median filter)
��ֵ�˲���һ�ַ������˲�����,�ǻ���ͳ���������˲��� ����ֵ�˲��������ص�������ڵ��������ص�Ҷ�ֵ����ֵ��Ϊ�����ص�ĻҶ�ֵ��
ע����ֵ����ƽ��ֵ,���ǰ���С������м�ֵ��������Ҫ�������,��ֵ�˲����ĵ�����ʱ��ܳ���
��ֵ�˲����������ص�ĻҶ�ֵ,���ܱ��ֲ���,Ҳ���ܸı�Ϊ�������������ص�ĻҶ�ֵ��
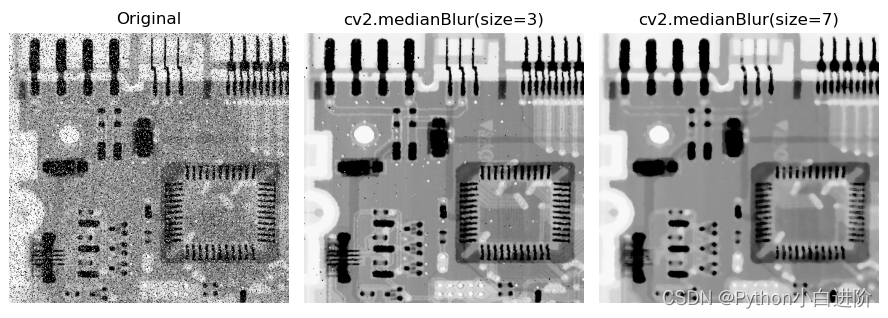
��ֵ�˲���������ͼ���еĽ��������dz���Ч����������Ҳ��Ϊ��������,��������ֵİ���ߺڵ�,ͨ��������Ӱ��Ѷ���ܵ����Ŷ�����,��������š�ͼ��ɨ�衣
OpenCV �ṩ�� cv.medianBlur ����ʵ����ֵ�˲��㷨��
����˵��:
cv.medianBlur(src, ksize[, dst]) �� dst
����˵��:
- src:����ͼ��,�����ǻҶ�ͼ��,Ҳ�����Ƕ�ͨ���IJ�ɫͼ��
- dst:���ͼ��,��С�������� src ��ͬ
- ksize:ģ���˵����Դ�С,���� 1 ������
���� 1.73:ͼ��ķ������˲�����ֵ�˲���
# 1.73:ͼ��ķ������˲� (��ֵ�˲���)
img = cv2.imread("../images/Fig0335a.tif", flags=1)
imgMedianBlur1 = cv2.medianBlur(img, 3)
imgMedianBlur2 = cv2.medianBlur(img, 7)
plt.figure(figsize=(9, 6))
plt.subplot(131), plt.axis('off'), plt.title("Original")
plt.imshow(cv2.cvtColor(img, cv2.COLOR_BGR2RGB))
plt.subplot(132), plt.axis('off'), plt.title("cv2.medianBlur(size=3)")
plt.imshow(cv2.cvtColor(imgMedianBlur1, cv2.COLOR_BGR2RGB))
plt.subplot(133), plt.axis('off'), plt.title("cv2.medianBlur(size=7)")
plt.imshow(cv2.cvtColor(imgMedianBlur2, cv2.COLOR_BGR2RGB))
plt.tight_layout()
plt.show()
2.4 �������˲���˫���˲�(Bilateral filter)
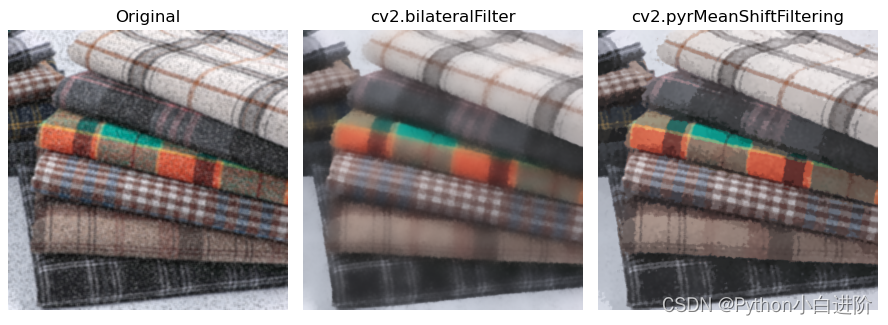
˫���˲���һ�ַ������˲�����,�ǽ��ͼ��Ŀռ��ڽ��Ⱥ�����ֵ���ƶȵ�һ�����Դ���,ͬʱ���ǿ�����Ϣ�ͻҶ�������,��ȥ��������ͬʱ��Ч�ر��ֱ�Ե��������,�����������������չ��ܡ�
��Ե�ĻҶȱ仯�ϴ�,��˹�˲������Ե�ģ����Ե,���ڸ�Ƶϸ�ڵı���������˫���˲����ڿռ���Ҳ���ø�˹�˲���,��������һ����ӳ����ǿ�Ȳ���ĸ�˹���� �� d \sigma_d ��d? ,�ڱ�Ե������Ľ�Զ�����ضԱ�Ե�ϵ�����ֵӰ���С,�Ӷ���֤�˱�Ե����������ֵ,ʵ�ֱ�Ե����(edge preserving)��˫���˲�����Ȩֵ�ǿռ��ٽ���Ȩֵ������ֵ���ƶ�Ȩֵ�ij˻�,���������������ڵ�ǰ���������ص�����,��ȡ���ڱ��������صĻҶ�ֵ���������صĻҶ�ֵ�IJ
˫���˲����˵���ѧ����ʽΪ:
g
(
i
,
j
)
=
��
f
(
k
,
l
)
w
��
w
w
=
w
s
?
w
r
w
s
=
e
?
[
(
i
?
k
)
2
+
(
j
?
l
)
2
]
/
2
��
s
2
w
r
=
e
?
��
(
f
(
i
,
j
)
?
f
(
k
,
l
)
��
2
/
2
��
r
2
g(i,j) = \frac{\sum f(k,l) w}{\sum w}\\ w = ws * wr\\ ws = e^{- [{(i-k)^2+(j-l)^2}]/{2\sigma _s^2}}\\ wr = e^{- \lVert {(f(i,j)-f(k,l)} \rVert ^2/{2\sigma _r^2}}
g(i,j)=��w��f(k,l)w?w=ws?wrws=e?[(i?k)2+(j?l)2]/2��s2?wr=e?��(f(i,j)?f(k,l)��2/2��r2?
