��ƪ�������ݴ�����Թ��¾ӵ�
ROS&OpenCV�µ�Ŀ��˫Ŀ����ͷ�ı궨��ʹ��
����ƪ���´���©��̫��,����Ӱ������ʵ��,�ʰ��Լ���ͨ�Ĺ��̼�����д������:
˫Ŀ����ͷ
���ȵ�ȷ�����˫Ŀ����ͷ���ڶ����Ļ��Ǻϳɵ�
����ͼ���˫Ŀ����ͷ:ʹ�õ�˫Ŀ����ͷ�ڼ�������ǰ������������豸���ֵġ����ֱȽϼ�,�ֱ���Ϊһ��ros_node�������ɡ�
�ϳ�ͼ���˫Ŀ����ͷ:ʹ�õ�˫Ŀ����ͷ�ڼ��������һ���豸,������������ͷ��ͼ��ϳ�Ϊ��һ��ͼ��,��ʱ��Ҫ�Ƚ�һ��ͼ�ָ�Ϊ��������,�ٷֱ���Ϊһ��ros_node������
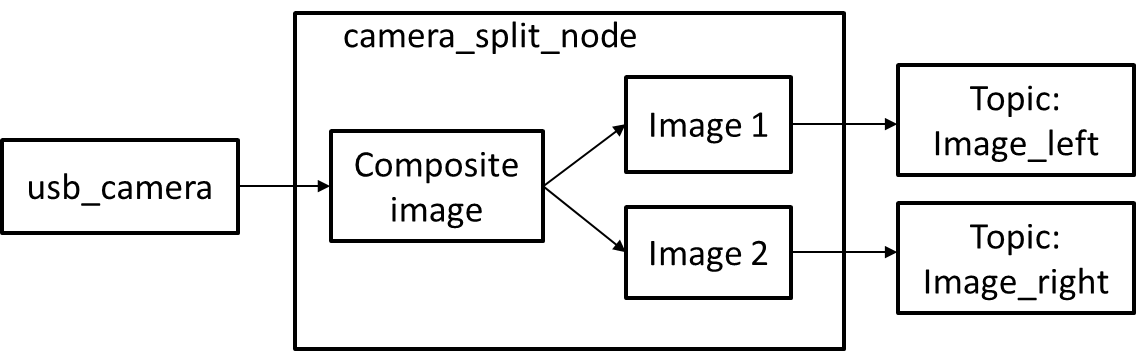
�ҵ��Ǻϳ�ͼ�ε�˫Ŀ����ͷ(�г��Ϻ�����Ҳ��������),��������ֻ�кϳ�ͼ��˫Ŀ�Ľ��������
��װusb_cam��
sudo apt install ros-melodic-usb-cam*
�ð�������ͷ��ͼ��ͨ��sensor_msgs::Image��Ϣ������
��װ��usb_cam����,��/opt/ros/melodic/share/usb_cam/launch�л����һ��usb_cam-test.launch�ļ�,�ڸ��ļ�����������ROS�ڵ�,usb_cam_node��image_view�����ļ���Ϳ���Ϊusb_cam_node���ò�����
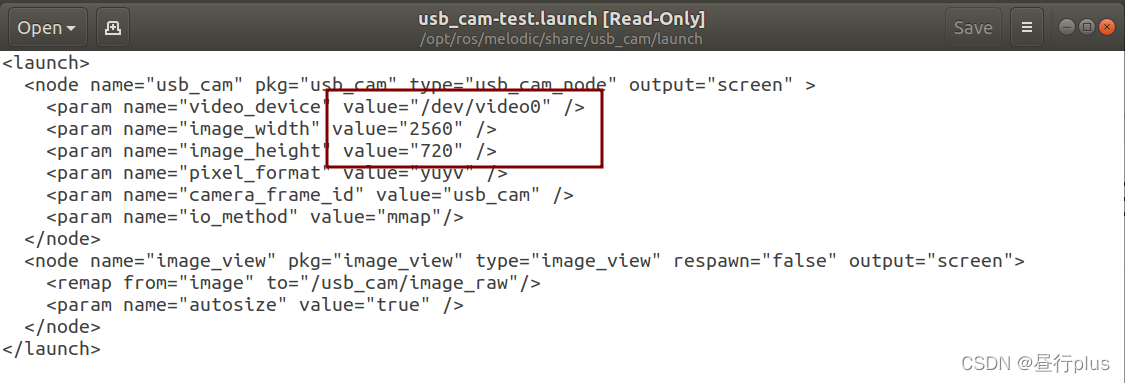
������Ҫ�ĵľ��Ƿ����е�����������
ʹ�����������鿴�������ͷ�豸��(��usb������ǰ���ĸ��豸�ű仯��):
ls /dev/video*

���Կ�����������video�ļ�,����ֻ�и�video_device���ó�**/dev/video0�ſ�������ʹ�á����ϳ�ͼ���˫Ŀ�����ϱ���Ӧ�ó��ֵ�/dev/video1�ᱨ��(�ҵĵ���û���Դ�����ͷ),��֪��/dev/video1**���ڵ�������ʲô?����д���·���Ļ�������һ��!!!
Ȼ��������������,Ҳ����ͼ��ֱ��ʡ�һ������ͷͼ��ķֱ�����1280*720,������Ϊ�Զ�����������ͷͼ��ϵ�һ��ȥ��,�������յõ�����2560*720�ķֱ��ʡ�
(��Ȼ��Ҳ�������ó�1280*720,ֻ���������ֻ��ʾһ��ͼ����û�취�ָ�����˰븱�����ˡ��ֶ���ͷ��)
��˫Ŀ
roscore
rosrun usb_cam usb_cam_node
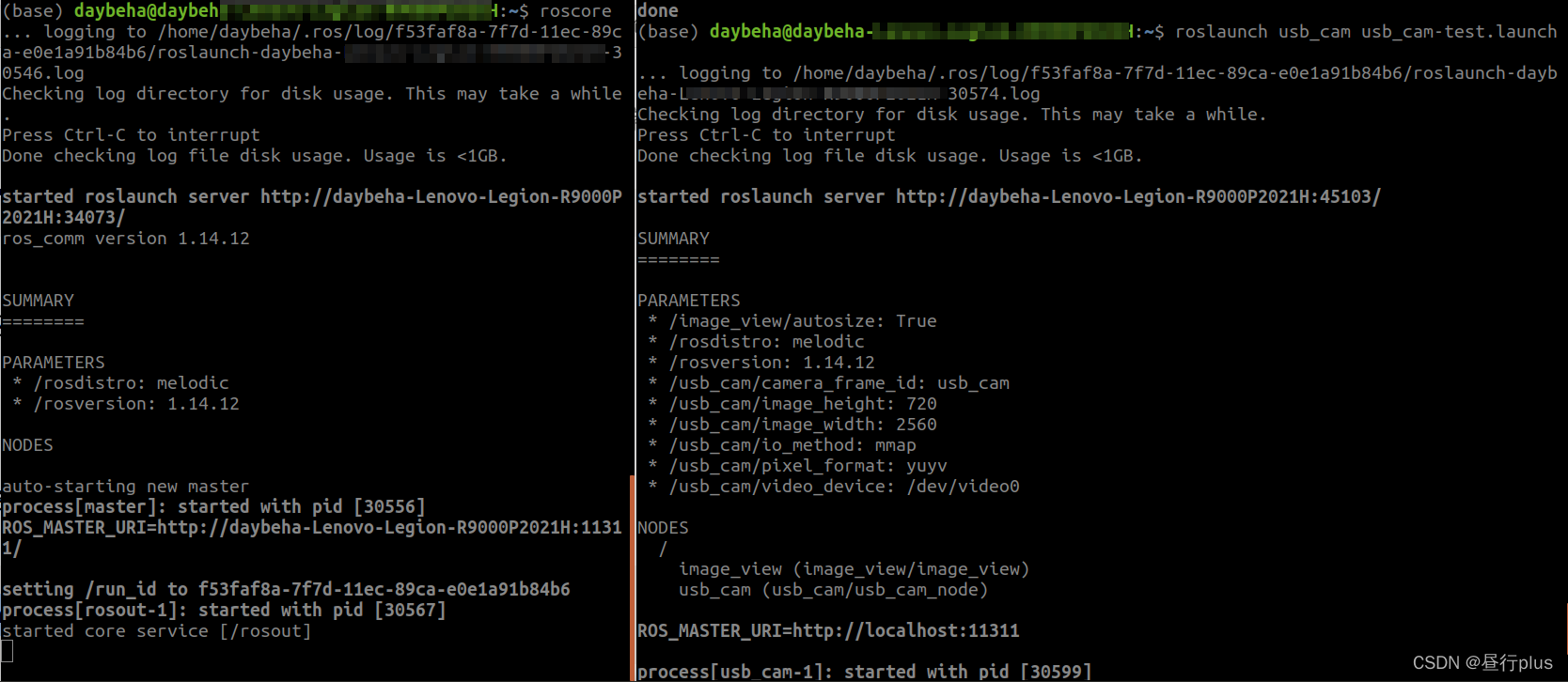
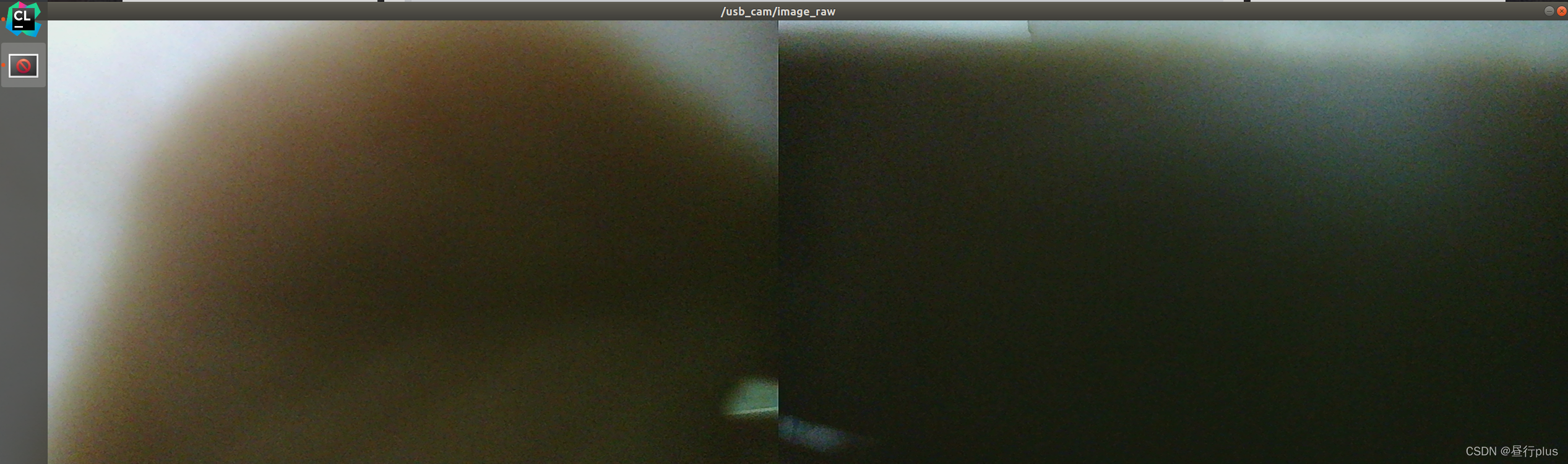
���Կ�һ��rostopic:

ROS���� �C �ָ�˫Ŀͼ��
1.���������ռ䲢��ʼ��
mkdir -p catkin_ws/src
cd catkin_ws
catkin_make
2.���� src ���� ros ������������
cd src
catkin_create_pkg camera_split cv_bridge image_transport roscpp sensor_msgs std_msgs camera_info_manager
3.��camera_split����CMakeLists.txt�ļ�#��include_directories:
find_package(OpenCV REQUIRED)
#��include_directories:
include_directories (
${catkin_INCLUDE_DIRS}
${OpenCV_INCLUDE_DIRS}
)
#���ӿ�ִ���ļ�
add_executable(camera_split_node src/camera_splid.cpp )
#ָ�����ӿ�
target_link_libraries(camera_splid_node
${catkin_LIBRARIES}
${OpenCV_LIBRARIES}
)
4.����Դ�����ļ�
//
// Created by daybeha on 2022/1/27.
