目录
1、摄像机坐标系下的三维点至像素坐标系的映射
????????这里将的焦距为摄像机的焦距。真实世界里我们得到的是数字图像(以像素为单位),像平面本身仍为连续的(以米为单位)。我们最终拿到的图像,为像素。像素平面坐标系为x-y,像平面坐标系(xc-yc)以中心为原点,如下图:
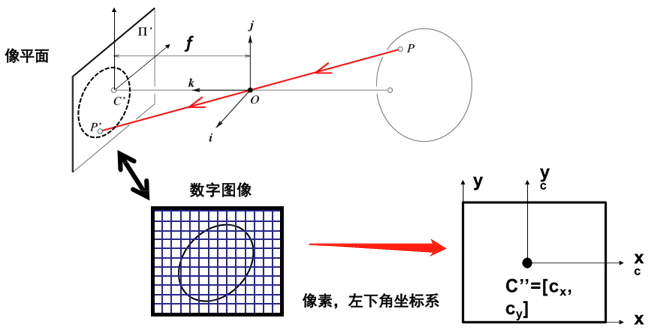
摄像机坐标系下一个三维点P到像素平面映射为:
1、偏置
????????像素平面坐标系远点在左下角,像平面坐标原点在成像平面中心,其相对x-y坐标系,增加偏置cx,cy。cx,cy为像素坐标系,图像的中心点。
![]()
2、单位转换
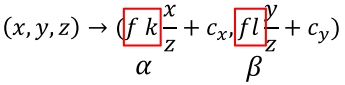
????????像平面单位为m(米),像素平面单位为pixel(像素),所以像平面坐标需通过一个转换量转为像素坐标。这个转换量的单位为piexl/m,与成像元器件有关,焦距f的单位为m,cx、cy为以像素为单位的偏置,式子右边单位为像素。
![]()
????????做好一个相机后,f和k、l均为固定值,所以上面式子可以合并为:
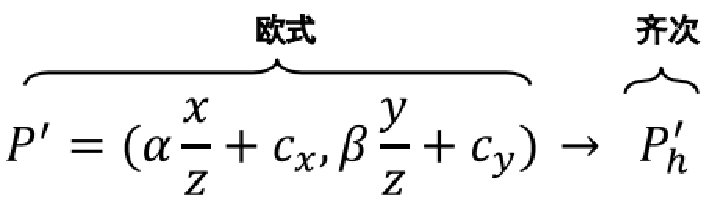
????????最终可得,相机坐标系下,一个三维点到像素平面的映射关系为:
![]()
问题1、P到P`的变换是线性吗?
????????不是,因为x,y的系数,a/z、b/z不是常数,所以不是线性变换。
2、齐次坐标
E->H(欧式空间->齐次空间):
????????低维坐标增加一维,变为齐次坐标。特点:一一对应。
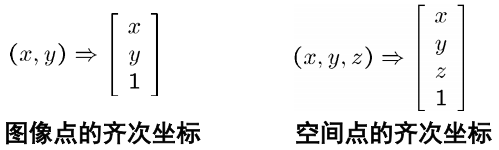
H->E(齐次空间->欧式空间):
????????除于最后一维数字,减少一维,变为欧式坐标。特点:不是一一对应的,相差一个系数。

3、齐次坐标系中的投影变换
????????将欧式空间点的表示方式,转换到齐次坐标系下。
????????则Ph`可用矩阵形式表示为:

????????Ph`除以第三维z减少一维可得P`,P`乘以第三维z,增加一维可得Ph`,所以这两个为齐次坐标与欧式坐标的转换关系。
????????这里坐标前面的系数矩阵是个固定值,所以,齐次坐标将三维空间的点映射至二维变为一个线性变换,这样就会带来数学上的计算的方便。
????????所以,后面没有特殊说明时,使用的坐标均采用齐次坐标表示。坐标替换:Ph`->P`,Ph->P,不再使用h下标。摄像机的投影矩阵可表示为:
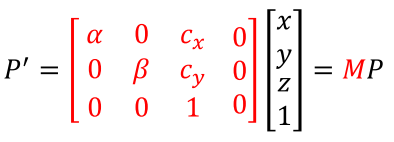
4、摄像机偏斜
????????由于制作工艺的问题,有的时候像素不是方的,像素的两个夹角theta不是90度。相平面是垂直的,像素平面是不完全垂直。这时,相机坐标系下三维点到像素平面的映射关系表示为:
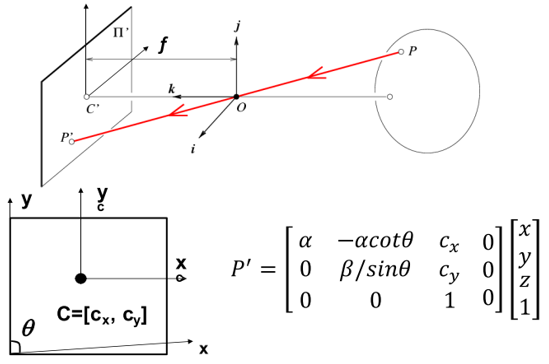
????????所以,摄像机坐标系下的摄像机模型定义为:
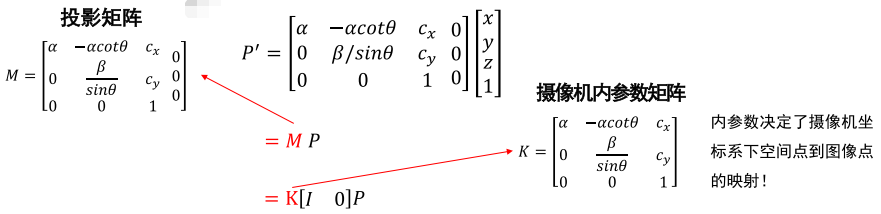
????????M矩阵成为投影矩阵,大小为3*4;K为相机内参矩阵,大小为3*3,内参矩阵工5个自由度。