这里我们要细分了,虽然
G
x
G_x
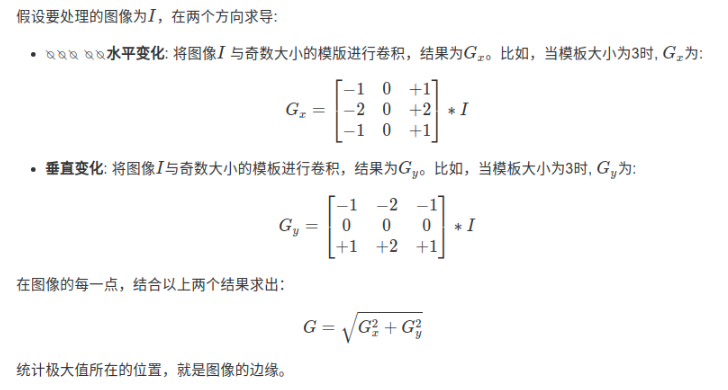
Gx?是对x求偏导得到,但是它反映的是在x方向上的三个像素值差异很大,那么假设黑色图像中一条白色竖线(有10行1列),那么卷积后:
- 在白色竖线以外左边相邻的那一列,他的 G x G_x Gx?值都很大,最大为255(超过255的被赋值为255);
- 在白色竖线的每一点,他的 G x G_x Gx?值都为0;
- 在白色竖线以外右边相邻的那一列,他的
G
x
G_x
Gx?值都为很大负数,会被赋值为0.
即,通过计算 G x G_x Gx?,可以知道这三列形成了一条白色竖线。所以 G x G_x Gx?是用来检测竖直边缘的。
同理, G y G_y Gy?是对y求偏导,它反映的是在y方向上的三个像素值差异很大,但是它是用来检测水平边缘的。
#include <math.h>
#include <iostream>
#include <string>
#include <vector>
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/opencv.hpp"
// g++ test.cpp `pkg-config opencv --libs --cflags` -std=c++11 -pthread -o test
int main() {
cv::Mat src = cv::Mat::zeros(500, 500, CV_8UC1);
cv::Mat dst = cv::Mat::zeros(500, 500, CV_8UC1);
for (int y = 0; y < src.rows; ++y) {
src.at<unsigned char>(y, 250) = 255;
}
for (int x = 0; x < src.cols; ++x) {
src.at<unsigned char>(250, x) = 255;
}
// cv::Mat src = cv::imread("pppp.png");
// cv::cvtColor(src, src, cv::COLOR_BGR2GRAY);
// cv::Mat dst = src.clone();
cv::imshow("Image of src", src);
cv::Mat kernel_x = (cv::Mat_<char>(3, 3) << -1, 0, 1, -2, 0, 2, -1, 0, 1);
cv::Mat kernel_y = (cv::Mat_<char>(3, 3) << -1, -2, -1, 0, 0, 0, 1, 2, 1);
cv::Mat dst_x, dst_y;
cv::filter2D(src, dst_x, CV_8UC3, kernel_x);
cv::filter2D(src, dst_y, CV_8UC3, kernel_y);
cv::imshow("Image of sobel x", dst_x);
cv::imshow("Image of sobel y", dst_y);
cv::imshow("Image of sobel x+y", dst_x + dst_y);
//梯度
for (int i = 0; i < dst_x.cols; ++i) {
for (int j = 0; j < dst_x.rows; ++j) {
dst.at<uchar>(j, i) = std::sqrt(std::pow(dst_x.at<uchar>(j, i), 2) +
std::pow(dst_y.at<uchar>(j, i), 2));
}
}
cv::imshow("Image of sobel 梯度", dst);
while (cv::waitKey(0) != 'q') {
};
return 0;
}
原始图:

通过
G
x
G_x
Gx?计算得到:

通过
G
y
G_y
Gy?计算得到:

通过 G x + G y G_x+G_y Gx?+Gy?计算得到:

通过
G
x
2
+
G
y
2
{G_x}^2+{G_y}^2
Gx?2+Gy?2计算梯度得到:

#include <iostream>
#include <string>
#include <vector>
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/opencv.hpp"
// g++ test.cpp `pkg-config opencv --libs --cflags` -std=c++11 -pthread -o test
int main() {
cv::Mat src = cv::imread("pppp.png");
// cv::cvtColor(src, src, cv::COLOR_BGR2GRAY);
cv::imshow("Image of src", src);
cv::Mat dst=src.clone();
cv::Mat kernel_x = (cv::Mat_<char>(3, 3) << -1, -2, -1, 0, 0, 0, 1, 2, 1);
cv::Mat kernel_y = (cv::Mat_<char>(3, 3) << -1, 0, 1, -2, 0, 2, -1, 0, 1);
cv::Mat dst_x, dst_y;
cv::filter2D(src, dst_x, CV_8UC3, kernel_x);
cv::filter2D(src, dst_y, CV_8UC3, kernel_y);
cv::imshow("Image of sobel x", dst_x);
cv::imshow("Image of sobel y", dst_y);
cv::imshow("Image of sobel x+y", dst_x + dst_y);
//梯度
for (int i = 0; i < dst_x.cols; ++i) {
for (int j = 0; j < dst_x.rows; ++j) {
dst.at<uchar>(j, i) = std::sqrt(std::pow(dst_x.at<uchar>(j, i), 2) +
std::pow(dst_y.at<uchar>(j, i), 2));
}
}
cv::imshow("Image of sobel 梯度", dst);
while (cv::waitKey(0) != 'q') {
};
return 0;
}
origin:

sobel_x:

sobel_y:

sobel x+y :

通过
G
x
2
+
G
y
2
{G_x}^2+{G_y}^2
Gx?2+Gy?2计算梯度得到:
