各位小伙伴大家好,现在移动机器人这么火热,大到无人驾驶车,规矩的有工业上应用得很多的AGV(比如智能物流自动搬运机器人),小到淘宝上面的智能小车,都可以算作移动机器人。移动机器人有各种各样的底盘,有两轮的三轮的四轮的,比如无人车是四轮的阿克曼模型,一般的AGV是两轮差速模型,还有大学生机器人竞赛里面常见的三轮全向轮底盘,四轮全向轮底盘,还有一些AGV是四轮滑移底盘,是不是有点让人眼花缭乱的感觉呢;本节将从运动学方面介绍limo的四种运动模式。如果错过之前的内容的话你可以通过以下链接进行访问:
松灵机器人多模态ROS开发平台LIMO使用指引(三)_m0_64152879的博客-CSDN博客
松灵机器人多模态ROS开发平台LIMO使用指引(二)_m0_64152879的博客-CSDN博客?
?松灵机器人多模态ROS开发平台LIMO使用指引(一)_m0_64152879的博客-CSDN博客
4.1 四轮差速运动模式
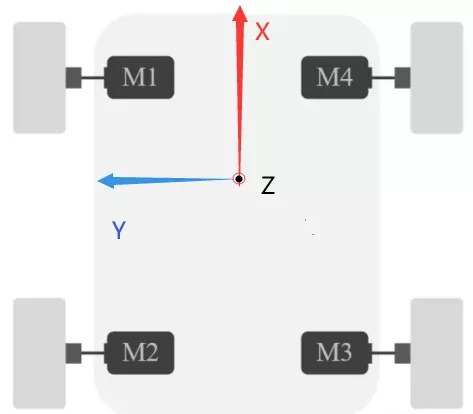
我们把一台四轮差速运动的机器人简化成下图的模型,其中四个车轮由四个单独的电机驱动,只需要控制四个车轮的速度,就可以达到控制机器人的前进、后退、以及转向的运动效果了。
?
我们给机器人一个参考坐标系,红色箭头为X正方向,蓝色箭头为Y轴正方向,Z轴沿着原点垂直屏幕向外,坐标原点为机器人的质心,坐标系满足安培右手定则。当四个车轮的速度(大小+方向)一样时,机器人就可以实现前进和后退。当四个车轮的速度不一样时,机器人将会产生转向运动。
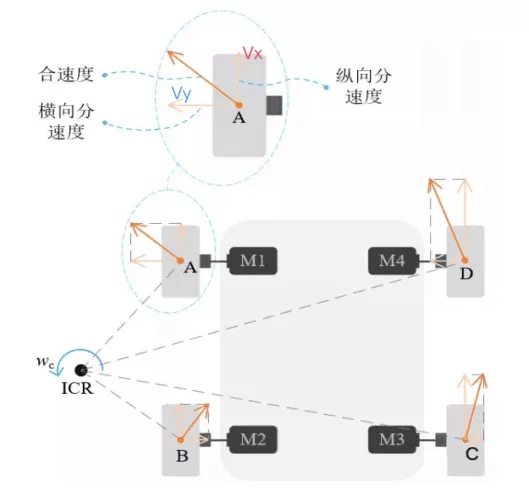
一旦机器人产生转向运动,那么意味着有一个转向中心即下图中的点ICR。以左前轮为例,轮子与地面接触点A的相对运动速度方向如图所示,合速度方向与线段A-ICR相互垂直,而轮胎只能沿着纵向分速度方向转动,做速度分解可知,还存在沿轮子轴向(电机轴向)的横向分速度。
?
由于四个轮胎的横向分速度大小不同,因此机器人会产生旋转分运动,而纵向分速度产生纵向分运动,合成运动则表现为机器人绕ICR做圆周运动。
在机器人转弯时,两侧的轮胎角速度一样,内侧的轮胎转弯半径小,所以线速度更小,外侧的轮胎转弯半径大,所以外侧线速度更大。即右侧速度大时,将会向左转,同理可知,左侧速度大时,将会向右转。
而且从上图可以看出同侧的轮胎Vx(纵向分速度)一样,上(下)端的轮胎Vy(横向分速度)一样。如果想要绕自身自转的话,只需要左(右)侧的两个车轮速度一样大,且方向相同、右(左)侧的两个车轮速度与另一侧一样,但方向与另一侧相反即可。
我们可以尝试控制四轮差速模式下的limo,首先把limo调整为四轮差速模式, 拔起来顺时针转30度,使两插销上较短的线指向车体正前方

,此时为插入状态,微调轮胎角度对准孔位让插销插入,车灯变为黄色则切换成功。
模式切换成功之后,运行以下命令,我们就可以启用键盘或者手柄来控制。
启动底盘控制节点
roslaunch limo_base limo_base.launch
启动键盘控制节点
roslaunch limo_bringup limo_teletop_keyboard.launch ?
