目录
一、Section #1 - Basics
1.basic_functions
#pylint:disable=no-member
import cv2 as cv
# Read in an image
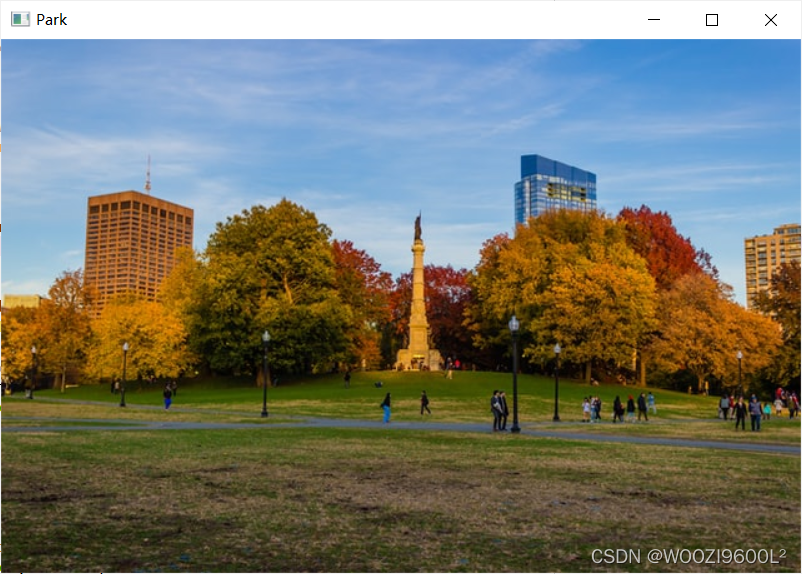
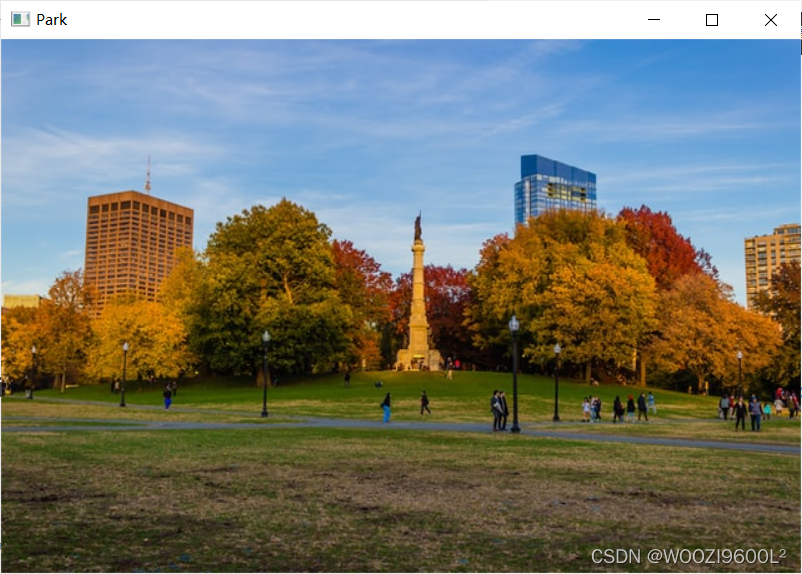
img = cv.imread('../Resources/Photos/park.jpg')
cv.imshow('Park', img)
# Converting to grayscale
gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
cv.imshow('Gray', gray)
# Blur
blur = cv.GaussianBlur(img, (7,7), cv.BORDER_DEFAULT)
cv.imshow('Blur', blur)
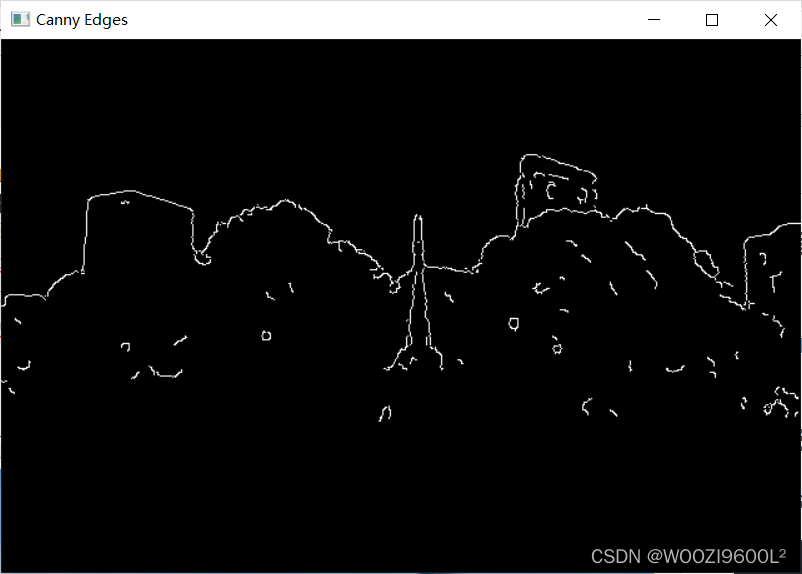
# Edge Cascade
canny = cv.Canny(blur, 125, 175)
cv.imshow('Canny Edges', canny)
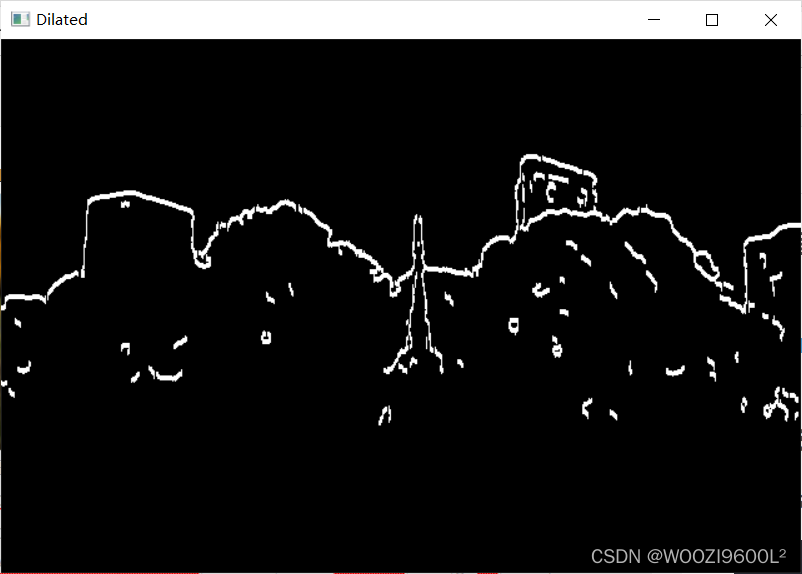
# Dilating the image
dilated = cv.dilate(canny, (7,7), iterations=3)
cv.imshow('Dilated', dilated)
# Eroding
eroded = cv.erode(dilated, (7,7), iterations=3)
cv.imshow('Eroded', eroded)
# Resize
resized = cv.resize(img, (500,500), interpolation=cv.INTER_CUBIC)
cv.imshow('Resized', resized)
# Cropping
cropped = img[50:200, 200:400]
cv.imshow('Cropped', cropped)
cv.waitKey(0)


2.contours
#pylint:disable=no-member
import cv2 as cv
import numpy as np
img = cv.imread('../Resources/Photos/cats.jpg')
cv.imshow('Cats', img)
blank = np.zeros(img.shape, dtype='uint8')
cv.imshow('Blank', blank)
gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
cv.imshow('Gray', gray)
blur = cv.GaussianBlur(gray, (5,5), cv.BORDER_DEFAULT)
cv.imshow('Blur', blur)
canny = cv.Canny(blur, 125, 175)
