蓝色
紫色
红色
On the Two-View Geometry of Unsynchronized Cameras
不同步相机的双视图几何
Code: TwoViewUnsynch
Abstract
研究背景:
??许多计算机视觉应用,例如 人体建模 ,人物跟踪,姿势估计,机器人导航 和3D物体扫描 ,都受益于使用 多摄像头 系统。在 严格控制 的实验室设置中,可以使所有相机 在时间上 同步。然而,当相机可能在 没有同步 的情况下运行时,多相机系统的适用性可以大大扩大。同步有时是不可能的,例如在汽车行业,但即使有可能,使用 异步相机 也可能产生其他好处,例如,降低带宽要求和提高事件检测和运动恢复的时间分辨率。【相机拍摄时是不同步的[一般情况下],我们可以通过后期来实现同步】
Related Work
??许多视频和/或图像序列同步方法 基于图像内容分析 ,或通过 音轨 同步视频 ,因此其适用性有限。其他方法采用 压缩视频比特率配置文件 和 静止相机闪光灯 。这些方法在 时间变换模型 中有所不同。通常,使用 时移 或 时移与可变帧速率 结合使用。
??许多方法都有类似的基础。在每个视频序列中,使用兴趣点检测器和关联规则 或 2D跟踪器 检测一组 轨迹。轨迹是 跨序列 匹配的。基于RANSAC的算法通常用于 联合或以迭代方式 估计时间和空间变换的参数。在[7]中,RANSAC用于在 序列对中所有轨迹组合的滤波集中 搜索匹配的轨迹对(必须提供外极几何形状)。方法[22] 通过在RANSAC框架中拟合 单个N维线(时间轴)来实现 长度为N的序列的 联合同步。算法 [2] 基于 暂定轨迹匹配 来估计时空变换。
??已经有了使用 穷竭搜索 来寻找H [32] 或 同时估计H/F和时移[33] 的方法。这些方法在 整个空间里 搜索可能的时移。
??与我们最密切相关的两个工作是 [21,20],它们联合估计了 两视图几何 以及 近似的图像点轨迹 的时移。在[21]中,使用 非线性最小二乘法 估计了F/H以及时移,通过 直线 逼近图像轨迹。该算法由 7pt 算法 [14] 和零时移 初始化。工作[20] 通过估计 帧速率的差异 并使用 样条曲线(splines) 而不是直线来做逼近 来扩展这种方法。上述两个工作只有在给出 好的初始化值时 才能获得 好的结果,例如,在时移小于0.5s且没有严重匹配错误的序列上。