4.2 履带运动模式
履带差速模式下单侧履带可等效视为“无穷多个小轮子”,且这单侧的“无穷多个小轮子”的“转速”是一致的。所以,履带差速模式的转向方式和四轮差速模式的转向方式是一致的,也是滑动转向。
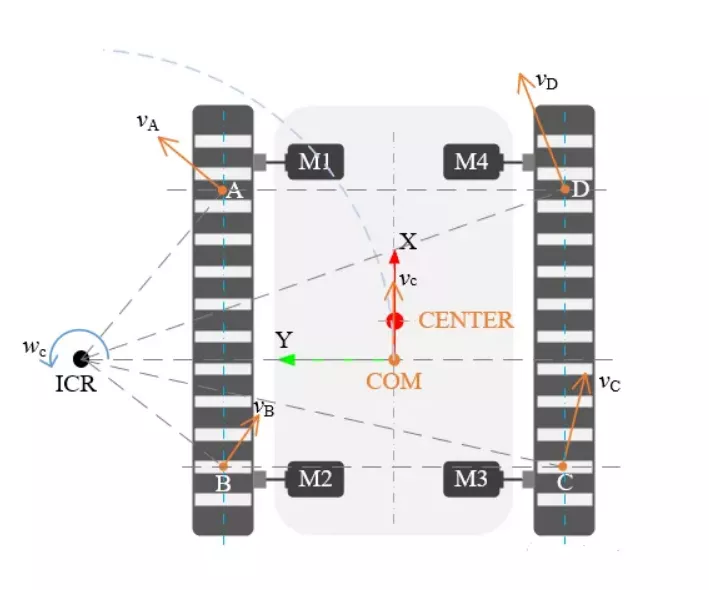
具体来讲,履带差速运动和四轮差速运动均是通过控制两侧履带(或轮子)的相对速度实现,但二者也有区别:履带对地面产生的剪切和压力分布,是不同于轮子的。此区别体现在车轮速度控制上时影响不大。车轮速度不一致时,我们参照可以以下简化后的模型
?
ICR为运动旋转中心,CENTER为机器人几何学中心,COM为机器人质心。转弯时,内侧履带的速度小于外侧履带的速度,如果想要绕自身自转的话,只需要左(右)侧履带速度一样大,且方向相同、右(左)侧的履带速度与另一侧一样,但方向与另一侧相反即可。
在四轮差速模式下将履带直接套上,建议先套空间较小的后轮,并且履带模式下请将两侧车门抬起防止剐蹭。
更换完成之后,运行以下命令,我们就可以启用键盘或者手柄来控制。
启动底盘控制节点
?roslaunch limo_base limo_base.launch
?启动键盘控制节点
roslaunch limo_bringup limo_teletop_keyboard.launch ?
4.3 阿克曼运动模式
阿克曼转向结构是现代汽车的转向方式,可以解决汽车在转向时,由于左、右转向轮的转向半径不同所造成的左、右转向轮转角不同的问题。
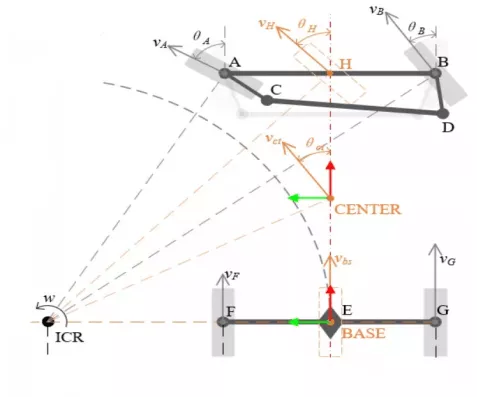
首先看一下阿克曼运动模态简化之后的模型图。与差速运动相同,如果我们给四个车轮相同的的速度(大小+方向),即可实现机器人的前进和后退。不同之处在于转弯,需要根据前端两个车轮的偏转方向,利用阿克曼转向几何来计算转弯半径。点CENTER为机器人几何中心,点BASE为后杆的中点。此时,机器人将绕ICR做圆周运动,此转弯半径也为最小转弯半径。由图可知,前段两个车轮的偏角并不一致,两个车轮偏角的差值(θA-θB)为阿克曼角。如果机器人在阿克曼运动模式下还是采用四轮驱动的方式,在转弯时,内侧车轮的速度小于外侧车轮。
?
