论文名称:A non-local algorithm for image denoising
????????05年的论文,比较老的算法,但也比较有代表性。 论文比较好理解,就是认为图像内部有很多相似的块,只要进行块间相似性匹配,如果差异比较小,权重就比较大,差异比较大,权重就比较小,根据相似性进行加权平均,得到滤波后的结果。算法对均值为0的高斯噪声效果较好。由于好理解,就直接贴论文核心部分。

 ?
?
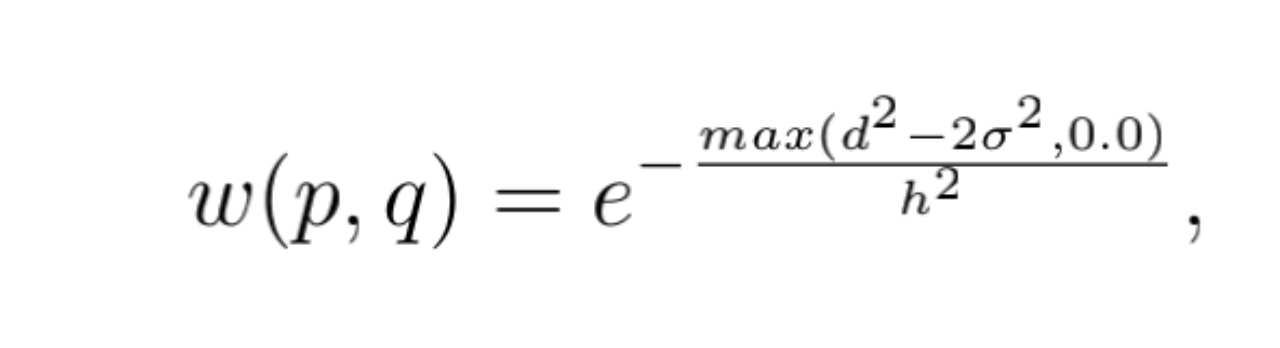
????????用欧式距离进行块间匹配,差异越小,权重越大,由于图像是有噪声的,所以即使没有噪声的两个块是完全一样的,由于噪声的存在,导致计算出的欧式距离不为0,其期望大概为2*σ2。所以最后在算权重时,需要多减去2*σ2。
?
参该网站上提供的代码,用Python重写了,运行速度很慢,用分辨率低的图做测试比较好。IPOL Journal ・ Non-Local Means Denoising![]() https://www.ipol.im/pub/art/2011/bcm_nlm/?
https://www.ipol.im/pub/art/2011/bcm_nlm/?
import cv2
import os
import numpy as np
def AddGaussNoise(img, sigma, mean=0):
# 大概率abs(noise) < 3 * sigma
noise = np.random.normal(mean, sigma, img.shape)
img = img.astype(np.float)
img = img + noise
img = np.clip(img, 0, 255)
img = img.astype(np.uint8)
return img
def AddGaussNoiseGray(img, sigma, mean=0):
lab = cv2.cvtColor(img, cv2.COLOR_BGR2Lab)
noise = np.random.normal(mean, sigma, lab[:, :, 0].shape)
lab = lab.astype(np.float)
lab[:, :, 0] = lab[:, :, 0] + noise
lab[:, :, 0] = np.clip(lab[:, :, 0], 0, 255)
lab = lab.astype(np.uint8)
img = cv2.cvtColor(lab, cv2.COLOR_Lab2BGR)
return img
def GetMeandiff(patch1, patch2):
# patch1 = patch1.astype(float)
# patch2 = patch2.astype(float)
diff = patch1 - patch2
diff = diff.flatten()
diff = diff * diff
diffmean = diff.mean()
return diffmean
def CalculateWeightLut(sigma, h):
weightLut = np.zeros((256 * 256), np.float)
sigma2 = sigma * sigma
h2 = h * h
for i in range(256 * 256):
tmp = -max(i - 2 * sigma2, 0.0) / h2
weightLut[i] = np.exp(tmp)
if weightLut[i] < 0.0001:
break
return weightLut
def NonLocalMeansColor(image, sigma, h, templateWindowSize, searchWindow):
height, width = image.shape[0], image.shape[1]
patchWin = templateWindowSize // 2
searchWin = searchWindow // 2
# Padding the image
padLength = patchWin + searchWin
img = cv2.copyMakeBorder(image, padLength, padLength, padLength, padLength, cv2.BORDER_CONSTANT, value=255)
img = img.astype(np.float)
tmpSum = np.zeros((height + 2 * padLength, width + 2 * padLength, 3), np.float)
count = np.zeros((height + 2 * padLength, width + 2 * padLength, 3), np.int)
weightLut = CalculateWeightLut(sigma, h)
for j in range(height):
for i in range(width):
padj = j + padLength
padi = i + padLength
centerPatch = img[padj - patchWin: padj + patchWin + 1, padi - patchWin: padi + patchWin + 1, :]
# print(centerPatch.shape)
sumWeight = 0
templatePixel = np.zeros((templateWindowSize, templateWindowSize, 3), np.float)
for r in range(padj - searchWin, padj + searchWin):
for c in range(padi - searchWin, padi + searchWin):
otherPatch = img[r - patchWin: r + patchWin + 1, c - patchWin: c + patchWin + 1, :]
diff = GetMeandiff(centerPatch, otherPatch)
diff = (int)(diff)
curWeight = weightLut[diff]
sumWeight += curWeight
templatePixel += otherPatch * curWeight
if sumWeight > 0.0001:
tmpSum[padj - patchWin: padj + patchWin + 1, padi - patchWin: padi + patchWin + 1, :] += templatePixel / sumWeight
count[padj - patchWin: padj + patchWin + 1, padi - patchWin: padi + patchWin + 1] += 1
outImg = tmpSum[padLength:padLength + height, padLength:padLength + width, :]
outCnt = count[padLength:padLength + height, padLength:padLength + width, :]
mask = outCnt > 0
outImg = outImg * mask + image * (1 - mask)
outCnt = outCnt * mask + 1 - mask
outImg = outImg / outCnt
outImg = np.clip(outImg, 0, 255)
outImg = outImg.astype(np.uint8)
return outImg
if __name__ == '__main__':
img = cv2.imread('test3.jpg', 1)
# img = cv2.resize(img, (600, 750//2), interpolation=cv2.INTER_AREA)
print(img.shape)
noiseImg = AddGaussNoise(img, 20, 0)
denoise = NonLocalMeansColor(noiseImg, 20, 8, 5, 15)
cv2.imwrite('test_gauss_noise_color.jpg', noiseImg)
cv2.imwrite('test_gauss_denoise_color.jpg', denoise)
denoisecv = cv2.fastNlMeansDenoisingColored(noiseImg, None, 10, 10, 5, 15)
cv2.imwrite('test_gauss_noise_colorcv.jpg', denoisecv)
代码里写的只能处理三通道的彩色图,处理灰度图的话,需要仿造写个函数。运行效果如下,sigma为20的高斯噪声。

噪声图像,sigma=20

去噪效果

fastNlMeansDenoisingColored运行的结果
可以看到,对高斯噪声,已知sigma的情况下,去噪效果还是比较好的,OpenCV自带的部分区域噪声没有去干净,可能和参数有关,他们用的是快速算法,参数也不一样,下次再研究一下。