˫���˲������ڵ�Ƶ��Ϣ���˲�Ч���Ϻ�,�����ܸɾ��ع��˲�ɫͼ����ĸ�Ƶ������
OpenCV �ṩ�� cv. bilateralFilter ��������ʵ��ͼ���˫���˲���
����˵��:
cv.bilateralFilter(src, d, sigmaColor, sigmaSpace[, dst[, borderType]]) �� dst
����˵��:
- src:����ͼ��,�����ǻҶ�ͼ��,Ҳ�����Ƕ�ͨ���IJ�ɫͼ��
- dst:���ͼ��,��С�������� src ��ͬ
- d:�˲��˵���������ֱ������ d<=0 ,���ɴ� sigmaSpace ����õ���
- sigmaColor:�˲���������ɫ�ռ�ķ���,��ӳ������ɫӰ�����ɫǿ������Ĵ�С
- sigmaSpace:�˲�����������ռ�ķ���,��ӳ������ɫӰ���Ӱ��ռ�Ĵ�С
- borderType:�߽����������
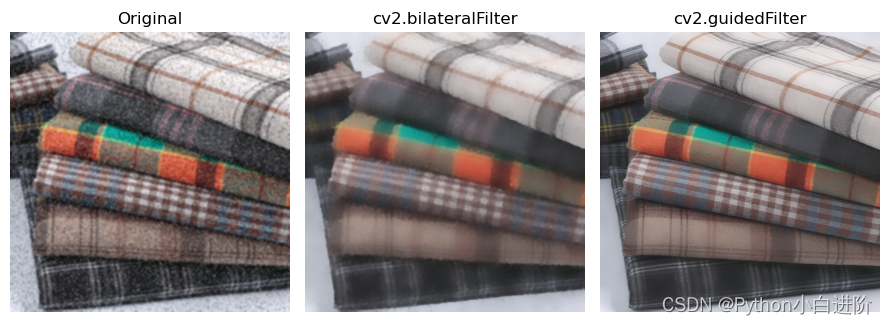
���� 1.74:ͼ��ķ������˲���˫���˲���
# 1.74:ͼ��ķ������˲���˫���˲���
img = cv2.imread("../images/imgFabricNoise.png", flags=1)
imgBiFilter = cv2.bilateralFilter(img, d=0, sigmaColor=100, sigmaSpace=10)
imgMeanFilter = cv2.pyrMeanShiftFiltering(img, sp=15, sr=20)
plt.figure(figsize=(9, 6))
plt.subplot(131), plt.axis('off'), plt.title("Original")
plt.imshow(cv2.cvtColor(img, cv2.COLOR_BGR2RGB))
plt.subplot(132), plt.axis('off'), plt.title("cv2.bilateralFilter")
plt.imshow(cv2.cvtColor(imgBiFilter, cv2.COLOR_BGR2RGB))
plt.subplot(133), plt.axis('off'), plt.title("cv2.pyrMeanShiftFiltering")
plt.imshow(cv2.cvtColor(imgMeanFilter, cv2.COLOR_BGR2RGB))
plt.tight_layout()
plt.show()
2.5 �������˲�������˫���˲�(Joint bilateral filter)
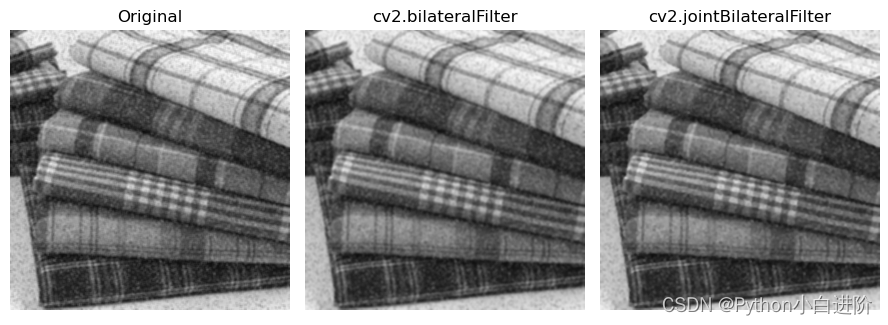
����˫���˲�����˫���˲������϶�������Ȩ��ģ������Ż�,��������ͼ��Ĵ���Ч���Ϻá�
����˫���˲���˫���˲�����������:˫���˲��Ǹ���ͼ���в�ͬλ�õĻҶ�ֵ���콨��������Ȩ��ģ��,�������Ȩ��ģ����˼��������;�����˲����ȶ�ͼ����и�˹ƽ��,Ȼ����ݸ�˹ƽ��ͼ��ĻҶ�ֵ���콨��������ģ��,�ټ�������ˡ�������˫���˲��Ǹ���ԭʼͼ��ĸ�˹ƽ����Ϊ����ͼƬ������������ģ�塣��һ����,���ʹ����������ͼƬ������������ģ��,������ʵ���������ܡ�
OpenCV �� ximgproc ģ���ṩ�� cv.ximgproc.jointBilateralFilter ����ʵ������˫���˲��㷨��
����˵��:
cv.ximgproc.jointBilateralFilter(joint, src, d, sigmaColor, sigmaSpace[, dst[, borderType]]) �� dst
����˵��:
- src:����ͼ��,�����ǻҶ�ͼ��,Ҳ�����Ƕ�ͨ���IJ�ɫͼ��
- joint:�����˲��ĵ���ͼ��,��С�������� src ��ͬ
- dst:���ͼ��,��С�������� src ��ͬ
- d:�˲��˵���������ֱ��
- sigmaColor:�˲���������ɫ�ռ�ķ���,��ӳ������ɫӰ�����ɫǿ������Ĵ�С
- sigmaSpace:�˲�����������ռ�ķ���,��ӳ������ɫӰ���Ӱ��ռ�Ĵ�С
- borderType:�߽����������
ע������:
- OpenCV3 �е� ximgproc ģ���ṩ����˫���˲��㷨��ximgproc ������չģ��,�����Ҫ��װ��չ��(opencv-contrib-python)�ṩ֧�֡�
- ������ģ��,��������contrib,���е�ximgprocģ�����������˫���˲����㷨����������Ҫʹ��opencv������˫���˲�,��Ҫ��װopencv-contrib-python����
�����:
(��)
2.6 �������˲��������˲�(Guided filter)
�����˲��ֳ������˲�,ͨ��һ������ͼƬ��ӳ��Ե���������Ϣ,������ͼ������˲�����,ʹ���ͼ�������������ͼ�����,������������ͼƬ���ơ�
�����˲���ԭ���Ǿֲ�����ģ��,�ڱ���˫���˲�������(��Ч���ֱ�Ե,�ǵ�������)��ͬʱ�����ٶȺܿ졣
���˷�˫���˲��ٶ�����ȱ��,
�����˲�(�����˲�)������ʵ��˫���˲��ı�Եƽ��,�����ڼ���Ե�����кܺõı���,��Ӧ����ͼ����ǿ��HDRѹ����ͼ���ͼ��ͼ��ȥ���ȳ�����
�ڽ��б��ֱ�Ե�˲�ʱ,���Բ���ԭʼͼ����������Ԥ�������ͼ����Ϊ����ͼƬ��
OpenCV �� ximgproc ģ���ṩ�� cv.ximgproc.guidedFilter ����ʵ�ֵ����˲��㷨��
����˵��:
cv.ximgproc_guidedFilter.filter(guide, src, d[, eps[, dDepth]) �� dst
����˵��:
- src:����ͼ��,�����ǻҶ�ͼ��,Ҳ�����Ƕ�ͨ���IJ�ɫͼ��
- guide:����ͼ��,��С�������� src ��ͬ
- dst:���ͼ��,��С�������� src ��ͬ
- d:�˲��˵���������ֱ��
- eps:�淶������, eps ��ƽ��������˫���˲��е� sigmaColor
- dDepth:���ͼƬ���������
�����:
(��)
3. �ռ������˲�(��ͨ�˲�)
3.1 ͼ����ݶ�����
ͼ��ģ��ͨ��ƽ��(��Ȩƽ��)��ʵ��,�����ڻ������㡣ͼ������ͨ��������(�����)ʵ��,ʹ��һ���ֻ�����ֶ����Եõ�ͼ��Ҷȵı仯ֵ��
ͼ����Ŀ������ǿͼ��ĻҶ����䲿��,ʹģ����ͼ����������ͼ����Ҳ��Ϊ��ͨ�˲�,ͨ������ǿ��Ƶ,˥�������Ƶ�Ƶ��ͼ�������ڵ���ӡˢ��ҽѧ�����ҵ��⡣
- �㶨�Ҷ�����,һ����Ϊ��,������Ϊ��;
- �Ҷ�̨��б���������,һ��������,,����������;
- �Ҷ�б������,һ��������,������Ϊ�㡣
һ������������������ֹ�ʽΪ:
? f ? x = f ( x + 1 ) ? f ( x ) ? 2 f ? x 2 = f ( x + 1 ) ? 2 f ( x ) + f ( x ? 1 ) \begin{aligned} \dfrac{\partial f}{\partial x} &= f(x+1) - f(x) \\ \dfrac{\partial ^2 f}{\partial x ^2} &= f(x+1) - 2f(x) + f(x-1) \end{aligned} ?x?f??x2?2f??=f(x+1)?f(x)=f(x+1)?2f(x)+f(x?1)?
��ͼ������,һ�������ݶ�(��ά������)��ʾ:
?
f
=
g
r
a
d
(
f
)
=
[
g
x
g
y
]
=
[
?
f
/
?
x
?
f
/
?
x
]
\nabla f = grad(f)=\begin{bmatrix}g_x\\g_y\end{bmatrix}=\begin{bmatrix}\partial f /\partial x \\\partial f /\partial x \end{bmatrix}
?f=grad(f)=[gx?gy??]=[?f/?x?f/?x?]
�ݶ�ָ��������ֵ�����仯�ʵķ���,�������ڹ�ҵ����в�Ʒȱ�ݼ����Զ�����Ԥ������
ͼ���ݶ���ȡ������ֱ��,�ܹ���Ч������ͼ���ԭʼ״̬,��˷�չ������ͼ���ݶ�����:Roberts��Prewitt��Sobel��Laplacian��Scharr��
3.2 �ۻ��ڱ�
��,��ԭʼͼ���м�ȥһ��ƽ�������Ķۻ�ͼ��,Ҳ����ʵ��ͼ����Ч��,��Ϊ�ۻ��ڱΡ�
��
f
~
(
x
,
y
)
\tilde{f}(x,y)
f~?(x,y) ��ʾƽ��ͼ��,��:
KaTeX parse error: No such environment: align at position 8: \begin{?a?l?i?g?n?}? g_{mask} (x,y)��
�� k>1 ʱ,ʵ�ָ������˲�;�� k=1 ʱ,ʵ�ֶۻ��ڱ�;k<1ʱ,�����ۻ��ڱΡ�
���,�ۻ��ڱε�ʵ�ֹ�����:
(1)��ԭʼͼ�����ƽ������,�õ�ƽ��ͼ��;
(2)��ԭʼͼ���м�ȥƽ��ͼ��,�����ڱ�ģ��;
(3)��ԭʼͼ�����ڱ�ģ���Ȩ���,�õ��ۻ��ڱΡ�
ԭͼ��ȥģ��ͼ�Ľ��Ϊģ��,���ͼ�����ԭͼ���ϼ�Ȩ���ģ��,��Ȩ��Ϊ1�õ������ڱ�,��Ȩ�ش���1��Ϊ�������˲���
�ۻ��ڱ�û��ֱ�Ӽ����ʹ���ݶ�����,������������������������,��˱��������ݶ��㷨,����ʵ�����˲���Ч����
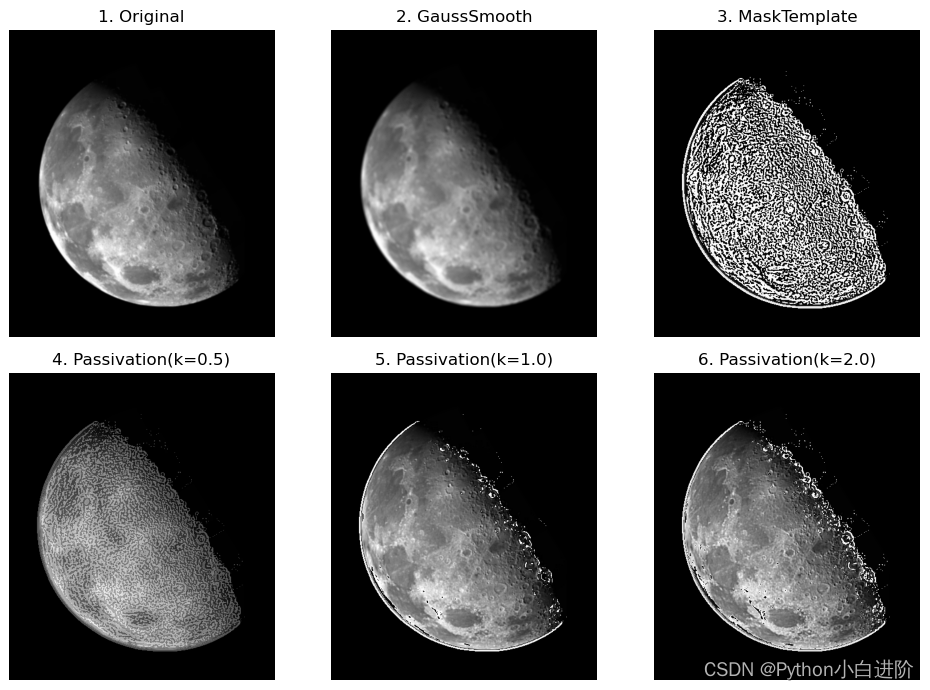
���� 1.77:ͼ����: �ۻ��ڱ�
# 1.77:ͼ����: �ۻ��ڱ�
img = cv2.imread("../images/Fig0338a.tif", flags=0)