//
#include <ros/ros.h>
#include <iostream>
#include <image_transport/image_transport.h>
#include <cv_bridge/cv_bridge.h>
#include <sensor_msgs/image_encodings.h>
#include <camera_info_manager/camera_info_manager.h>
#include <opencv2/opencv.hpp>
//#include <opencv2/imgproc/imgproc.hpp>
//#include <opencv2/highgui/highgui.hpp>
using namespace std;
class CameraSplitter
{
public:
CameraSplitter():nh_("~"),it_(nh_)
{
image_sub_ = it_.subscribe("/usb_cam/image_raw", 1, &CameraSplitter::imageCallback, this);
image_pub_left_ = it_.advertiseCamera("/left_cam/image_raw", 1);
image_pub_right_ = it_.advertiseCamera("/right_cam/image_raw", 1);
cinfo_ =boost::shared_ptr<camera_info_manager::CameraInfoManager>(new camera_info_manager::CameraInfoManager(nh_));
//��ȡ��������������,�õ�������������ļ���λ��
string left_cal_file = nh_.param<std::string>("left_cam_file", "");
string right_cal_file = nh_.param<std::string>("right_cam_file", "");
if(!left_cal_file.empty())
{
if(cinfo_->validateURL(left_cal_file)) {
cout<<"Load left camera info file: "<<left_cal_file<<endl;
cinfo_->loadCameraInfo(left_cal_file);
ci_left_ = sensor_msgs::CameraInfoPtr(new sensor_msgs::CameraInfo(cinfo_->getCameraInfo()));
}
else {
cout<<"Can't load left camera info file: "<<left_cal_file<<endl;
ros::shutdown();
}
}
else {
cout<<"Did not specify left camera info file." <<endl;
ci_left_=sensor_msgs::CameraInfoPtr(new sensor_msgs::CameraInfo());
}
if(!right_cal_file.empty())
{
if(cinfo_->validateURL(right_cal_file)) {
cout<<"Load right camera info file: "<<right_cal_file<<endl;
cinfo_->loadCameraInfo(right_cal_file);
ci_right_ = sensor_msgs::CameraInfoPtr(new sensor_msgs::CameraInfo(cinfo_->getCameraInfo()));
}
else {
cout<<"Can't load right camera info file: "<<left_cal_file<<endl;
ros::shutdown();
}
}
else {
cout<<"Did not specify right camera info file." <<endl;
ci_right_=sensor_msgs::CameraInfoPtr(new sensor_msgs::CameraInfo());
}
}
void imageCallback(const sensor_msgs::ImageConstPtr& msg)
{
cv_bridge::CvImageConstPtr cv_ptr;
namespace enc= sensor_msgs::image_encodings;
cv_ptr= cv_bridge::toCvShare(msg, enc::BGR8);
//��ȡROI(Region Of Interest),������ͼ��,�Ὣԭͼ�����ݿ���������
leftImgROI_=cv_ptr->image(cv::Rect(0,0,cv_ptr->image.cols/2, cv_ptr->image.rows));
