文章目录
1、镜头的基本概念
镜头主要参数
-
放大倍率
- 视野(Field of View,FOV)
- 光学放大倍率( β \beta β)
-
距离
- 工作距离(Working Distance,WD)
- 焦距(Focal Length,f)
- 景深(Deepth of Field,DOF)
-
性能
- 分辨率
- 光学畸变
- 调制度传递函数(Modulation Transfer Function,MTF)
-
亮度
-
光圈大小(F数)
-
最大兼容CCD芯片大小(CCD尺寸)
-
(1)放大倍率
视野(FOV)
? 图像采集设备所能够覆盖的范围。
光学放大倍率( β \beta β)
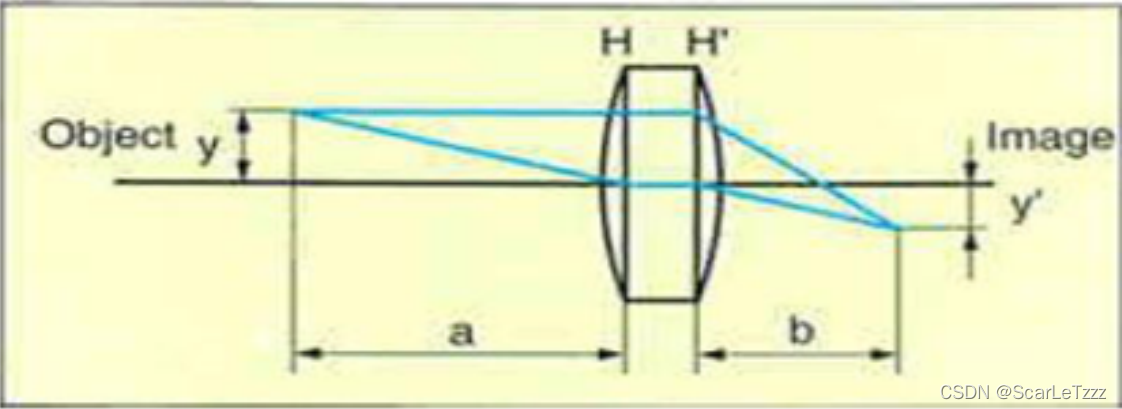
如图一模型所示:光学放大倍数=相机靶面大小/视场大小( β = y ′ y \beta=\frac{y^{'}}{y} β=yy′?)
(2)距离
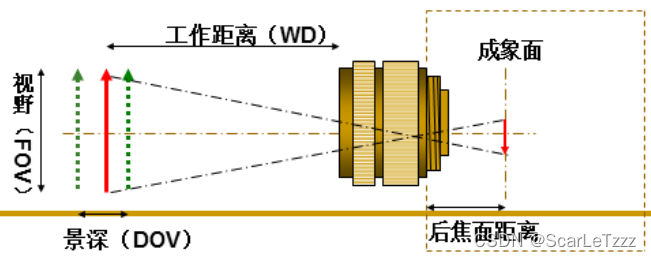
工作距离(Working Distance,WD)
-
定义:镜头前透镜表面到检测物体表面的距离。
-
最大/最小工作距离:从物镜到被检测的距离范围,小于最小工作距离或者大于最大工作距离时,系统均不能正常成像。
景深(Deepth of Field,DOF)
-
直观定义:在某个焦距位置上,景深的物体都可以清晰成像,如图二。
-
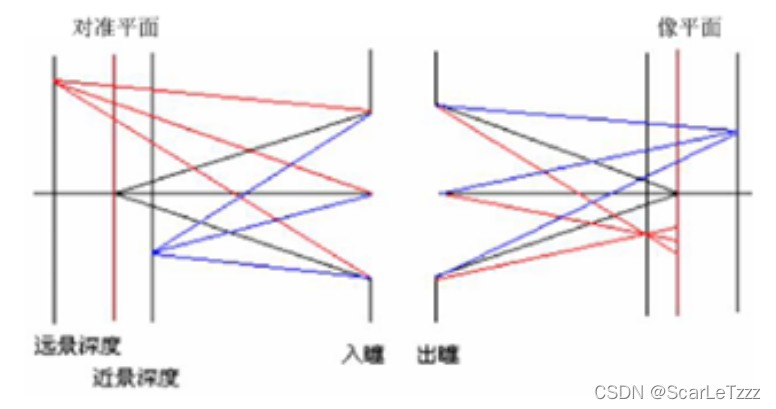
严格定义:对理想的光学系统,像平面对应一个理想物平面。实际光学系统,能够清晰成像的最远物面到理想物面的距离成为远景深度;能够清晰成像的最近物面到理想物面的距离成为近景深度,远景深度和近景深度的和就是光学系统的景深,如图三。
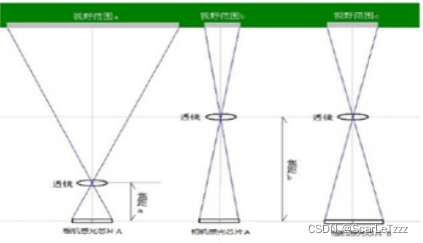
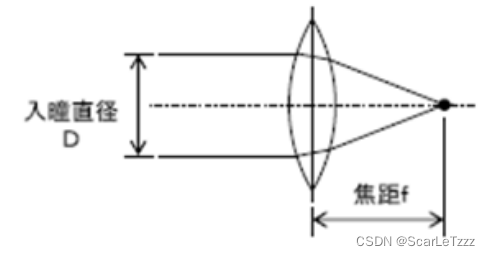
焦距(Focal Length,f)
- 定义:镜头的中心点到胶片平面上所形成的清晰影像之间的距离。
- 作用:如图四所示
- 焦距决定了该镜头拍摄的物体在胶片上所形成影像的大小,影像的大小与焦距成正比。
- 焦距决定了胶片给定的画面区域所适合的场景大小,适合的场景大小与焦距成反比。
(3)性能
分辨率
- 像方分辨率:测量系统能够重现的最小的细节的尺寸,常用毫米线对来表示(该镜头能分辨一毫米内多少对直线),不同的厂商对分辨率的定义可能不同。如图五,a图不能分辨两个球;b、c都能分辨。

-
物方分辨率:镜头能分辨开的两个物体之间的最小工作距离,单位( μ m \mu m μm)
像方分辨率 = 物方分辨率*镜头放大倍率
-
解像力(Resolving):1mm内的黑白线对数,单位( I p / m m Ip/mm Ip/mm)。
解像力=1/图像分辨率
-
成像面:可以在镜头的像面上清晰成像的物方平面。
-
根据测试的精度要求和视野选择相机的分辨率
像方分辨率=(视野的高/精度)*(视野的宽/精度)*2-->像方分辨率=像元尺寸*2满足上面公式的镜头分辨率与相机完全匹配。例如,相机像元尺寸5 μ m \mu m μm,镜头放大倍率0.5,当物方分辨率20 μ m \mu m μm时刚好匹配,物方分辨率<20 μ m \mu m μm,说明镜头过好,相机分辨率成为系统限制
精度:如果是尺寸测量,这个精度就是测量精度;如果是缺陷检测精度就是需要检测出的最小缺陷的尺寸
光学畸变
? 这里请看一篇文章:相机模型、参数
调制度传递函数(Modulation Transfer Function,MTF)
-
定义:MTF是空间频率和对比度定义的,他表征了光学系统传递对比度的能力,空间频率高时,对比度会下降。
-
空间频率:1mm内的黑白线对数,单位( I p / m m Ip/mm Ip/mm)
-
对比度:归一化的值。理想黑白线的对比度为1,对比度下降,观察到的图像会变模糊。
###(4)亮度
光圈大小(F数)
- 光圈:用来控制镜头通光量的装置,通常在镜头内。
- F数:表达光圈大小所用的数值,如
f
1.4
、
f
2
、
f
2.8
f1.4、f2、f2.8
f1.4、f2、f2.8等,如图六所示。
- F = f D F=\frac{f}{D} F=Df?
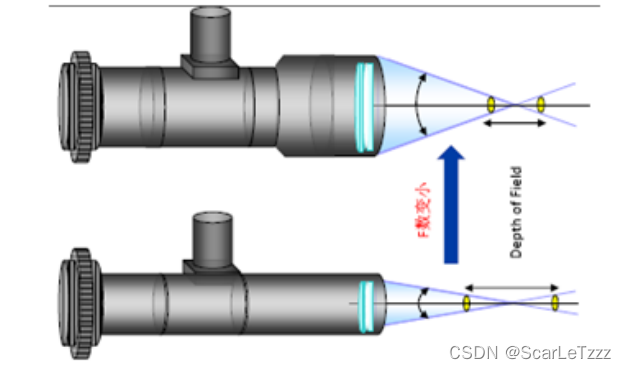
- F数越小,通光口径越大,景深越小
- F数越大,通光口径越小,景深越大
- 如图七所示:景深与光圈大小呈负相关
最大兼容CCD芯片大小
? 如图八所示,镜头成像尺寸要大于等于CCD芯片大小,否则会在成像时造成四角是黑的
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-IKGFc5JN-1641217555256)(D:\研一文件\笔记\Markdown\相机镜头选型\image-20220103170940775.png)]
2、镜头的选型
(1)选型依据
? 相机接口、物距、拍摄范围、CCD尺寸、畸变允许范围、放大率、焦距、变焦范围、光圈等。
(2)选型原则
-
镜头可支持的最大的CCD尺寸不能小于所搭配相机中CCD传感器芯片的尺寸。
-
镜头接口要跟相机接口匹配安装,也可以通过转换匹配安装。
-
镜头焦距的选择:焦距的选择涉及工作距离、CCD尺寸、视野大小。
- 焦距计算: f = W D ? h o r v H o r V = W D ? β f=\frac{WD*h \quad or \quad v}{H \quad or \quad V}=WD*\beta f=HorVWD?horv?=WD?β
- 其中 β \beta β为放大倍率
-
镜头的光谱特性要符合光源要求。镜头需要满足光源要求,才能获取全部的图像信息,需要考虑光源的波长、光谱范围、以及光源的种类是红外还是紫外等等。
-
镜头的畸变率要符合测量标准。
-
彩色/黑白:如果需要获取颜色信息选用彩色相机;定位、测量、识别以及缺陷检测应当使用黑白相机,因为黑白相机图像的信噪比高、灵敏度高、对比度大、数据量小,更利于图像处理。
-
一般静态场景选择面阵相机,对于快速运动物体可以选用线阵相机。