阿克曼进一步简化,就是平时我们骑得自行车模型,上图橘黄色部分是机器人等效的自行车模型。相比于差速运动模态,阿克曼运动模态有转弯半径的限制,移动机器人不能实现自旋,即转弯半径不能为0。
先将两侧插销拔起,顺时针转30度,使两插销上较长的线指向车体正前方?,

即可卡住,车灯变为绿色则切换成功,limo就变换为阿克曼运动模态了。
模式切换成功之后,运行以下命令,我们就可以启用键盘或者手柄来控制。
切换成功之后,运行以下命令,我们就可以启用键盘或者手柄来控制。
启动底盘控制节点
?roslaunch limo_base limo_base.launch
启动键盘控制节点
roslaunch limo_bringup limo_teletop_keyboard.launch ?
注:当在阿克曼模式下走不直时需要进行舵机校准,先将7通道拨到中间,然后用右遥控调整舵机角度,角度合适时将5通道向上拨两下即算校准,之后遥控小车判断是否能够在阿克曼模式下走直,如此反复,直到可以走直为准。
4.4 麦克纳姆运动模式
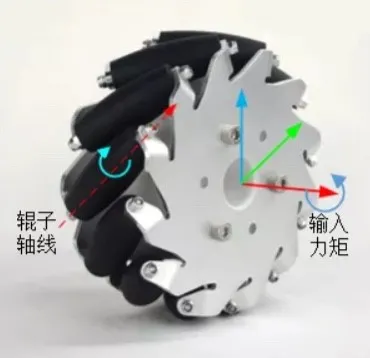
?麦克纳姆轮是一种特殊的车轮,由轮毂和辊子组成:轮毂是整个轮子的主体支架,辊子则是安装在轮毂上的被动运动的鼓状物(小轮),两者组成一个完整的大轮。市面上轮毂轴线与辊子转轴夹角大致可分30度、45度、60度三种。为满足全向运动的几何关系,轮毂边缘采用了折弯工艺,为辊子的转轴提供安装孔。
?
?
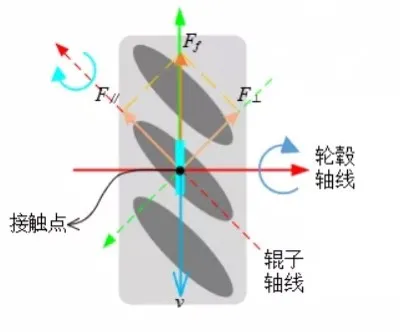
?假定车轮逆时针转动,对麦克纳姆轮进行受力分析,上图中坐标系红色表示x轴,绿色表示y轴,蓝色表示z轴,辊子坐标系用虚线表示,轮毂坐标系用实线表示;黄色箭头表示麦轮和辊子的受力分析;蓝色箭头表示速度方向。
麦轮外围的辊子是与地面接触的,当麦轮绕轮毂轴转动时,辊子会与地面产生摩擦力Ff,其作用力方向为轮毂坐标系Y轴正方向。对Ff沿着辊子坐标系做正交分解,F1沿辊子Y轴负方向,大小为√2/2Ff,FⅡ沿辊子X轴正方向,大小为√2/2Ff。F1为辊子的滚动摩擦力,对辊子造成磨损,并不能改变轮胎的运动方向,FⅡ会迫使辊子沿X轴正方向运动,故FⅡ为静摩擦,促使辊子相对地面运动。
?
?
?
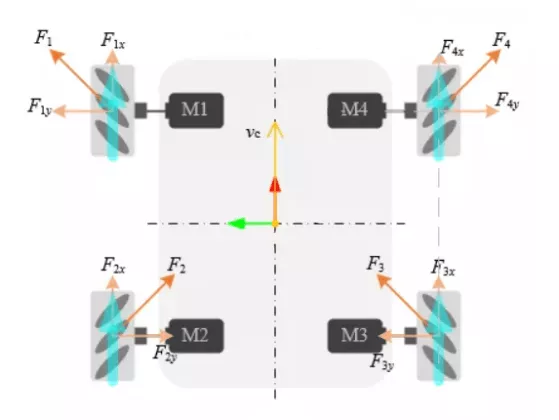
不同的车轮排列方式也需采用不同的控制方式,将麦轮的全向运动简化成上图这个模型,蓝色箭头表示车轮运动方向,橘黄色箭头表示麦轮的受力分析情况。将各力合并,我们将发现移动机器人只有一个向前的力,故此时机器人将向前运动。
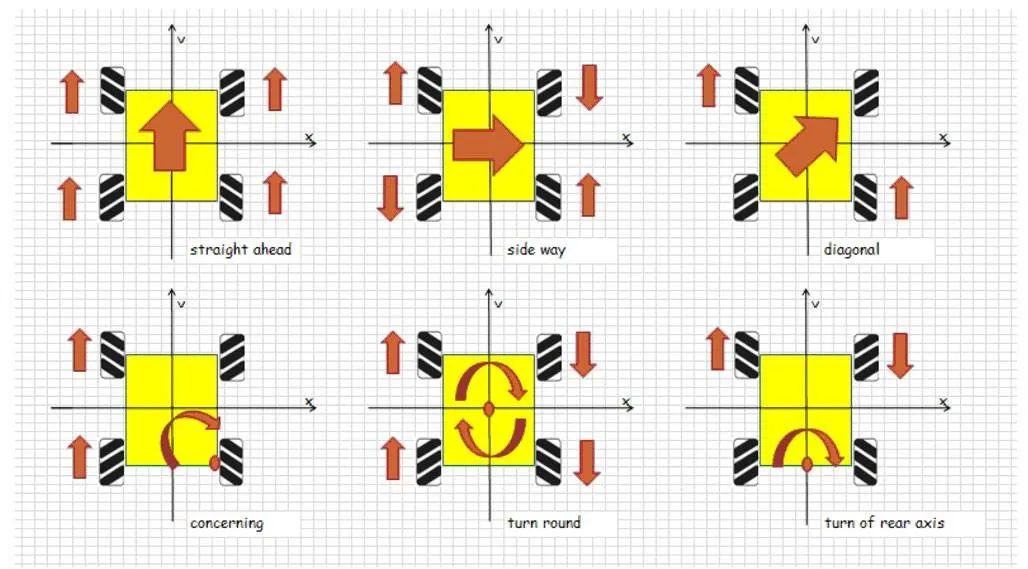
结合之前四轮差速运动模式,对各个轮胎的摩擦力进行合并,就可使机器人往任意方向去运动。下面列举一些不同方向运动时轮胎的状态。
?
先将轮毂盖和轮胎拆下,只保留轮毂电机,然后保证每个麦轮的小滚子朝向车体中心,用包装里的M3*5螺丝将麦轮安装上,最后需要用遥控/APP调整至麦轮模式。
遥控手柄在四轮差速控制模式下,通道8处于最下档时切换为麦轮控制模式,处于中上档时切回差速模式;
启动底盘控制节点
?roslaunch limo_base limo_base.launch
启动键盘控制节点?
roslaunch limo_bringup limo_teletop_keyboard.launch ?
?移动机器人的运动模态有很多,每一种都有其优缺点,在实际场景中我们可以根据场景特点和需求,选用最合适的运动模态。下表总结了四种运动模式的优缺点,仅供参看。
| 模态 | 四轮差速 | 履带 | 阿克曼 | 麦克纳姆 |
|---|---|---|---|---|
| 优点 | 运动性能好,控制简单 | 适应性强,适用于多种复杂场地 | 与汽车的运动模式相同,便于做深入的自动驾驶研究 | 机动性好,可以全向运动 |
| 缺点 | 转向有滑移,轮胎的磨损比较大 | 滑动转向阻力大,对履带的磨损较大 | 转弯半径有限,轮胎磨损小 | 场地要求较高,辊子间不连续,运动时有震动,磨损较大 |