cv.imshow('Canny Edges', canny)
# ret, thresh = cv.threshold(gray, 125, 255, cv.THRESH_BINARY)
# cv.imshow('Thresh', thresh)
contours, hierarchies = cv.findContours(canny, cv.RETR_LIST, cv.CHAIN_APPROX_SIMPLE)
print(f'{len(contours)} contour(s) found!')
cv.drawContours(blank, contours, -1, (0,0,255), 1)
cv.imshow('Contours Drawn', blank)
cv.waitKey(0)



3.draw
#pylint:disable=no-member
import cv2 as cv
import numpy as np
blank = np.zeros((500,500,3), dtype='uint8')
cv.imshow('Blank', blank)
# 1. Paint the image a certain colour
blank[200:300, 300:400] = 0,0,255
cv.imshow('Green', blank)
# 2. Draw a Rectangle
cv.rectangle(blank, (0,0), (blank.shape[1]//2, blank.shape[0]//2), (0,255,0), thickness=-1)
cv.imshow('Rectangle', blank)
# 3. Draw A circle
cv.circle(blank, (blank.shape[1]//2, blank.shape[0]//2), 40, (0,0,255), thickness=-1)
cv.imshow('Circle', blank)
# 4. Draw a line
cv.line(blank, (100,250), (300,400), (255,255,255), thickness=3)
cv.imshow('Line', blank)
# 5. Write text
cv.putText(blank, 'Hello, my name is Jason!!!', (0,225), cv.FONT_HERSHEY_TRIPLEX, 1.0, (0,255,0), 2)
cv.imshow('Text', blank)
cv.waitKey(0)
4.read
#pylint:disable=no-member
import cv2 as cv
img = cv.imread('../Resources/Photos/cats.jpg')
cv.imshow('Cats', img)
cv.waitKey(0)
# Reading Videos
capture = cv.VideoCapture('../Resources/Videos/dog.mp4')
while True:
isTrue, frame = capture.read()
# if cv.waitKey(20) & 0xFF==ord('d'):
# This is the preferred way - if `isTrue` is false (the frame could
# not be read, or we're at the end of the video), we immediately
# break from the loop.
if isTrue:
cv.imshow('Video', frame)
if cv.waitKey(20) & 0xFF==ord('d'):
break
else:
break
capture.release()
cv.destroyAllWindows()

5.thresh
#pylint:disable=no-member
import cv2 as cv
img = cv.imread('../Resources/Photos/cats.jpg')
cv.imshow('Cats', img)
gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
cv.imshow('Gray', gray)
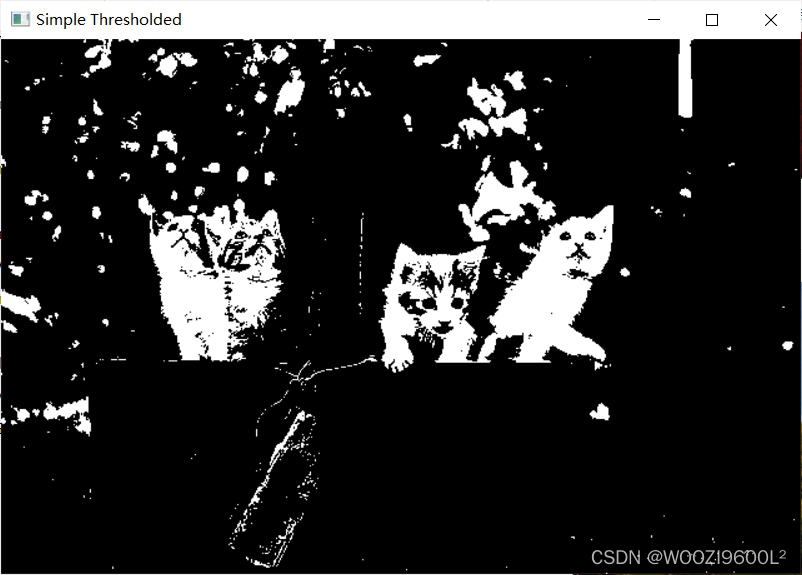
# Simple Thresholding
threshold, thresh = cv.threshold(gray, 150, 255, cv.THRESH_BINARY )
cv.imshow('Simple Thresholded', thresh)
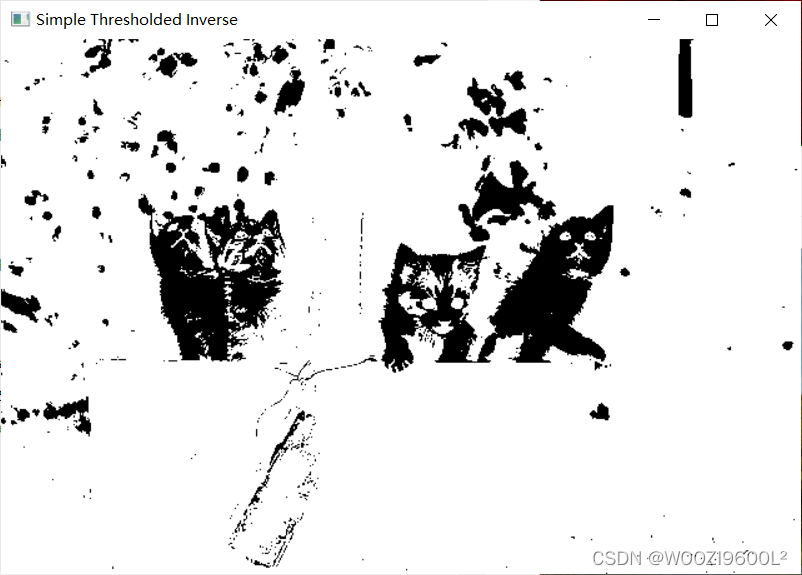
threshold, thresh_inv = cv.threshold(gray, 150, 255, cv.THRESH_BINARY_INV )
cv.imshow('Simple Thresholded Inverse', thresh_inv)
# Adaptive Thresholding
adaptive_thresh = cv.adaptiveThreshold(gray, 255, cv.ADAPTIVE_THRESH_GAUSSIAN_C, cv.THRESH_BINARY_INV, 11, 9)
cv.imshow('Adaptive Thresholding', adaptive_thresh)
cv.waitKey(0)


6.transformations
#pylint:disable=no-member
import cv2 as cv
import numpy as np
img = cv.imread('../Resources/Photos/park.jpg')
cv.imshow('Park', img)
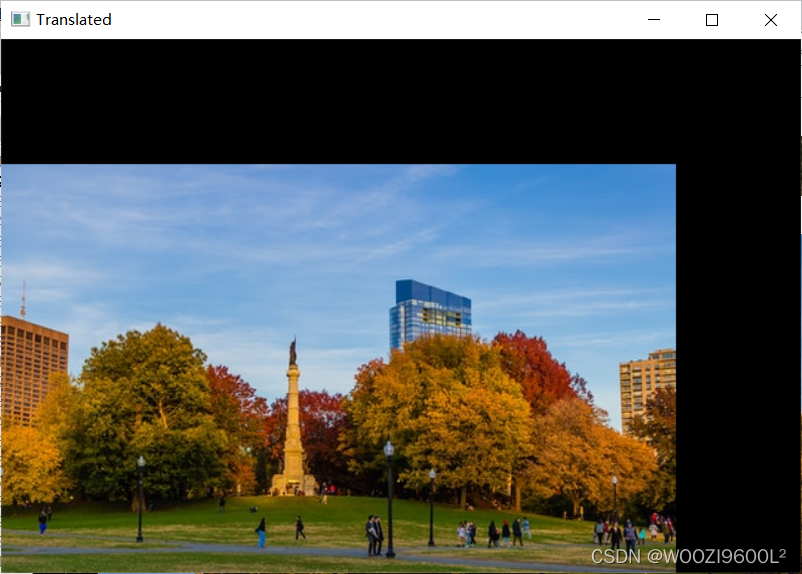
# Translation
def translate(img, x, y):
transMat = np.float32([[1,0,x],[0,1,y]])
dimensions = (img.shape[1], img.shape[0])
