һ. ����
�ڿ�ʼ���мලѧϰ��ʱ��������Ҫ�ռ�һ��ѵ����
D
t
r
=
{
(
x
i
,
y
i
)
}
i
=
1
n
D_{tr}=\{(x_i,y_i)\}^n_{i=1}
Dtr?={(xi?,yi?)}i=1n?�����ŵļලѧϰ���ٶ�ÿһ�����Ӷ��Ǵ�һ���̶��ĸ��ʷֲ�P�н��ж���ͬ�ֲ��IJ������ලѧϰ��Ŀ��Ϊ����һ��ģ��
f
f
fȥԤ��Ŀ������yͨ��x��Ϊ��ʵ�����ּ���,�ලѧϰͨ�����þ��������С��ԭ��(ERM),
f
f
f�����������Ϊ
1
�O
D
t
r
�O
��
(
x
i
,
y
i
)
��
D
t
r
l
(
f
(
x
i
)
,
y
i
)
\frac{1}{|D_{tr}|}\sum_{(x_i,y_i) \in D_{tr}}l(f(x_i),y_i)
�ODtr?�O1?��(xi?,yi?)��Dtr??l(f(xi?),yi?)��ʵ����,ERM��Ҫ��α���ѵ������
ERM�Ƕ�������Ϊ�������ѧϰ�ļ�Ȼ����ʵ�����ǵĹ۲��������,����ͬһ���������ܼ�ס���������ݡ����,iid�ļ�����κ�ʹ��ERMԭ���ϣ���������ˡ�Ҳ����˵ERM�ᵼ�������Ե�������
����ͨ����С��ERM������ѧϰ�IJ�ࡣֵ��ע�����,���߽��е�ѧϰ��һ����һ��,��˳��ĵ��
(
x
1
,
t
1
,
y
1
)
,
.
.
.
,
(
x
i
,
t
i
,
y
i
)
,
.
.
.
,
(
x
n
,
t
n
.
y
n
)
(1)
(x_1,t_1,y_1),...,(x_i,t_i,y_i),...,(x_n,t_n.y_n) \tag{1}
(x1?,t1?,y1?),...,(xi?,ti?,yi?),...,(xn?,tn?.yn?)(1)
�������������,������ERM����֪����ս:
- Non-iid����������:���ݵ������Զ����κι̶����ʷֲ� P ( X , T , Y ) P(X,T,Y) P(X,T,Y)���Dz�ȷ����,��Ϊһ�������л�,�Ϳ��Թ۲쵽�����������һϵ�����ӡ�
- ����������:ѧϰ��������ܻ���ѧϰ��֮ǰ�Ѿ�����������еı���
- Ǩ��ѧϰ:�����������������ʱ,����Ǩ��ѧϰ�Ļ��ᡣ�⽫ת��Ϊ�����ѧϰ������,����߾���������ܡ�
��. ����ѧϰ�Ŀ��
����(1)��������������,���Ǽ�������������ֲ����Ǿֲ���iid,Ҳ����ÿһ��
(
x
i
,
t
i
,
y
i
)
(x_i,t_i,y_i)
(xi?,ti?,yi?)������
(
x
i
,
y
i
)
~
i
i
d
P
t
i
(
X
,
Y
)
(x_i,y_i)~_{iid}P_{t_i}(X,Y)
(xi?,yi?)~iid?Pti??(X,Y)�����ǵ�Ŀ��Ϊѧϰ��һ��ģ��
f
f
f,�ܹ����κ�ʱ�̽���Ԥ��,�����IJ��Կ������������ڹ�ȥ�۲쵽������,��ǰ������������ǽ�����δ������������
����������: ��˳�����������,����������������Ҫ���ḻ��������Ϊ��ѧϰ�ṩ����,�������֮����Ե���ʹ���µ������������ƶϳ���������,��������������������ѧϰ��������塣�ڱ����и��ӹ�ע�ڼ�������������,��һ������������ѧϰ��Ϊδ�����о�������ѧϰ���ᡣ
ѵ��Э���Լ�����ָ��
������,���ǵ��������е��趨����:a.���������ܴ�,b.ÿ�������ѵ�����Ӻ���,c.ѧϰ��ֻ�۲�ÿ�����������һ��,d.�����˺���Ǩ�ƺ�������ָ�ꡣ
���,��ѵ��ʱ��,����ÿһ�ν���һ������(��һ��mini-batch)��ѧϰ�ߡ�ͬʱѧϰ�߲��ᾭ��ͬһ����������,���������ǰ���˳����С�����Ҫ������ǿ���κ�˳��,��Ϊδ��������������ȥ���غϡ�
���˼��ѧϰ�߿�����ı���,����ѧϰ��ת��֪ʶ������Ҳ����Ҫ,�������˵,��Ҫ����:
- ����Ǩ��(BWT)�����������ҪΪѧϰ����t֮��t��ǰ����ı��֡�һ����,ѧϰijЩ��������ǰһ�����������,���������Ǩ�ơ�����Щ��ᵼ�¸���Ǩ�ơ������ĸ�Ǩ�ƾͻᵼ��������������
- ��ǰ��Ǩ��(FWT)�������������ѧϰ����t֮��ģ����δ������ѧϰ�еı��֡�
�����������ԭ�������,���Ƕ�T��������ÿ������IJ��Լ��ķ��ʡ���һ��ģ�����������
t
i
t_i
ti?֮��,������Ҫ�������IJ��Ա�������������(T)������������֮��,���ǿ��Թ���һ������
R
��
R
T
?