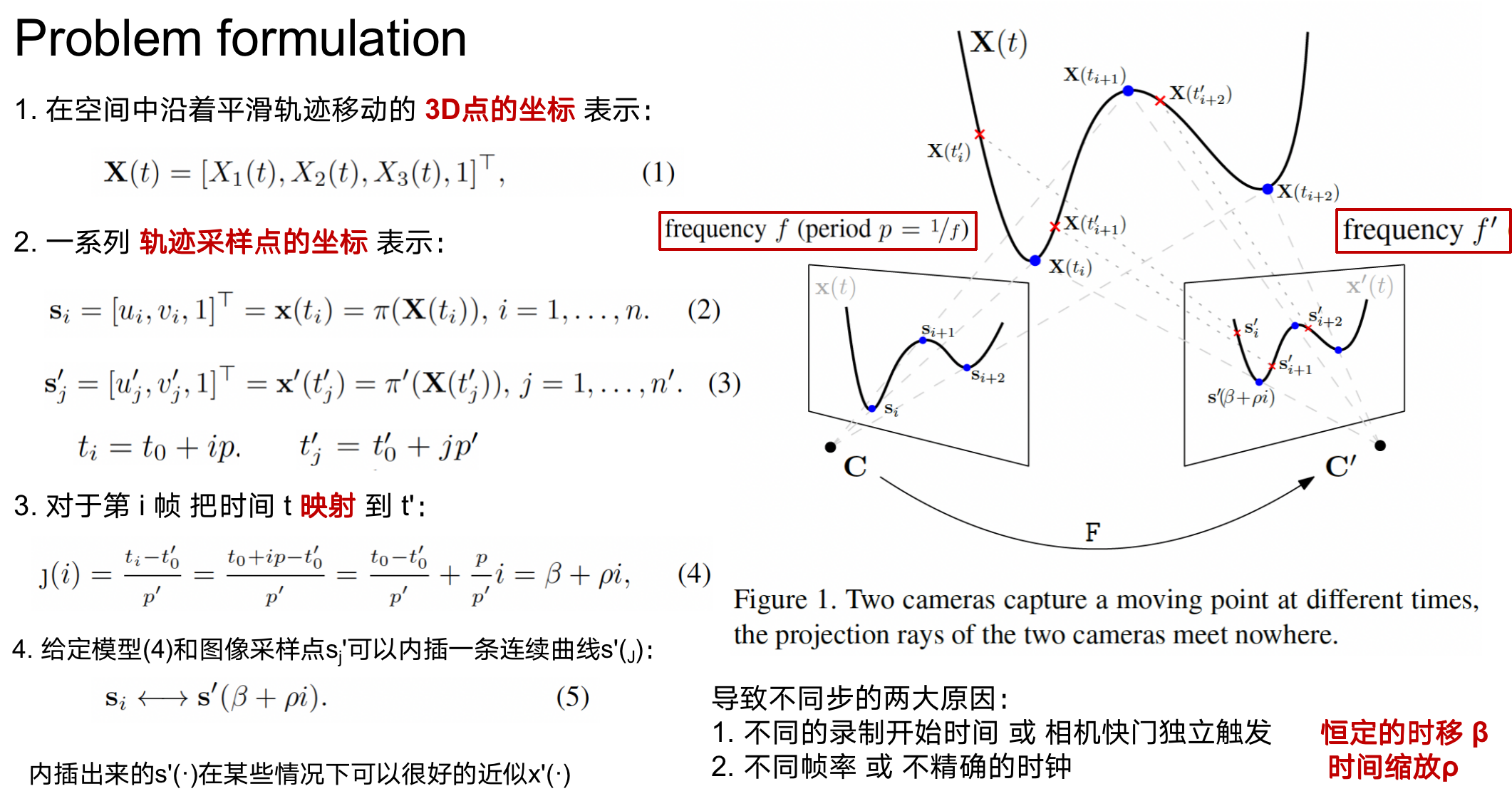
2. 通常,
s
i
s_i
si?和
s
j
′
s_j'
sj′?之间是没有对应关系的,即 对于
i
=
j
i=j
i=j,
s
i
s_i
si?和
s
j
′
s_j'
sj′?并不表示 同一3D点 的投影。
?
4. 尽管假设在 几分之一秒内 已知时移 似乎是合理的,但在实践中,时间戳通常基于 CPU时钟 ,这与 启动延迟 一起可能导致时移以秒为单位。另一方面,时间缩放 更常为人所知,或者可以 精确计算。
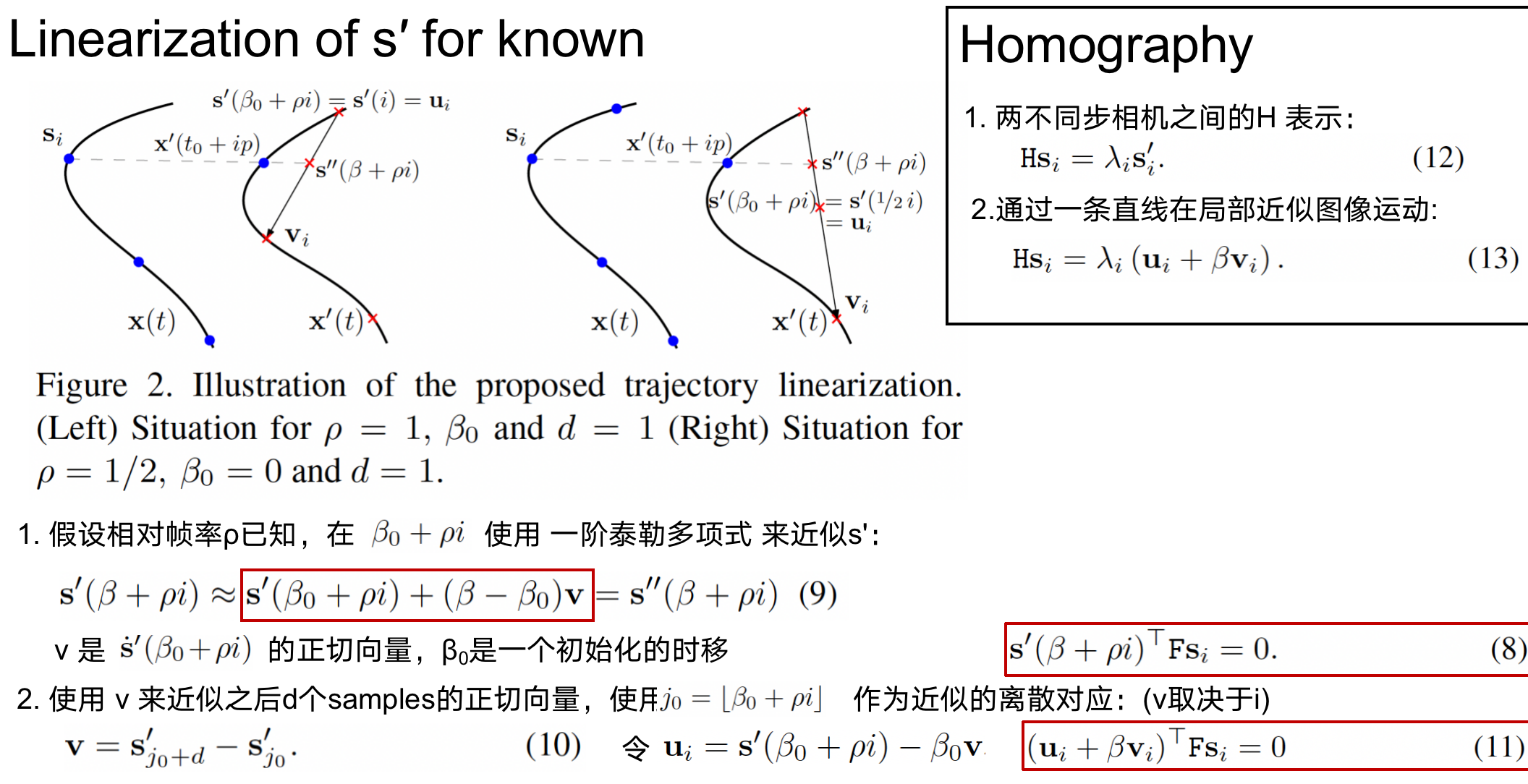
在文章的剩下部分,我们假设 f = f ′ f=f' f=f′ 和 初始估计 β 0 = 0 β_0=0 β0?=0
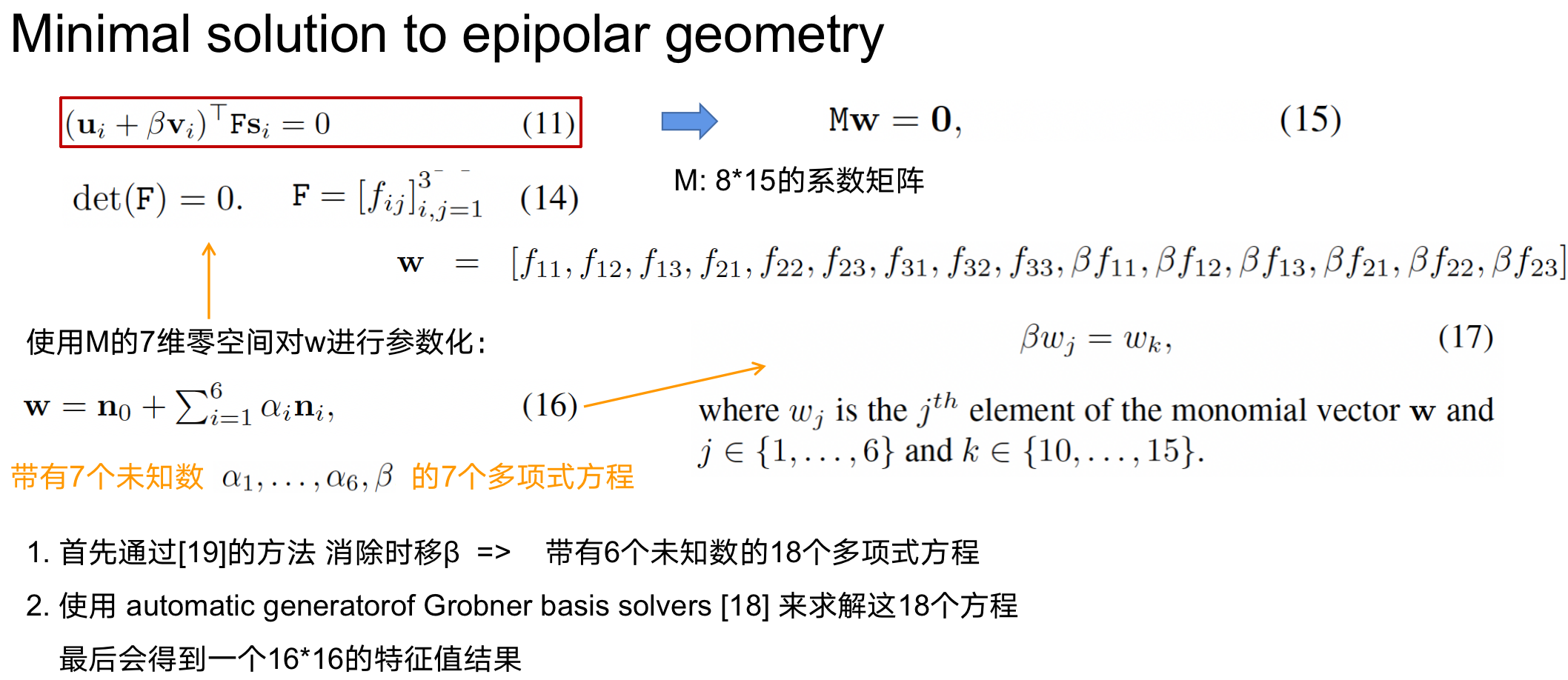
Solving the equations

Using RANSAC
??RANSAC对于我们的solvers是非常重要的,因为我们的 minimal solvers 对 噪声和外点 很敏感。
??数据中的outliers通常来源于两个方面:
??1. 误匹配和误检测