return cv.warpAffine(img, transMat, dimensions)
# -x --> Left
# -y --> Up
# x --> Right
# y --> Down
translated = translate(img, -100, 100)
cv.imshow('Translated', translated)
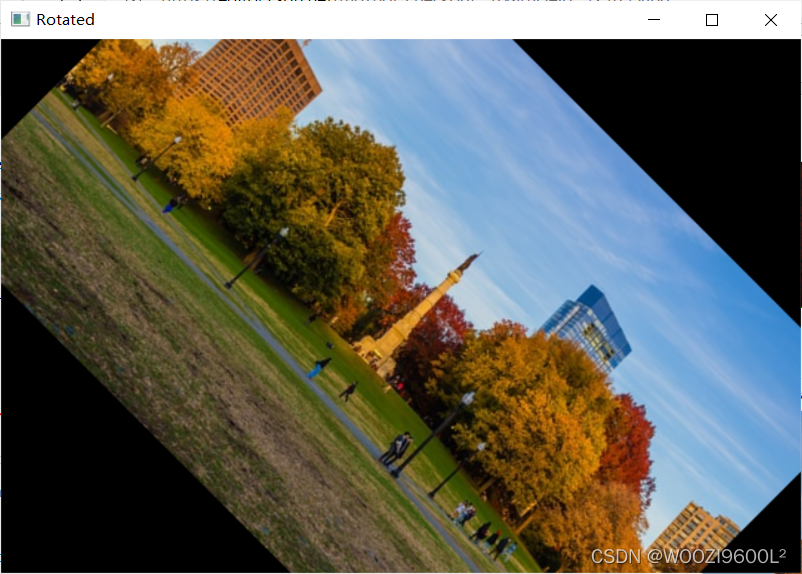
# Rotation
def rotate(img, angle, rotPoint=None):
(height,width) = img.shape[:2]
if rotPoint is None:
rotPoint = (width//2,height//2)
rotMat = cv.getRotationMatrix2D(rotPoint, angle, 1.0)
dimensions = (width,height)
return cv.warpAffine(img, rotMat, dimensions)
rotated = rotate(img, -45)
cv.imshow('Rotated', rotated)
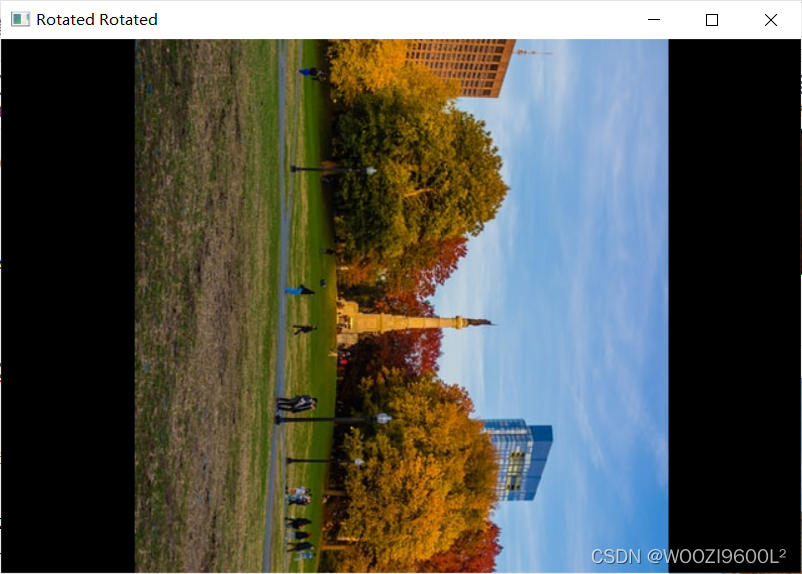
rotated_rotated = rotate(img, -90)
cv.imshow('Rotated Rotated', rotated_rotated)
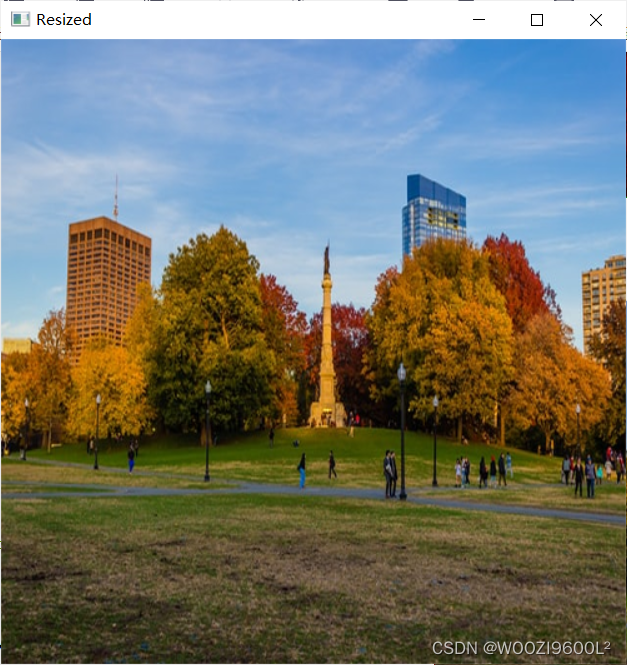
# Resizing
resized = cv.resize(img, (500,500), interpolation=cv.INTER_CUBIC)
cv.imshow('Resized', resized)
# Flipping
flip = cv.flip(img, -1)
cv.imshow('Flip', flip)
# Cropping
cropped = img[200:400, 300:400]
cv.imshow('Cropped', cropped)
cv.waitKey(0)

二、Section #2 - Advanced
1.bitwise
#pylint:disable=no-member
import cv2 as cv
import numpy as np
blank = np.zeros((400,400), dtype='uint8')
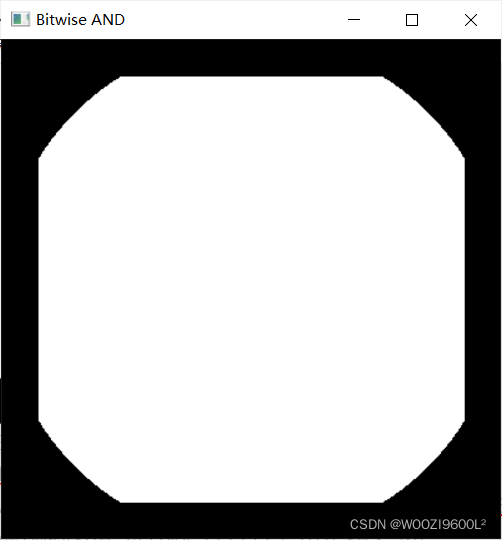
rectangle = cv.rectangle(blank.copy(), (30,30), (370,370), 255, -1)
circle = cv.circle(blank.copy(), (200,200), 200, 255, -1)
cv.imshow('Rectangle', rectangle)
cv.imshow('Circle', circle)
# bitwise AND --> intersecting regions
bitwise_and = cv.bitwise_and(rectangle, circle)
cv.imshow('Bitwise AND', bitwise_and)
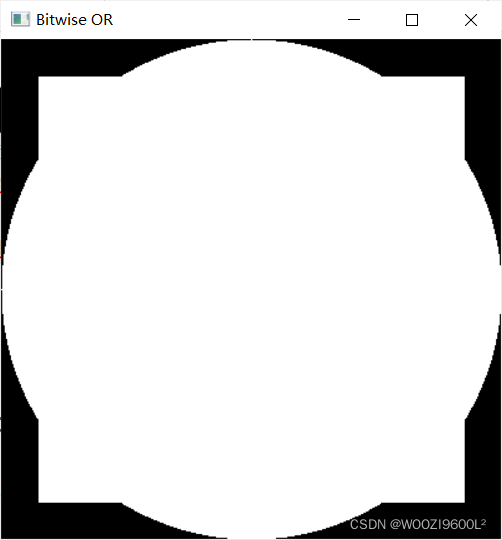
# bitwise OR --> non-intersecting and intersecting regions
bitwise_or = cv.bitwise_or(rectangle, circle)
cv.imshow('Bitwise OR', bitwise_or)
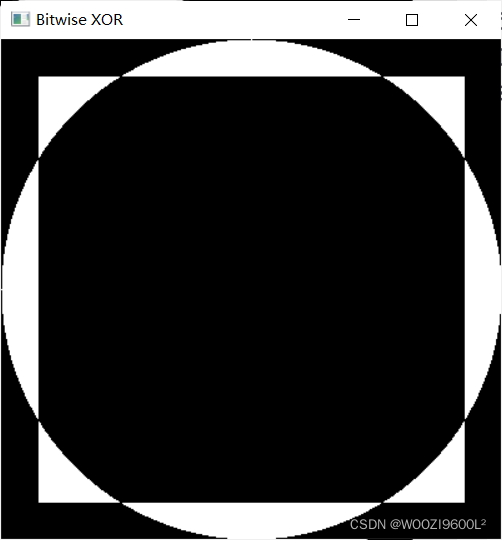
# bitwise XOR --> non-intersecting regions
bitwise_xor = cv.bitwise_xor(rectangle, circle)
cv.imshow('Bitwise XOR', bitwise_xor)
# bitwise NOT
bitwise_not = cv.bitwise_not(circle)
cv.imshow('Circle NOT', bitwise_not)
cv.waitKey(0)

2.blurring
#pylint:disable=no-member
import cv2 as cv
img = cv.imread('../Resources/Photos/cats.jpg')
cv.imshow('Cats', img)
# Averaging
average = cv.blur(img, (3,3))
cv.imshow('Average Blur', average)
# Gaussian Blur
gauss = cv.GaussianBlur(img, (3,3), 0)
cv.imshow('Gaussian Blur', gauss)
# Median Blur
median = cv.medianBlur(img, 3)
cv.imshow('Median Blur', median)
# Bilateral
bilateral = cv.bilateralFilter(img, 10, 35, 25)
cv.imshow('Bilateral', bilateral)
cv.waitKey(0)





3.colour_spaces
#pylint:disable=no-member
import cv2 as cv
import matplotlib.pyplot as plt
img = cv.imread('../Resources/Photos/park.jpg')
cv.imshow('Park', img)
# plt.imshow(img)
# plt.show()
# BGR to Grayscale
gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
cv.imshow('Gray', gray)
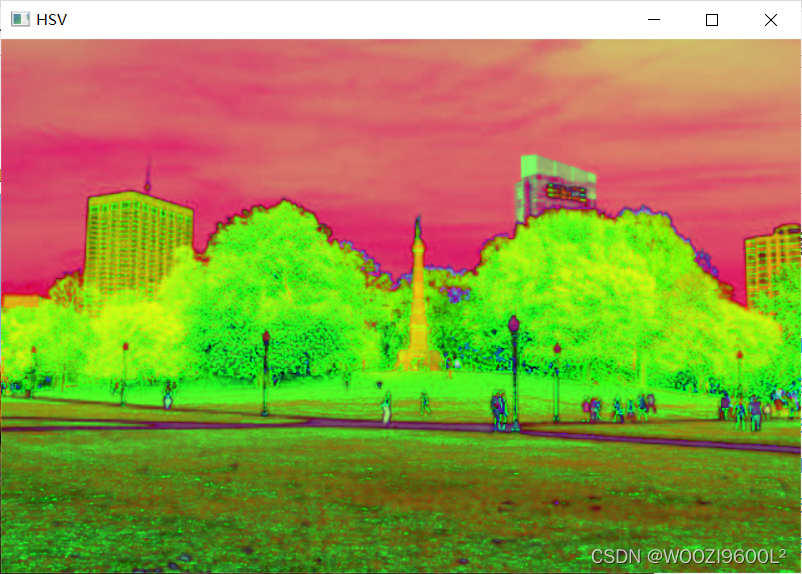
# BGR to HSV
hsv = cv.cvtColor(img, cv.COLOR_BGR2HSV)
cv.imshow('HSV', hsv)
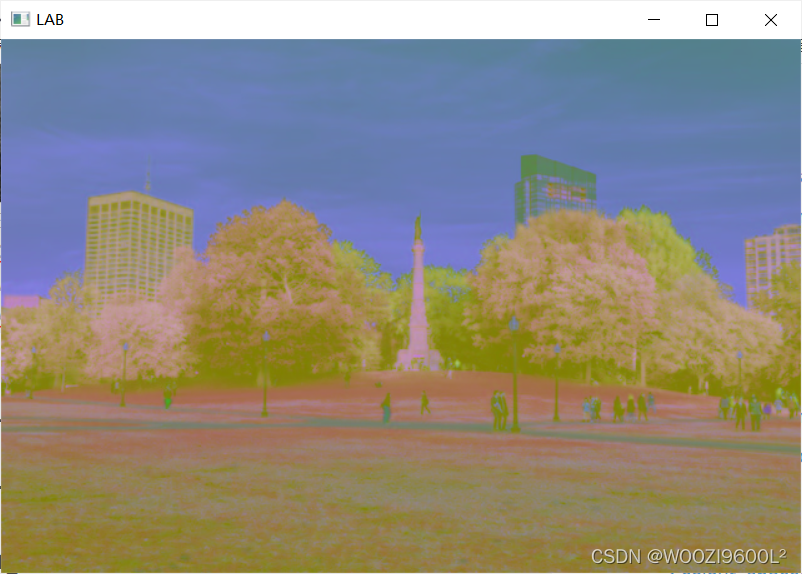
# BGR to L*a*b
lab = cv.cvtColor(img, cv.COLOR_BGR2LAB)
cv.imshow('LAB', lab)
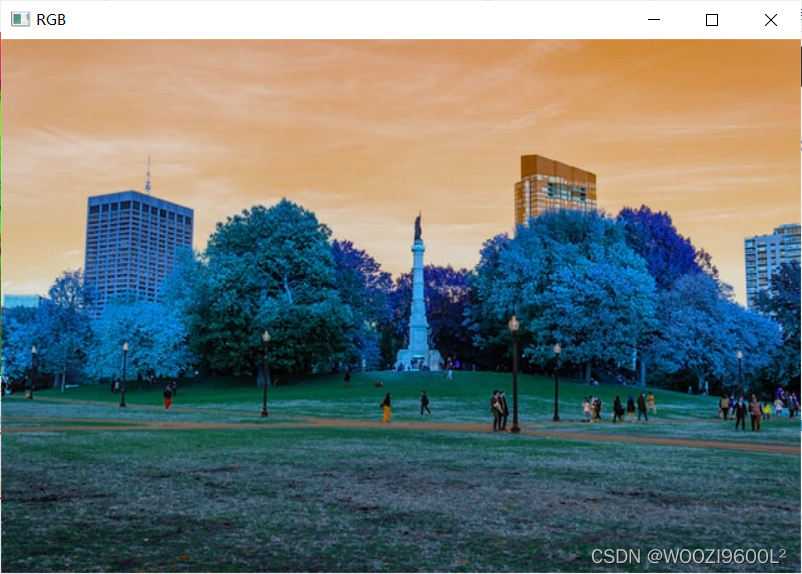
# BGR to RGB
rgb = cv.cvtColor(img, cv.COLOR_BGR2RGB)
cv.imshow('RGB', rgb)
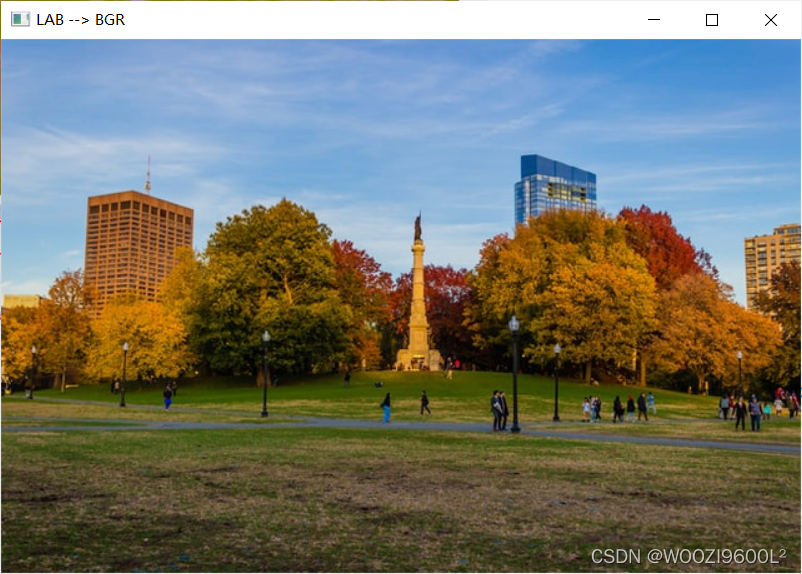
# HSV to BGR
lab_bgr = cv.cvtColor(lab, cv.COLOR_LAB2BGR)
cv.imshow('LAB --> BGR', lab_bgr)
cv.waitKey(0)

4.gradients
#pylint:disable=no-member
import cv2 as cv
import numpy as np
img = cv.imread('../Resources/Photos/park.jpg')
cv.imshow('Park', img)
gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
cv.imshow('Gray', gray)
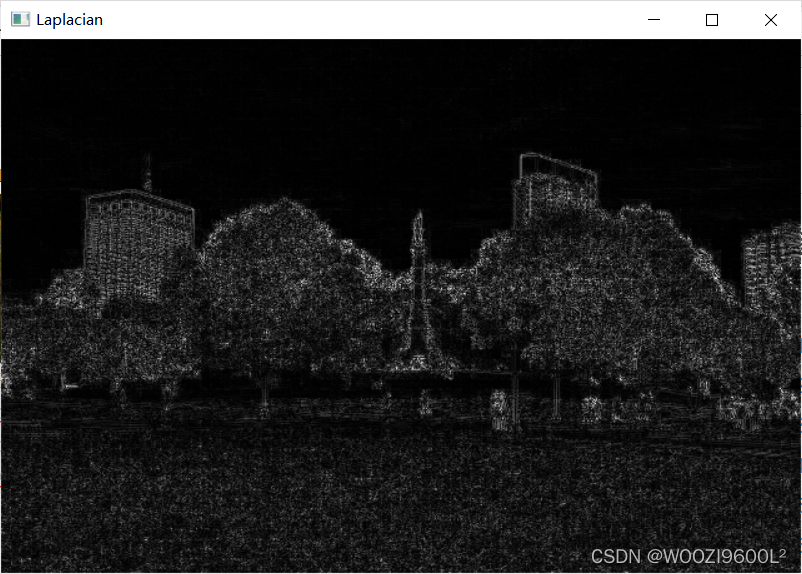
# Laplacian
lap = cv.Laplacian(gray, cv.CV_64F)
lap = np.uint8(np.absolute(lap))
cv.imshow('Laplacian', lap)
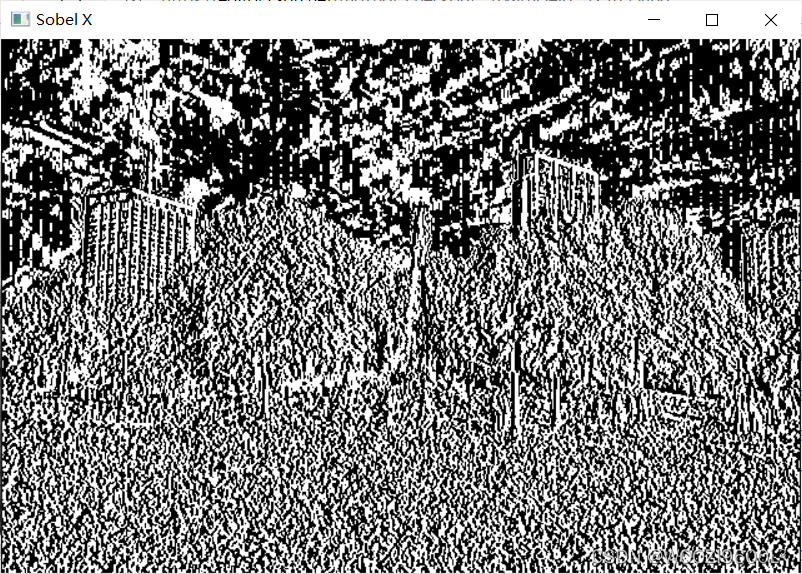
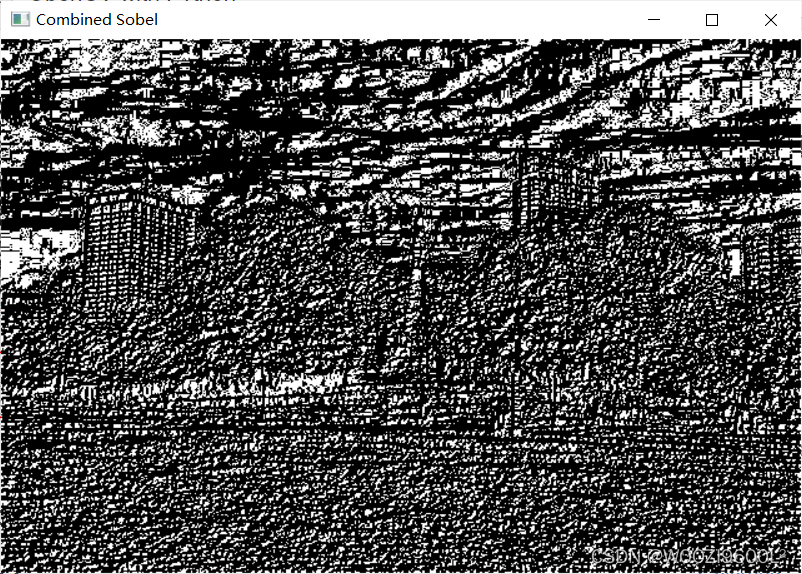
# Sobel
sobelx = cv.Sobel(gray, cv.CV_64F, 1, 0)
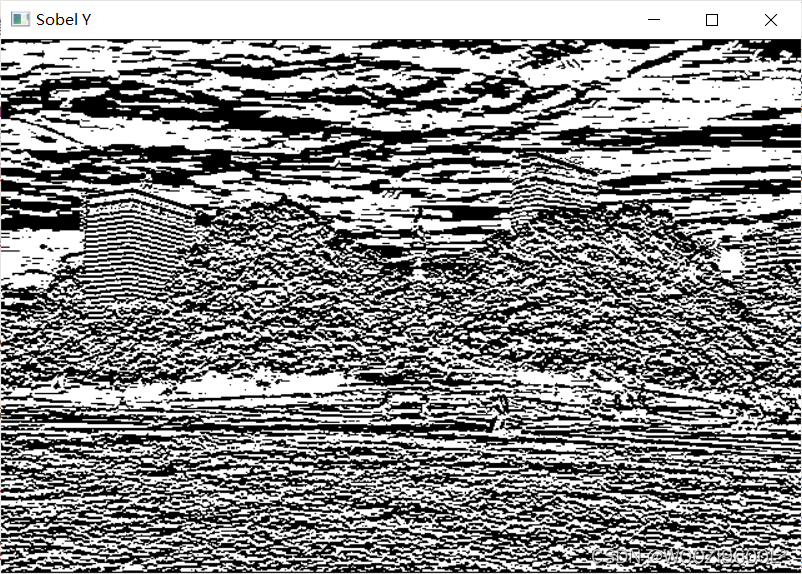
sobely = cv.Sobel(gray, cv.CV_64F, 0, 1)
combined_sobel = cv.bitwise_or(sobelx, sobely)
cv.imshow('Sobel X', sobelx)
cv.imshow('Sobel Y', sobely)
cv.imshow('Combined Sobel', combined_sobel)
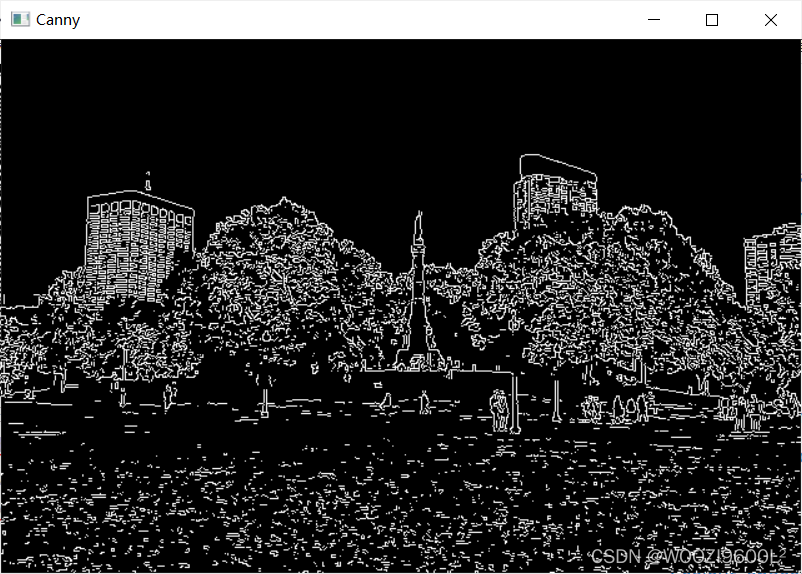
canny = cv.Canny(gray, 150, 175)
cv.imshow('Canny', canny)
cv.waitKey(0)

5.histogram
#pylint:disable=no-member
import cv2 as cv
import matplotlib.pyplot as plt
import numpy as np
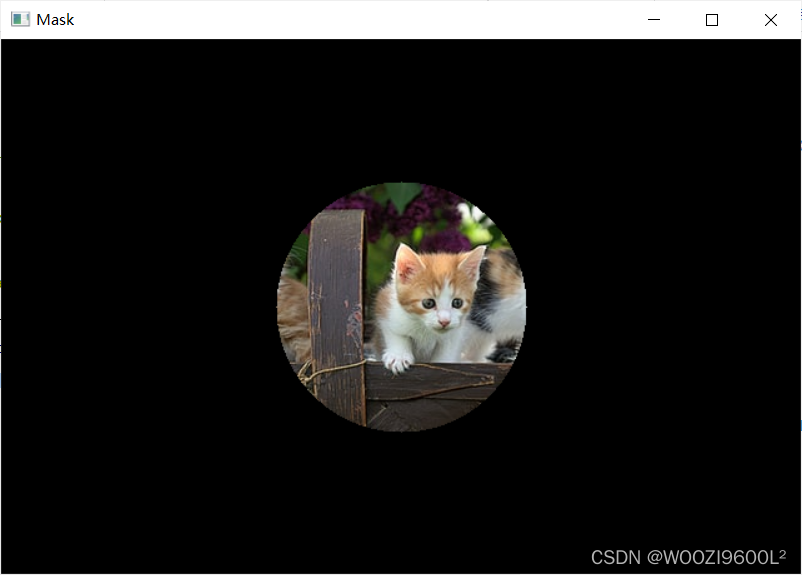
img = cv.imread('../Resources/Photos/cats.jpg')
cv.imshow('Cats', img)
blank = np.zeros(img.shape[:2], dtype='uint8')
# gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
# cv.imshow('Gray', gray)
mask = cv.circle(blank, (img.shape[1]//2,img.shape[0]//2), 100, 255, -1)
masked = cv.bitwise_and(img,img,mask=mask)
cv.imshow('Mask', masked)
# GRayscale histogram
# gray_hist = cv.calcHist([gray], [0], mask, [256], [0,256] )
# plt.figure()
# plt.title('Grayscale Histogram')
# plt.xlabel('Bins')
# plt.ylabel('# of pixels')
# plt.plot(gray_hist)
# plt.xlim([0,256])
# plt.show()
# Colour Histogram
plt.figure()
plt.title('Colour Histogram')
plt.xlabel('Bins')
plt.ylabel('# of pixels')
colors = ('b', 'g', 'r')
for i,col in enumerate(colors):
hist = cv.calcHist([img], [i], mask, [256], [0,256])
plt.plot(hist, color=col)
plt.xlim([0,256])
plt.show()
cv.waitKey(0)

6.masking
#pylint:disable=no-member
import cv2 as cv
import numpy as np
img = cv.imread('../Resources/Photos/cats 2.jpg')
cv.imshow('Cats', img)
blank = np.zeros(img.shape[:2], dtype='uint8')
cv.imshow('Blank Image', blank)
circle = cv.circle(blank.copy(), (img.shape[1]//2 + 45,img.shape[0]//2), 100, 255, -1)
rectangle = cv.rectangle(blank.copy(), (30,30), (370,370), 255, -1)
weird_shape = cv.bitwise_and(circle,rectangle)
cv.imshow('Weird Shape', weird_shape)