T
R\in \mathbb{R}^{T*T}
R��RT?T,����
R
i
,
j
R_{i,j}
Ri,j?��ʾΪ���Ե�ȷ�ʶ�������
t
j
t_j
tj?�ڹ۲������һ����
t
i
t_i
ti?�����ӡ���
b
��
\bar{b}
b��Ϊÿ������������ʼ��ʱ�IJ��Ծ�������,���ǿ��Զ�������������:
A
C
C
=
1
T
��
i
=
1
T
R
T
,
i
(2)
ACC = \frac{1}{T}\sum_{i=1}^TR_{T,i} \tag{2}
ACC=T1?i=1��T?RT,i?(2)
B
W
T
=
1
T
?
1
��
i
=
1
T
?
1
R
T
,
i
?
R
i
,
i
(3)
BWT =\frac{1}{T-1}\sum_{i=1}^{T-1}R_{T,i}-R_{i,i} \tag{3}
BWT=T?11?i=1��T?1?RT,i??Ri,i?(3)
B
W
T
=
1
T
?
1
��
i
=
2
T
?
1
R
i
?
1
,
i
?
b
��
i
(4)
BWT =\frac{1}{T-1}\sum_{i=2}^{T-1}R_{i-1,i}-\bar{b}_i \tag{4}
BWT=T?11?i=2��T?1?Ri?1,i??b��i?(4)
��. �龰�����ݶ�(GEM)
GEM����Ҫ����Ϊһ���龰����
M
t
\mathcal{M}_t
Mt?,�洢�˴�����t�й۲쵽��ʾ�����Ӽ���������,��Ҫרע��ͨ���龰�������Чʹ������С�������Ǩ��(����������)��
ʵ�ʻ���,ѧϰ�߹���M���ڴ�λ�á����������T����֪��,���ǿ��Եó�ÿ��������m = M/T���ڴ�ռ䡣�෴,�����������δ֪,��������Ҫ���ϼ���m��ֵ���µ�����Ϊ�˼����,���Ǽ����ڴ�����ÿ����������һ��ʾ������,�����������,���Զ���ӵ�k��������龰�ڴ���ʧΪ:
l
(
f
��
,
M
k
)
=
1
�O
M
k
�O
��
(
x
i
,
k
,
y
i
)
��
M
k
l
(
f
��
(
x
i
,
k
)
,
y
i
)
(5)
l(f_\theta,\mathcal{M}_k)=\frac{1}{|\mathcal{M}_k|}\sum_{(x_i,k,y_i)\in \mathcal{M}_k}l(f_\theta(x_i,k),y_i) \tag{5}
l(f��?,Mk?)=�OMk?�O1?(xi?,k,yi?)��Mk?��?l(f��?(xi?,k),yi?)(5)
��Ȼ,��С����ǰ����ʧ�ټ���(5)�ᵼ����
M
\mathcal{M}
M�д��ڹ���ϡ����߽�ʹ����ʧ(5)��Ϊ����ʽ��Լ��,���������ӵ��������١�Ҳ���������������:
min
?
��
???
l
(
f
��
(
x
,
t
)
,
y
)
��
��
??
l
(
f
��
,
M
k
)
<
=
l
(
f
��
t
?
1
,
M
k
)
?
f
o
r
?
a
l
l
?
k
<
t
,
(6)
\begin{aligned} \min_{\theta} \ \ \ &l(f_\theta(x,t),y) \\ ����\ \ &l(f_\theta,\mathcal{M}_k)<=l(f_\theta^{t-1},\mathcal{M}_k) \ for\ all\ k<t,\tag{6} \end{aligned}
��min????����???l(f��?(x,t),y)l(f��?,Mk?)<=l(f��t?1?,Mk?)?for?all?k<t,?(6)
������,����������������Ҫ������ȥ��������(6)����һ��,û�б�Ҫȥ�洢�ɵ�ģ��
f
��
t
?