??2. 点轨迹的非线性
??即使没有因为错误检测而产生严重的异常值,在内插曲线轨迹不直的地方 仍然会存在关于模型的外点。因此,即使我们确定 对应点是精确的,使用RANSAC还是有益的。
??通过使用RANSAC,我们避免了轨迹的那些部分,并选择了 速度近似为直线和线性 的部分。基本上,我们只需要采样 轨迹的8(F)或5(H)部分,其中这个假设帮助获得一个好的模型,即使轨迹的其余部分是高度非线性的。
Real data experiments
Conclution
??本文提出了用于 同时估计 来自 不同步相机 的图像序列之间的 极几何或单应矩阵 和 时移 的求解器。这是这些问题的 最小解决方案 ,使得他们能够适合使用RANSAC进行鲁棒估计。我们的方法只需要图像中 移动点的轨迹 ,这些轨迹很容易通过最先进的方法提供,例如SIFT匹配,人体姿势探测器或行人跟踪器。我们能够使用单个 RANSAC的求解器 同步 由几帧移动构成的各种真实世界数据集。对于较大的时移,我们提出了一种连续使用这些求解器的 迭代算法。迭代算法被证明足够可靠,可以同步现实世界的摄像头设置,包括自动驾驶汽车、监控视频和体育比赛记录,这些视频是有 几秒不同步的。