# ��ԭʼͼ�����ƽ��,GaussianBlur(img, size, sigmaX)
imgGauss = cv2.GaussianBlur(img, (5,5), sigmaX=5)
imgGaussNorm = cv2.normalize(imgGauss,dst=None,alpha=0,beta=255,norm_type=cv2.NORM_MINMAX)
# �ڱ�ģ��:��ԭʼͼ���м�ȥƽ��ͼ��
imgMask = img - imgGaussNorm
passivation1 = img + 0.6 * imgMask # k<1 �����ۻ��ڱ�
imgPas1 = cv2.normalize(passivation1, None, 0, 255, cv2.NORM_MINMAX)
passivation2 = img + imgMask # k=1 �ۻ��ڱ�
imgPas2 = cv2.normalize(passivation2, None, 0, 255, cv2.NORM_MINMAX)
passivation3 = img + 2 * imgMask # k>1 �������˲�
imgPas3 = cv2.normalize(passivation3, None, 0, 255, cv2.NORM_MINMAX)
plt.figure(figsize=(10, 7))
titleList = ["1. Original", "2. GaussSmooth", "3. MaskTemplate",
"4. Passivation(k=0.5)", "5. Passivation(k=1.0)", "6. Passivation(k=2.0)"]
imageList = [img, imgGauss, imgMask, imgPas1, imgPas2, imgPas3]
for i in range(6):
plt.subplot(2,3,i+1), plt.title(titleList[i]), plt.axis('off')
plt.imshow(imageList[i], 'gray', vmin=0, vmax=255)
plt.tight_layout()
plt.show()
�ۻ��ڱε�ͼ����Ч������ͼ��ʾ,ע� k>1 ʱ,ʵ�ָ������˲�;�� k=1 ʱ,ʵ�ֶۻ��ڱ�;���� k<1ʱ�������ۻ��ڱΡ�
3.3 ������˹������(Laplacian)
����ͬ�Ծ����˵���Ӧ�뷽���ء���ĸ���ͬ�Ե�������(������)��������˹����(Laplace):
? 2 f = ? 2 f ? x 2 + ? 2 f ? y 2 ? 2 f ? x 2 = f ( x + 1 , y ) ? 2 f ( x , y ) + f ( x ? 1 , y ) ? 2 f ? y 2 = f ( x , y + 1 ) ? 2 f ( x , y ) + f ( x , y ? 1 ) ? 2 f ( x , y ) = f ( x + 1 , y ) + f ( x ? 1 , y ) + f ( x , y + 1 ) + f ( x , y ? 1 ) ? 4 f ( x , y ) \begin{aligned} \nabla ^2 f &= \dfrac{\partial ^2 f}{\partial x ^2} + \dfrac{\partial ^2 f}{\partial y ^2} \\ \dfrac{\partial ^2 f}{\partial x ^2} &= f(x+1,y) - 2f(x,y) + f(x-1,y) \\ \dfrac{\partial ^2 f}{\partial y ^2} &= f(x,y+1) - 2f(x,y) + f(x,y-1) \\ \nabla ^2 f(x,y) &= f(x+1,y) + f(x-1,y) + f(x,y+1) + f(x,y-1) - 4f(x,y) \end{aligned} ?2f?x2?2f??y2?2f??2f(x,y)?=?x2?2f?+?y2?2f?=f(x+1,y)?2f(x,y)+f(x?1,y)=f(x,y+1)?2f(x,y)+f(x,y?1)=f(x+1,y)+f(x?1,y)+f(x,y+1)+f(x,y?1)?4f(x,y)?
�ɴ˿��Եõ�������˹�� K1�����Ƶ�,���ǶԽ������Եõ�������˹�� K2��
K 1 = [ 0 1 0 1 ? 4 1 0 1 0 ] , ? K 2 = [ 1 1 1 1 ? 8 1 1 1 1 ] , ? K 3 = [ 0 ? 1 0 ? 1 4 ? 1 0 ? 1 0 ] , ? K 4 = [ ? 1 ? 1 ? 1 ? 1 8 ? 1 ? 1 ? 1 ? 1 ] K1= \begin{bmatrix} 0 & 1 &0\\ 1 & -4 &1\\ 0 & 1 &0\\ \end{bmatrix}, \ K2= \begin{bmatrix} 1 & 1 &1\\ 1 & -8 &1\\ 1 & 1 &1\\ \end{bmatrix}, \ K3= \begin{bmatrix} 0 & -1 &0\\ -1 & 4 &-1\\ 0 & -1 &0\\ \end{bmatrix}, \ K4= \begin{bmatrix} -1 & -1 &-1\\ -1 & 8 &-1\\ -1 & -1 &-1\\ \end{bmatrix} K1=???010?1?41?010????,?K2=???111?1?81?111????,?K3=???0?10??14?1?0?10????,?K4=????1?1?1??18?1??1?1?1????