1
f_\theta^{t-1}
f��t?1?,ֻҪ��ô��֤ÿ�θ��º�,֮ǰ��������ʧ�������ӡ��ڶ�,���躯���Ǿֲ����Ե�,�����Ǵ������ӹ�ȥ������,���ǿ������֮ǰ��ʧ���ӵ�����,����������ʧ����֮��ļнǡ����(6)���Ա���Ϊ:
<
g
,
g
k
>
:
=
<
?
l
(
f
��
(
x
,
t
)
,
y
)
?
��
,
?
l
(
f
��
,
M
k
)
?
��
>
?
>
=
0
,
f
o
r
?
a
l
l
?
k
<
t
(7)
<g,g_k>:=<\frac{\partial l(f_\theta(x,t),y)}{\partial\theta},\frac{\partial l(f_\theta,\mathcal{M}_k)}{\partial\theta}>\ >=0,for\ all\ k<t \tag{7}
<g,gk?>:=<?��?l(f��?(x,t),y)?,?��?l(f��?,Mk?)?>?>=0,for?all?k<t(7)
������еĶ�����(7),��ô��������g����������֮ǰ�������ʧ������,���Υ����һ�������Ļ�,��ô������һ����ǰ�������ڲ������º���ʧ�����ӡ���ô���Խ�Υ�����ݶ�gͶ�䵽��ӽ����ݶ�
g
~
\tilde{g}
g~?(��ƽ����l2�淶)�����,������,��ע���Ϊ:
min
?
g
~
1
2
??
�O
�O
g
?
g
~
�O
�O
2
2
��
��
<
g
~
,
g
k
>
??
>
=
0
?
f
o
r
?
a
l
l
?
k
<
t
(8)
\min_{\tilde{g}} \frac{1}{2}\ \ ||g-\tilde{g}||^2_2 \\����<\tilde{g},g_k>\ \ >=0\ for\ all\ k<t \tag{8}
g~?min?21???�O�Og?g~?�O�O22?����<g~?,gk?>??>=0?for?all?k<t(8)
����һ�����Է�������ֻ��Ҫ�任���ǵ�
g
~
\tilde{g}
g~?ʹ������ÿһ��֮ǰ����������нdz���Ǽ���,����α仯�����,���߽���������ת����2�ι滮������,Ȼ��ת�������������,�������ת��Ϊ2�ι滮�Ķ�ż������⡣
min
?
z
?
1
2
v
T
G
G
T
?
g
T
z
+
g
T
G
T
v
s
u
b
j
e
c
t
?
t
o
??
v
>
=
0
(9)
\min_z\ \frac{1}{2}v^TGG^T-g^Tz+g^TG^Tv \\ subject\ to \ \ v >=0 \tag{9}
zmin??21?vTGGT?gTz+gTGTvsubject?to??v>=0(9)
�����v֮��,���ǿ��Ի�������µ�
g
~
=
G
T
v
+
g
\tilde{g} = G^Tv+g
g~?=GTv+g
�����㷨��������:
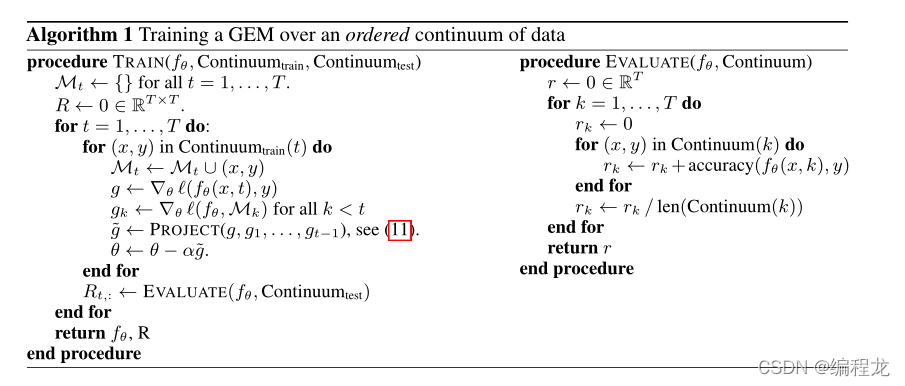
(ͼ���11��Ӧ���ǵĹ�ʽ9)
��. �������
���ߵĴ����ַ������
��ҿ����϶��Զ��ι滮����Ƚ��ɻ�,��ʵ�������ר���о��㷨��,���Բ�����ô����,��Ϊ����ֻ��Ҫ���ÿ⼴�ɡ�
�ٿ�ʼ����ǰ,����������һ��������ĺ���ͨ��DNN��ʲô���𡣵�һ��,������Ҫ�洢֮ǰ������(Ҳ���ǿ���һ���ռ�洢��ǰѵ�����IJ�������)���ڶ���,�ڽ��������ʧʱ,��Ҫ�Դ洢�����������ν�����ʧ����,����������Ӧ���ݶȡ���������,���ݶ��ι滮����任���ǵ�ǰ������ݶȡ�
����֮��,���Ǿ��ݲ�ͬ��һ�ν��д�������
�����ǿ��ٿռ�洢����,Ҳ������һ���б�(������)��һ����x��y
(�ؼ������Ӧ�ĵ�ַΪ model/gem/observe)
## ��ǰѵ����һ��batch������(����Ϊ10��)
bsz = y.data.size(0)
## �����ǰ����洢�Ƿ����ڴ�����(����Ϊÿ����������256��)
endcnt = min(self.mem_cnt + bsz, self.n_memories)
## �����ǰ�ܴ���ٸ�(����Ϊ<=10)
effbsz = endcnt - self.mem_cnt
## ������
self.memory_data[t, self.mem_cnt: endcnt].copy_(
x.data[: effbsz])
if bsz == 1:
self.memory_labs[t, self.mem_cnt] = y.data[0]
else:
self.memory_labs[t, self.mem_cnt: endcnt].copy_(
y.data[: effbsz])
## �����ڴ�ָ�뷽����һ��(ָ����һ�δ洢�Ŀ�ͷ)
self.mem_cnt += effbsz
if self.mem_cnt == self.n_memories:
self.mem_cnt = 0
��һ������֮��,���������ڶ��㲻ͬ,Ҳ�������֮ǰ�������ʧ���ݶȡ�
if len(self.observed_tasks) > 1:
for tt in range(len(self.observed_tasks) - 1):
self.zero_grad()
# fwd/bwd on the examples in the memory
past_task = self.observed_tasks[tt]
## ��������������y����Сֵ�����ֵ
offset1, offset2 = compute_offsets(past_task, self.nc_per_task,
self.is_cifar)
ptloss = self.ce(
self.forward(
self.memory_data[past_task],
past_task)[:, offset1: offset2],
self.memory_labs[past_task] - offset1)
ptloss.backward()
## �洢
store_grad(self.parameters, self.grads, self.grad_dims,
past_task)
���Ҳ���Ǽ��㵱ǰ�����ݶ��Լ��ҵ��Ƿ��д����ݶȼнǴ���90�ȵ����:
self.zero_grad()
## �����ݶ�
offset1, offset2 = compute_offsets(t, self.nc_per_task, self.is_cifar)
loss = self.ce(self.forward(x, t)[:, offset1: offset2], y - offset1)
loss.backward()
# check if gradient violates constraints
if len(self.observed_tasks) > 1:
# copy gradient
store_grad(self.parameters, self.grads, self.grad_dims, t)
indx = torch.cuda.LongTensor(self.observed_tasks[:-1]) if self.gpu \
else torch.LongTensor(self.observed_tasks[:-1])
## �����ݶȼн�
dotp = torch.mm(self.grads[:, t].unsqueeze(0),
self.grads.index_select(1, indx))
## ���ڼнǴ���90����ж��ι滮����
if (dotp < 0).sum() != 0:
project2cone2(self.grads[:, t].unsqueeze(1),
self.grads.index_select(1, indx), self.margin)
# copy gradients back
overwrite_grad(self.parameters, self.grads[:, t],
self.grad_dims)
self.opt.step()
���Ŷ�������������ι滮����δ���
�����Ҷ����������(9)����,��Ϊ���v�Ĺ����о���Ŀ�,����ֻ��Ҫ�����Ӧ�������ɡ�
��ǰ�����ݶ�:g
֮ǰ����������ݶ�:G
(ע��֮ǰ����������ݶ�
G
=
?
(
g
1
,
.
.
.
.
,
g
t
?
1
)
)
G=-(g_1,....,g_{t-1}))
G=?(g1?,....,gt?1?))
def project2cone2(gradient, memories, margin=0.5, eps=1e-3):
"""
Solves the GEM dual QP described in the paper given a proposed
gradient "gradient", and a memory of task gradients "memories".
Overwrites "gradient" with the final projected update.
input: gradient, p-vector
input: memories, (t * p)-vector
output: x, p-vector
"""
memories_np = memories.cpu().t().double().numpy()
gradient_np = gradient.cpu().contiguous().view(-1).double().numpy()
t = memories_np.shape[0]
## P = 1/2 *G *G^T
P = np.dot(memories_np, memories_np.transpose())
P = 0.5 * (P + P.transpose()) + np.eye(t) * eps
## q = g^T * G^T
q = np.dot(memories_np, gradient_np) * -1
G = np.eye(t)
h = np.zeros(t) + margin
v = quadprog.solve_qp(P, q, G, h)[0]
x = np.dot(v, memories_np) + gradient_np
gradient.copy_(torch.Tensor(x).view(-1, 1))
������ƪ����,��ҿ��Կ�һ������һ������Ľ�GEM�㷨��