rightImgROI_=cv_ptr->image(cv::Rect(cv_ptr->image.cols/2,0, cv_ptr->image.cols/2, cv_ptr->image.rows ));
//��������CvImage, ���ڴ��ԭʼͼ������Ҳ��֡�CvImage����ʱ�Ƕ�Mat�������õ�,����������ݿ���
leftImgPtr_=cv_bridge::CvImagePtr(new cv_bridge::CvImage(cv_ptr->header, cv_ptr->encoding,leftImgROI_) );
rightImgPtr_=cv_bridge::CvImagePtr(new cv_bridge::CvImage(cv_ptr->header, cv_ptr->encoding,rightImgROI_) );
//������/left_cam/image_raw��/right_cam/image_raw
ci_left_->header = cv_ptr->header; //����Ҫ,��Ȼ����ʾ��ͬ��������ȥ����
ci_right_->header = cv_ptr->header;
sensor_msgs::ImagePtr leftPtr =leftImgPtr_->toImageMsg();
sensor_msgs::ImagePtr rightPtr =rightImgPtr_->toImageMsg();
leftPtr->header=msg->header; //����Ҫ,��Ȼ�����ͼ��û��ʱ���
rightPtr->header=msg->header;
image_pub_left_.publish(leftPtr,ci_left_);
image_pub_right_.publish(rightPtr,ci_right_);
}
private:
ros::NodeHandle nh_;
image_transport::ImageTransport it_;
image_transport::Subscriber image_sub_;
image_transport::CameraPublisher image_pub_left_;
image_transport::CameraPublisher image_pub_right_;
boost::shared_ptr<camera_info_manager::CameraInfoManager> cinfo_;
sensor_msgs::CameraInfoPtr ci_left_;
sensor_msgs::CameraInfoPtr ci_right_;
cv::Mat leftImgROI_;
cv::Mat rightImgROI_;
cv_bridge::CvImagePtr leftImgPtr_=NULL;
cv_bridge::CvImagePtr rightImgPtr_=NULL;
};
int main(int argc,char** argv)
{
ros::init(argc,argv, "camera_split");
CameraSplitter cameraSplitter;
ros::spin();
return 0;
}
5.����launch�ļ�
camera_split_no_calibration.launch
<launch>
<node pkg="camera_split" type="camera_split_node" name="camera_split_node" output="screen" />
<node pkg="image_view" type="image_view" name="image_view_left" respawn="false" output="screen">
<remap from="image" to="/left_cam/image_raw"/>
<param name="autosize" value="true" />
</node>
<node pkg="image_view" type="image_view" name="image_view_right" respawn="false" output="screen">
<remap from="image" to="/right_cam/image_raw"/>
<param name="autosize" value="true" />
</node>
</launch>
6.�������
cd catkin_ws
catkin_make
source ./devel/setup.bash
roslaunch camera_split camera_split_no_calibration.launch
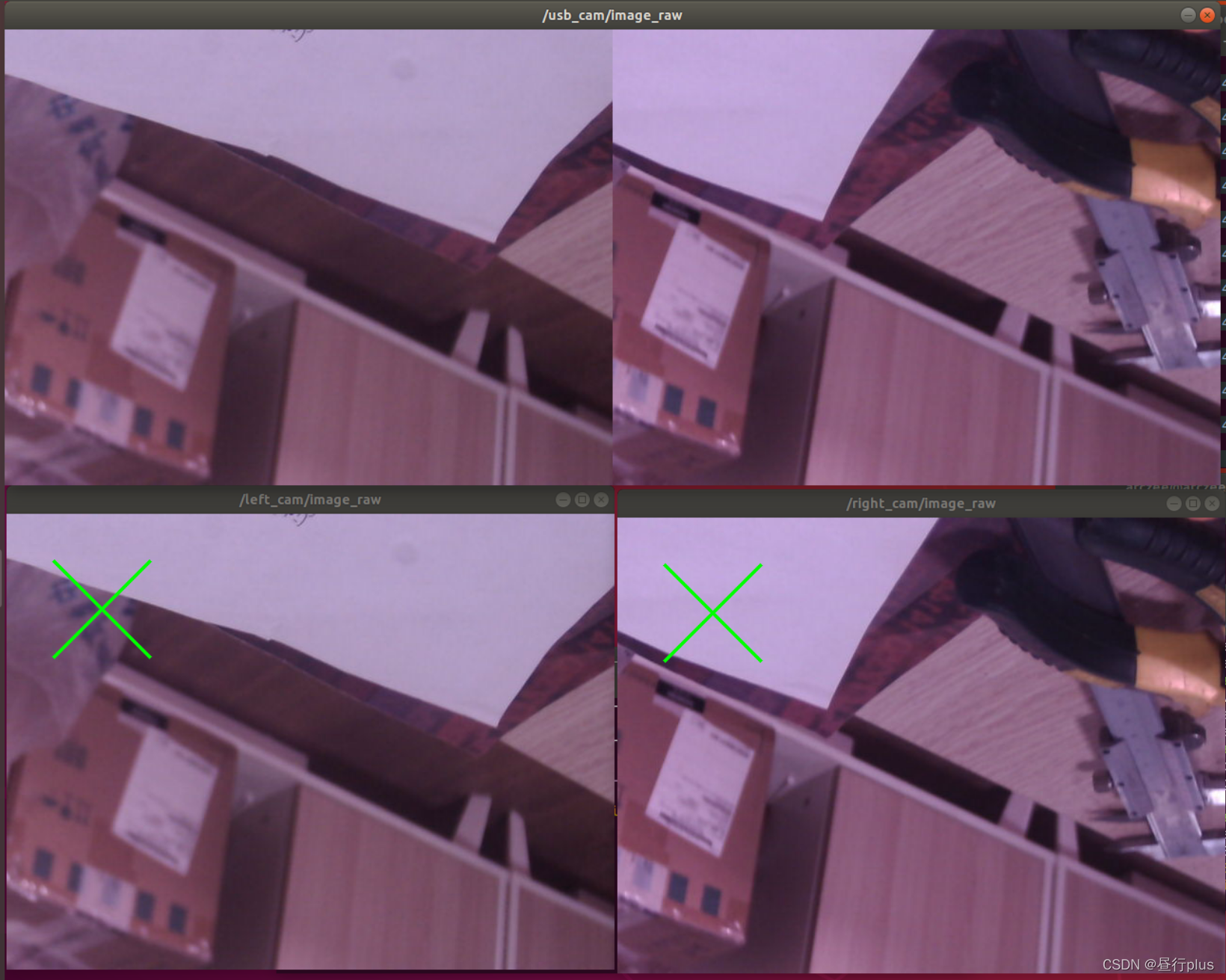
Ȼ�������ܿ������¾���������ͼ��Ч����:
�ο�:
ROS�µ�Ŀ����ͷ��Calibration
��ROSʵ������(��)ROSʹ��USB�Ӿ������������