masked = cv.bitwise_and(img,img,mask=weird_shape)
cv.imshow('Weird Shaped Masked Image', masked)
cv.waitKey(0)


7.rescale_resize
#pylint:disable=no-member
import cv2 as cv
# img = cv.imread('../Resources/Photos/cat.jpg')
# cv.imshow('Cat', img)
def rescaleFrame(frame, scale=0.75):
# Images, Videos and Live Video
width = int(frame.shape[1] * scale)
height = int(frame.shape[0] * scale)
dimensions = (width,height)
return cv.resize(frame, dimensions, interpolation=cv.INTER_AREA)
def changeRes(width,height):
# Live video
capture.set(3,width)
capture.set(4,height)
# Reading Videos
capture = cv.VideoCapture('../Resources/Videos/dog.mp4')
while True:
isTrue, frame = capture.read()
frame_resized = rescaleFrame(frame, scale=.2)
cv.imshow('Video', frame)
cv.imshow('Video Resized', frame_resized)
if cv.waitKey(20) & 0xFF==ord('d'):
break
capture.release()
cv.destroyAllWindows()

8.splitmerge
#pylint:disable=no-member
import cv2 as cv
import numpy as np
img = cv.imread('../Resources/Photos/park.jpg')
cv.imshow('Park', img)
blank = np.zeros(img.shape[:2], dtype='uint8')
b,g,r = cv.split(img)
blue = cv.merge([b,blank,blank])
green = cv.merge([blank,g,blank])
red = cv.merge([blank,blank,r])
cv.imshow('Blue', blue)
cv.imshow('Green', green)
cv.imshow('Red', red)
print(img.shape)
print(b.shape)
print(g.shape)
print(r.shape)
merged = cv.merge([b,g,r])
cv.imshow('Merged Image', merged)
cv.waitKey(0)