Laplace �ǵ�������,��ͻ��ͼ���еļ���Ҷȱ仯,���ƻҶȻ����仯����,�����������ɫ�����µĻ�ɫ��Ե�Ͳ�����ͼ��������˹ͼ����ԭͼ����,���Եõ�������Ч����ͼ��
������˹�����˺�����ͨ���������� cv. filter_2d ʵ��,OpenCV Ҳ�ṩ��������˹���� cv.Laplacian ��ʵ�֡�
����˵��:
cv.Laplacian(src, ddepth[, dst[, ksize[, scale[, delta[, borderType]]]]]) �� dst
����˵��:
-
src:����ͼ��,�����ǻҶ�ͼ��,Ҳ�����Ƕ�ͨ���IJ�ɫͼ��
-
ddepth:���ͼƬ���������:
-
dst:���ͼ��,��С�������� src ��ͬ
-
ksize:����������˲����Ŀ���С,����Ϊ������,��ѡ��
-
scale:���ű�������,��ѡ��,Ĭ��ֵΪ 1
-
delta:���ͼ���ƫ����,��ѡ��,Ĭ��ֵΪ 0
-
borderType:�߽����������,ע�ⲻ֧�ֶԲ����(BORDER_WRAP)
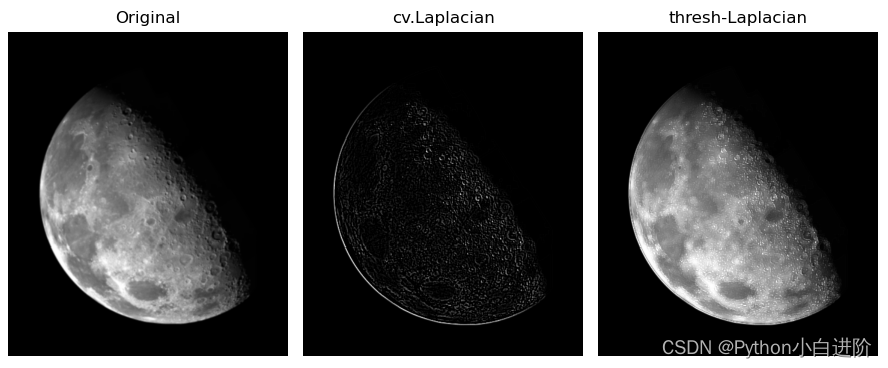
���� 1.78:ͼ����:Laplacian ����
# 1.78:ͼ����:������˹���� (Laplacian)
img = cv2.imread("../images/Fig0338a.tif", flags=0) # NASA ����Ӱ��ͼ
# ʹ�ú��� filter2D ʵ�� Laplace ��������
kernLaplace = np.array([[0, 1, 0], [1, -4, 1], [0, 1, 0]]) # Laplacian kernel
imgLaplace1 = cv2.filter2D(img, -1, kernLaplace, borderType=cv2.BORDER_REFLECT)
# ʹ�� cv2.Laplacian ʵ�� Laplace ��������
imgLaplace2 = cv2.Laplacian(img, -1, ksize=3)
imgRecovery = cv2.add(img, imgLaplace2) # �ָ�ԭͼ��
# ��ֵ����Եͼ�پ���
ret, binary = cv2.threshold(img, 0, 255, cv2.THRESH_BINARY | cv2.THRESH_TRIANGLE)
imgLaplace3 = cv2.Laplacian(binary, cv2.CV_64F)
imgLaplace3 = cv2.convertScaleAbs(imgLaplace3)
plt.figure(figsize=(9, 6))
plt.subplot(131), plt.axis('off'), plt.title("Original")
plt.imshow(img, cmap='gray', vmin=0, vmax=255)
plt.subplot(132), plt.axis('off'), plt.title("cv.Laplacian")
plt.imshow(imgLaplace2, cmap='gray', vmin=0, vmax=255)
plt.subplot(133), plt.axis('off'), plt.title("thresh-Laplacian")
plt.imshow(imgLaplace3, cmap='gray', vmin=0, vmax=255)
plt.tight_layout()
plt.show()
����������˹�����˺�����,�����Ƚ�����ֵ������,�ٽ���������˹���������̶Ա���ֱ�ӽ���������˹����,����ֵ�����������������˹����,�������ͼ��ʾ��
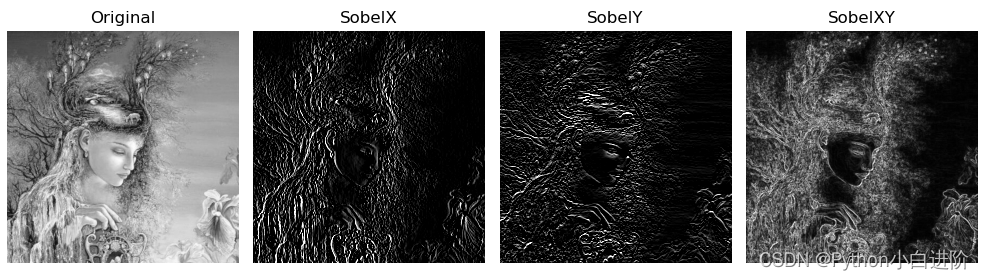
3.4 Sobel �ݶ�����
Sobel ������һ����ɢ��������,�Ǹ�˹ƽ����������������,����������ǿ��
Sobel �ݶ��������þֲ����Ѱ�ұ�Ե,����õ��ݶȵĽ���ֵ���ȼ���ˮƽ����ֱ������ݶ� G x = k x ? s r c G_x = k_x * src Gx?=kx??src, G y = k y ? s r c G_y = k_y * src Gy?=ky??src,�������ݶ� $ G = \sqrt{G_x2+G_y2}$ �����ʵ��ʱ,�����þ���ֵ����ƽ����: G = �O G x �O + �O G y �O G = |G_x| + |G_y| G=�OGx?�O+�OGy?�O��
Sobel �ݶ���������ƽ�����ӺͲ�����Ӿ����õ�,Sobel �ݶ����ӵľ�����Ϊ:
K
x
=
[
?
1
0
1
?
2
0
2
?
1
0
1
]
,
?
K
y
=
[
?
1
?
2
?
1
0
0
0
1
2
1
]
K_x = \begin{bmatrix} -1 & 0 &1\\ -2 & 0 &2\\ -1 & 0 &1\\ \end{bmatrix}, \ K_y = \begin{bmatrix} -1 &-2 &-1\\ 0 &0 &0\\ 1 &2 &1\\ \end{bmatrix}
Kx?=????1?2?1?000?121????,?Ky?=????101??202??101????
Sobel �ݶ����Ӻ�����ͨ���������� cv.filter2D ʵ��,OpenCV Ҳ�ṩ�˺��� cv.Sobel ʵ�� Sobel �ݶ����ӡ�
����˵��:
cv.Sobel(src, ddepth, dx, dy[, dst[, ksize[, scale[, delta[, borderType]]]]]) �� dst
����˵��:
- src:����ͼ��,�Ҷ�ͼ��,�����ò�ɫͼ��
- dst:���ͼ��,��С�������� src ��ͬ
- ddepth:���ͼƬ���������,������ͼ�����Ƚ���ѡ��
- dx:x �᷽�����Ľ���,1 �� 2
- dy:y �᷽�����Ľ���,1 �� 2
- ksize:Sobel �����˵Ĵ�С,��ѡ��ȡֵΪ:1/3/5/7,ksize=-1 ʱʹ�� Scharr ��������
- scale:���ű�������,��ѡ��,Ĭ��ֵΪ 1
- delta:���ͼ���ƫ����,��ѡ��,Ĭ��ֵΪ 0
- borderType:�߽����������,ע�ⲻ֧�ֶԲ����(BORDER_WRAP)
ע������:
- ddepth �����ñȽϸ���,�������׳���������ƪ�����IJ���չ����
����,Ϊ�˴��������㵼�µ������쳣(���� [0,255]),OpenCV �ṩ�� cv.convertScaleAbs ���б�������(saturate): d s t = s a t u r a t e ( s r c ? �� + b e t a ) dst = saturate(src * \alpha + beta) dst=saturate(src?��+beta)��
����˵��:
cv.convertScaleAbs(src[, alpha[, beta]]) �� dst
����˵��:
- src:����ͼ��,�����ǻҶ�ͼ��,Ҳ�����Ƕ�ͨ���IJ�ɫͼ��
- dst:���ͼ��,��С�������� src ��ͬ
- alpha:����ϵ��,��ѡ��,Ĭ��ֵΪ 1
- beta:���ȵ���,��ѡ��,Ĭ��ֵΪ 0
���� 1.79:ͼ����:Sobel ����
# 1.79:ͼ����:Sobel ����
# img = cv2.imread("../images/Fig0338a.tif", flags=0) # NASA ����Ӱ��ͼ
img = cv2.imread("../images/imgGaia.tif", flags=0)
# ʹ�ú��� filter2D ʵ�� Sobel ����
kernSobelX = np.array([[-1, 0, 1], [-2, 0, 2], [-1, 0, 1]]) # SobelX kernel
kernSobelY = np.array([[-1, -2, -1], [0, 0, 0], [1, 2, 1]]) # SobelY kernel
imgSobelX = cv2.filter2D(img, -1, kernSobelX, borderType=cv2.BORDER_REFLECT)
imgSobelY = cv2.filter2D(img, -1, kernSobelY, borderType=cv2.BORDER_REFLECT)
# ʹ�� cv2.Sobel ʵ�� Sobel ����
SobelX = cv2.Sobel(img, cv2.CV_16S, 1, 0) # ���� x �᷽��
SobelY = cv2.Sobel(img, cv2.CV_16S, 0, 1) # ���� y �᷽��
absX = cv2.convertScaleAbs(SobelX) # ת�� uint8
absY = cv2.convertScaleAbs(SobelY) # ת�� uint8
SobelXY = cv2.addWeighted(absX, 0.5, absY, 0.5, 0) # �þ���ֵ����ƽ����
plt.figure(figsize=(10, 6))
plt.subplot(141), plt.axis('off'), plt.title("Original")
plt.imshow(img, cmap='gray', vmin=0, vmax=255)
plt.subplot(142), plt.axis('off'), plt.title("SobelX")
plt.imshow(SobelX, cmap='gray', vmin=0, vmax=255)
# plt.imshow(imgSobelX, cmap='gray', vmin=0, vmax=255)
plt.subplot(143), plt.axis('off'), plt.title("SobelY")
plt.imshow(SobelY, cmap='gray', vmin=0, vmax=255)
# plt.imshow(imgSobelY, cmap='gray', vmin=0, vmax=255)
plt.subplot(144), plt.axis('off'), plt.title("SobelXY")
plt.imshow(SobelXY, cmap='gray')
plt.tight_layout()
plt.show()
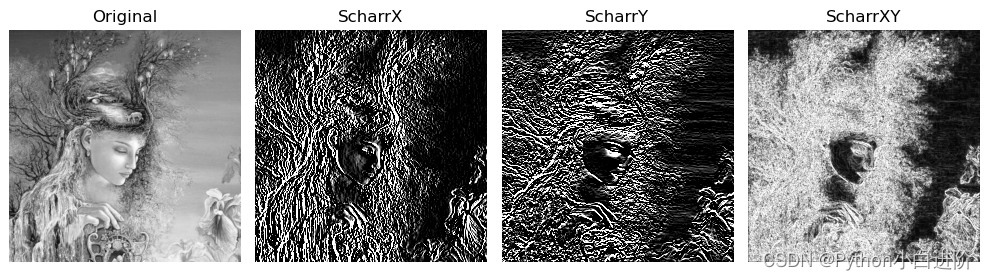
3.5 Scharr ����
Scharr ����Ҳ��Ϊ Scharr �˲���,���� x ��� y �᷽���ͼ���֡�
Scharr ������ Soble ������ ksize=3 ʱ���Ż�,�� Soble ���ٶ���ͬ,�Ҿ��ȸ��ߡ�Scharr ������ Sobel ���ӵIJ�ͬ������ƽ������,������Ԫ��ռ��Ȩ�ظ���,�൱��ʹ�ý�С����ĸ�˹����,Ҳ���Ǹ��ݸߵ�ģ�塣
Scharr ���ӵľ�����Ϊ:
G
x
=
[
?
3
0
3
?
10
0
10
?
3
0
3
]
,
?
G
y
=
[
?
3
10
?
3
0
0
10
3
10
3
]
G_x = \begin{bmatrix} -3 & 0 &3\\ -10 & 0 &10\\ -3 & 0 &3\\ \end{bmatrix}, \ G_y = \begin{bmatrix} -3 &10 &-3\\ 0 &0 &10\\ 3 &10 &3\\ \end{bmatrix}
Gx?=????3?10?3?000?3103????,?Gy?=????303?10010??3103????
Scharr ���Ӻ�����ͨ���������� cv.filter2D ʵ��,OpenCV Ҳ�ṩ�˺��� cv.Scharr ʵ�� Scharr ���ӡ�
����˵��:
cv.Scharr(src, ddepth, dx, dy[, dst[, scale[, delta[, borderType]]]]) �� dst
����˵��:
- src:����ͼ��
- dst:���ͼ��,��С�������� src ��ͬ
- ddepth:���ͼƬ���������,������ͼ�����Ƚ���ѡ��
- dx:x �᷽�����Ľ���
- dy:y �᷽�����Ľ���
- scale:���ű�������,��ѡ��,Ĭ��ֵΪ 1
- delta:���ͼ���ƫ����,��ѡ��,Ĭ��ֵΪ 0
- borderType:�߽����������,ע�ⲻ֧�ֶԲ����(BORDER_WRAP)
���� 1.80:ͼ����:Scharr ����
# 1.80:ͼ����:Scharr ����
# img = cv2.imread("../images/Fig0338a.tif", flags=0) # NASA ����Ӱ��ͼ
img = cv2.imread("../images/imgGaia.tif", flags=0)
# ʹ�ú��� filter2D ʵ�� Scharr ����
kernScharrX = np.array([[-3, 0, 3], [-10, 0, 10], [-3, 0, 3]]) # ScharrX kernel
kernScharrY = np.array([[-3, 10, -3], [0, 0, 10], [3, 10, 3]]) # ScharrY kernel
# ʹ�� cv2.Scharr ʵ�� Scharr ����
ScharrX = cv2.Scharr(img, cv2.CV_16S, 1, 0) # ���� x �᷽��
ScharrY = cv2.Scharr(img, cv2.CV_16S, 0, 1) # ���� y �᷽��
absX = cv2.convertScaleAbs(ScharrX) # ת�� uint8
absY = cv2.convertScaleAbs(ScharrY) # ת�� uint8
ScharrXY = cv2.addWeighted(absX, 0.5, absY, 0.5, 0) # �þ���ֵ����ƽ����
plt.figure(figsize=(10, 6))
plt.subplot(141), plt.axis('off'), plt.title("Original")
plt.imshow(img, cmap='gray', vmin=0, vmax=255)
plt.subplot(142), plt.axis('off'), plt.title("ScharrX")
plt.imshow(ScharrX, cmap='gray', vmin=0, vmax=255)
plt.subplot(143), plt.axis('off'), plt.title("ScharrY")
plt.imshow(ScharrY, cmap='gray', vmin=0, vmax=255)
plt.subplot(144), plt.axis('off'), plt.title("ScharrXY")
plt.imshow(ScharrXY, cmap='gray')
plt.tight_layout()
plt.show()
4. ��ͨ����ͨ�����衢��ͨ
ͼ���˲����ھ����ܱ���ͼ��ϸ�������������¶�Ŀ��ͼ���������������,�dz��õ�ͼ��Ԥ����������
�ռ����Ƶ���������˲������Է�Ϊ����:��ͨ�˲�������ͨ�˲�������ͨ�˲����ʹ����˲���,�������˲����������ɵ�ͨ�˲�������:
- ��ͨ�˲���: l p ( x , y ) lp(x,y) lp(x,y)
- ��ͨ�˲���: h p ( x , y ) = �� ( x , y ) ? l p ( x , y ) hp(x,y) = \delta(x,y) - lp(x,y) hp(x,y)=��(x,y)?lp(x,y)
- ��ͨ�˲���: b r ( x , y ) = l p 1 ( x , y ) + h p 2 ( x , y ) br(x,y) = lp_1(x,y) + hp_2(x,y) br(x,y)=lp1?(x,y)+hp2?(x,y)
- �����˲���: b p ( x , y ) = �� ( x , y ) ? b r ( x , y ) bp(x,y) = \delta(x,y) - br(x,y) bp(x,y)=��(x,y)?br(x,y)
��Щ���ݺ�����������һ����ͨ�˲������ݺ���ͨ�����Ա任�õ���
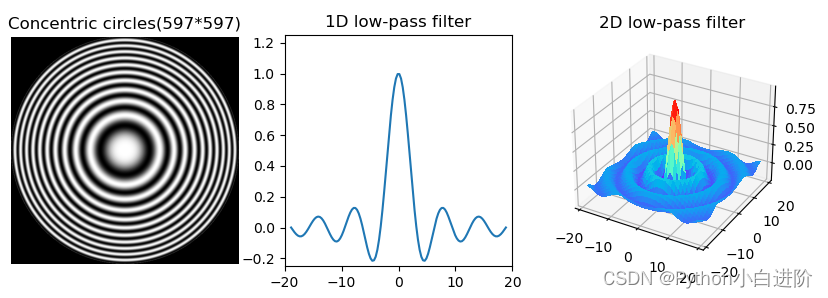
�������н���һά��ͨ�˲������ݺ���,�����������ɿռ��˲����ˡ�
��һ�������¹�ʽ������ͬ��Բ�����Ϊ��,�����˲�����������:
z
(
x
,
y
)
=
[
1
+
c
o
s
(
x
2
+
y
2
)
]
/
2
,
x
,
y
��
[
?
8.2
,
8.2
]
z(x,y) = [1 + cos(x^2+y2)]/2,\quad x,y \in [-8.2,8.2]
z(x,y)=[1+cos(x2+y2)]/2,x,y��[?8.2,8.2]
����,���һ��һά�ռ��ͨ�˲�������
x
=
s
i
n
(
x
)
/
x
,
x
��
[
?
6
��
,
6
��
]
x = sin(x) / x,\quad x \in [-6\pi,6\pi]
x=sin(x)/x,x��[?6��,6��]
���� 1.81:��ͨ/��ͨ,����/��ͨ
# 1.81:��ͨ/��ͨ,����/��ͨ
# ͬ��Բ�����
height, width = 597, 597
m = int((height-1) / 2) # 298
n = int((width-1) / 2) # 298
X = np.linspace(-8.2, 8.2, height) # ����:597
Y = np.linspace(-8.2, 8.2, width)
x, y = np.meshgrid(X, Y)
circle = 0.5 * (1 + np.cos(x**2 + y**2))
for i in range(circle.shape[0]):
for j in range(circle.shape[1]):
if np.sqrt((i-m)**2 + (j-n)**2) > m:
circle[i,j] = 0
# һά��ͨ�˲�������
hFilter, wFilter = 128, 128
mFilter = int((hFilter-1) / 2) # 63
nFilter = int((wFilter-1) / 2) # 63
x = np.linspace(-6*np.pi, 6*np.pi, hFilter) # ����:128
y = np.linspace(-6*np.pi, 6*np.pi, wFilter) # ����:128
scale = 1 # �˲�����������
xFilter = np.sin(x*scale) / x # 128
# ��ά��ͨ�˲�������
X, Y = np.meshgrid(x, y) # ����x��y��������
Z = np.sin(np.sqrt(X**2+Y**2)) / np.sqrt(X**2+Y**2)
plt.figure(figsize=(10, 3))
plt.subplot(131), plt.axis('off'), plt.title("Concentric circles(597*597)"), plt.imshow(circle, 'gray')
plt.subplot(132), plt.title("1D low-pass filter"), plt.plot(x, xFilter), plt.axis([-20,20,-0.25,1.25])
ax = plt.subplot(133, projection='3d')
surf = ax.plot_surface(X, Y, Z, cmap=plt.get_cmap("rainbow"), linewidth=0, antialiased=False)
ax.set_title("2D low-pass filter")
plt.show()
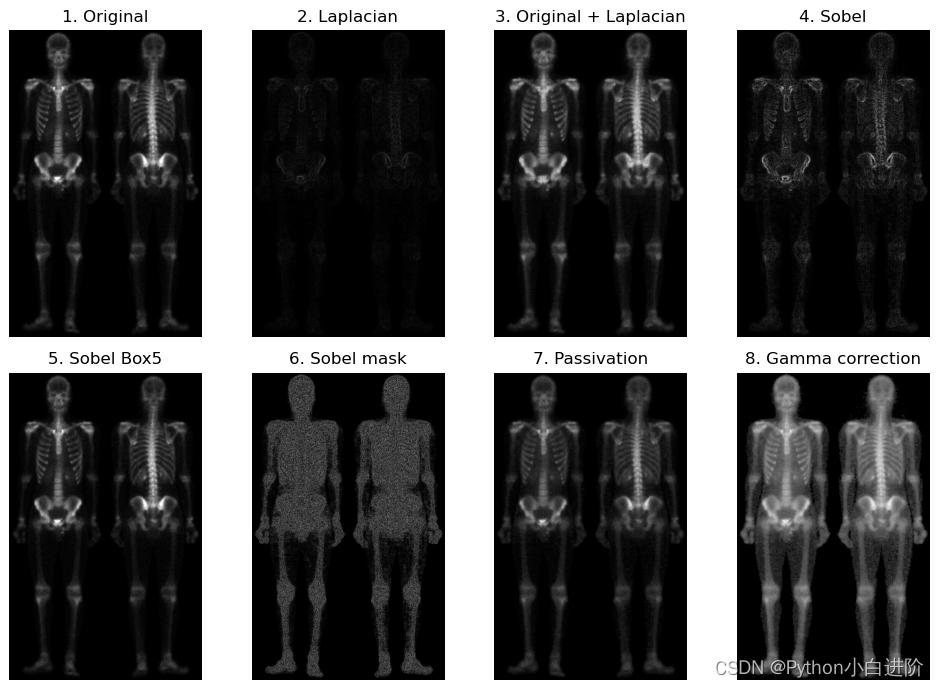
5. �ռ���ͼ����ǿ�������ۺ�Ӧ��
�ռ���ͼ����ǿ�ķ����ܶ�,���в�ͬ���ص�����á�����һ������ͼ��,����Ҫ����ͼ���ʵ�����,�ۺ�ʹ�ü���ͼ����ǿ�ķ���,�Ա�ﵽ��Ϊ����Ľ����
�������������ɨ��ͼ��(����G.E.MedicalSystem)Ϊ��,Ҫ���ͼ�����������ʾ����Ĺ���ϸ�ڡ�ԭʼͼ��ĻҶȼ��Ƚ���խ,����������,��ʹ��һ��ͼ����ǿ�������Դﵽ����Ľ��,��Ҫ�ۺ�Ӧ�ÿռ���ͼ����ǿ����:����ʹ��������˹�任ͻ��ϸ��,Ȼ��ʹ���ݶ�������ǿͻ���ı�Ե,��ʹ�õ�ͨ�˲�����������,�Դ�Ϊģ��õ���Ҫ����ͼ��,�����٤��У�������Ҷȼ��Ķ�̬��Χ�����岽������:
(1)������˹�任,ͻ��ԭʼͼ���ϸ��;
(2)ԭʼͼ�����������˹�任ͼ��,�ָ���������;
(3)Sobel �ݶ�����,��ǿͻ���ı�Ե;
(4)�ú�ʽ�˲���ƽ���ݶ�ͼ��;
(5)������˹��ƽ���ݶ���˵õ��ڱ�ģ��;
(6)ԭʼͼ�����ڱ�ģ�����,�õ���ͼ��;
(7)Gamma �任,����Ҷȼ��Ķ�̬��Χ��
���� 1.82 �ռ���ͼ����ǿ�������ۺ�Ӧ��
# 1.82 �ռ���ͼ����ǿ�������ۺ�Ӧ��
# ԭʼͼ��,�������ɨ��ͼ��
img = cv2.imread("../images/bonescan.tif", flags=0) # �������ɨ��ͼ��
# ͼ 2:������˹�任,ͻ��ϸ��
kernLaplace = np.array([[0, 1, 0], [1, -4, 1], [0, 1, 0]], np.int8) # Laplacian kernel
# kernLaplaceD = np.array([[1, 1, 1], [1, -8, 1], [1, 1, 1]], np.int8) # Diagonal Laplacian kernel
Laplacian = cv2.filter2D(img, ddepth=-1, kernel=kernLaplace)
imgLaplacian = np.uint8(cv2.normalize(Laplacian, None, 0, 255, cv2.NORM_MINMAX))
# ͼ 3:ԭʼͼ�� + ������˹�任,�ָ���������
AddLap = img + imgLaplacian
imgAddLap = np.uint8(cv2.normalize(AddLap, None, 0, 255, cv2.NORM_MINMAX))
# ͼ 4:Sobel �ݶ�����,��ǿͻ���ı�Ե
SobelX = cv2.Sobel(img, cv2.CV_16S, 1, 0) # ���� x �᷽��
SobelY = cv2.Sobel(img, cv2.CV_16S, 0, 1) # ���� y �᷽��
absX = cv2.convertScaleAbs(SobelX) # ת�� uint8
absY = cv2.convertScaleAbs(SobelY) # ת�� uint8
SobelXY = cv2.addWeighted(absX, 0.5, absY, 0.5, 0) # �þ���ֵ����ƽ����
imgSobel = np.uint8(cv2.normalize(SobelXY, None, 0, 255, cv2.NORM_MINMAX))
# ͼ 5:�� (5,5) ��ʽ�˲���ƽ���ݶ�ͼ��
kernelBox = np.ones(5, np.float32) / (5 * 5) # ���ɹ�һ����ʽ��
SobelBox = cv2.filter2D(img, -1, kernelBox) # cv2.filter2D ����
imgSobelBox = cv2.normalize(SobelBox, None, 0, 255, cv2.NORM_MINMAX)
# ͼ 6:ͼ2 �� ͼ5 ��˵õ�ģ�� mask,ͻ����ǿ��Ե,��Խϵ�������
mask = imgLaplacian * imgSobelBox
imgMask = np.uint8(cv2.normalize(mask, None, 0, 255, cv2.NORM_MINMAX))
# ͼ7:ԭʼͼ����ͼ 6 ���,�õ���ͼ��,��ϸ�ڸ�����
passivation = img + imgMask * 0.3
imgPassi = np.uint8(cv2.normalize(passivation, None, 0, 255, cv2.NORM_MINMAX))
# ͼ8: ���ɱ任(Gamma �任),����Ҷȼ��Ķ�̬��Χ
epsilon = 1e-5 # �dz�С��ֵ�Է����ֳ�0�����
# Gamma = np.zeros_like(imgPassi, dtype=np.float)
Gamma = np.power(imgPassi + epsilon, 0.5)
imgGamma = np.uint8(cv2.normalize(Gamma, None, 0, 255, cv2.NORM_MINMAX))
# ��ͼ
plt.figure(figsize=(10, 7))
titleList = ["1. Original", "2. Laplacian", "3. Original + Laplacian", "4. Sobel",
"5. Sobel Box5", "6. Sobel mask", "7. Passivation", "8. Gamma correction"]
imageList = [img, imgLaplacian, imgAddLap, imgSobel, imgSobelBox, imgMask, imgPassi, imgGamma]
for i in range(8):
plt.subplot(2,4,i+1), plt.title(titleList[i]), plt.axis('off')
plt.imshow(imageList[i], 'gray', vmin=0, vmax=255)
plt.tight_layout()
plt.show()
��Ȩ����:
��ӭ��ע��Python С�״��㿪ʼ OpenCV ѧϰ�� @ youcans�� ԭ����Ʒ
�����в���ԭʼͼƬ���� Rafael C. Gonzalez ��Digital Image Processing, 4th.Ed.��,�ش���л��
ԭ����Ʒ,ת�ر����עԭ������:https://blog.csdn.net/youcans/article/details/121422046
Copyright 2021 youcans, XUPT
Crated:2021-12-05
��ӭ��ע ��PythonС�״��㿪ʼ OpenCV ѧϰ�Ρ� ϵ��,��������
Python ��״��㿪ʼ OpenCV ѧϰ��-1.��װ�뻷������
Python ��״��㿪ʼ OpenCV ѧϰ��-2.ͼ���ȡ����ʾ
Python ��״��㿪ʼ OpenCV ѧϰ��-3.ͼ��Ĵ�������
Python ��״��㿪ʼ OpenCV ѧϰ��-4.ͼ��ĵ�������
Python ��״��㿪ʼ OpenCV ѧϰ��-5.ͼ��ļ��α任
Python ��״��㿪ʼ OpenCV ѧϰ��-6. �Ҷȱ任��ֱ��ͼ����
Python ��״��㿪ʼ OpenCV ѧϰ��-7. �ռ���ͼ���˲