随着新一轮科技革命和产业变革的加速演进,5G、人工智能、物联网等基础设施日趋完善,无人驾驶、无人机、VR/AR等终端应用技术商业化规模快速增长,而连接新一代信息技术的基础技术与终端应用的――以MEMS为核心的智能传感器,正处于爆发阶段。MEMS传感器的设计与制造依赖大规模微纳制造技术,基于此,深圳市微纳制造产业促进会开展MEMS微纳制造系列调研,通过对核心器件市场应用的研究,分析其背后微纳制造技术的应用,从而促进微纳制造技术的应用及推广。
本期简报我们从惯性测量单元(IMU)传感器的应用说起。
从JDAM制导炸弹说起
今年五月份爆发的巴以冲突,再一次向世人展示了现代战争的可怕威力。以色列空军战机向加沙地带一幢十四层高的大楼发射两枚导弹,就将整幢大楼完全炸平了,是什么技术让这导弹能如此精确制导?确切说这并不是导弹,而是美国研制的联合直接攻击弹药(Joint Direct Attack Munition,字母简称JDAM)。JDAM制导炸弹采用自主式的卫星定位和惯性导航的复合式制导,其中制导控制部件(GCU)是JDAM制导炸弹的核心部件,包括GPS接收机、惯性测量单元(IMU)、任务计算机和电源模块。而IMU又是核心中的核心。
惯性测量单元(Inertial measurement unit,简称IMU)是测量物体三轴姿态角(或角速率)以及加速度的装置。IMU的核心装置是陀螺仪和加速度计。通常情况下,每套惯性测量装置包含三组陀螺仪和加速度计,分别测量三个自由度的角加速度和线加速度,通过对加速度的积分和初始速度、位置的叠加运算,得到物体在空间位置中的运动方向和速度,结合惯性导航系统内的运动轨迹设定,对航向和速度进行修正以实现导航功能。
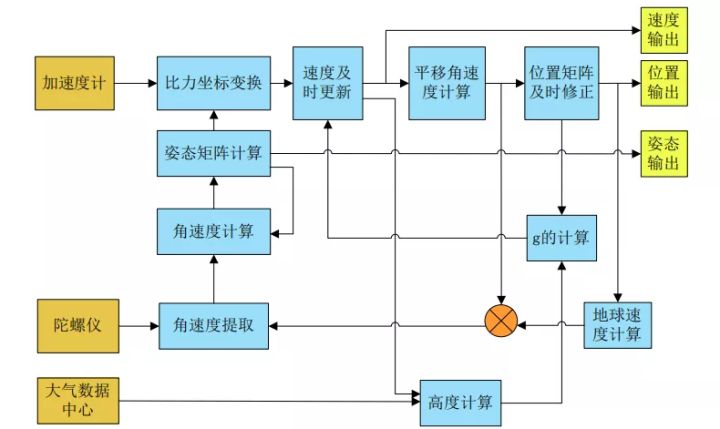
▲图:惯性导航系统工作原理图
IMU消费级应用爆发
根据应用场景和精度要求不同,可以将惯性导航所需陀螺仪器件分为战略级、导航级、战术级和商业级(消费级):
1、战略级应用场景集中于航天和航海领域;
2、导航级应用场景多为各类导弹武器;
3、战术级应用场景包括地面兵装武器和飞行器;
4、商业级应用场景为民用。
惯性技术发展之初主要用于国防军工领域,高精度、高灵敏度是面向军工惯性技术产品的主要特征。因此国外对高精度惯性技术和器件严密封锁、对任何国家都是禁运的。

▲图:惯性导航系统应用场景 (来源:中信建投证券)
随着技术进步,中低精度的惯性器件发展迅猛,其成本逐步降低,体积逐步减小,惯性技术在民用领域也开始得到应用,并为越来越多的行业所了解。尤其微机电惯性器件(MEMS IMU)大规模生产的实现,使得在较低精度即可满足应用需求的民用领域,惯性技术产品开始得到广泛使用,目前应用领域与规模正呈现快速增长的态势。下面列举分析几个IMU的重要应用市场。
惯性导航――自动驾驶核心中的核心
自动驾驶的核心包括定位、感知、决策、执行四个部分,其中定位是决策和执行的前提。定位系统主要作用是确定车辆所处的绝对位置;感知层的主要作用是收集和解析出周围环境的信息;决策层基于对当前位置和周围环境的理解,做出实时的安全有效的执行计划;执行层则是按照决策层的计划进行。
定位系统主要是以高精地图为依托,通过惯性传感器(IMU)和全球定位系统(GNSS),来精确定位车辆所处绝对位置。惯性导航是不可替代的关键定位技术,将成为自动驾驶定位信息融合的中心。IMU具有输出信息不间断、不受外界干扰等独特优势,可保证在任何时刻以高频次输出车辆运动参数,为决策中心提供连续的车辆位置、姿态信息,这是任何传感器都无法比拟的。
惯性导航系统在自动驾驶中的应用属于起步阶段,短期内竞争力主要体现在算法上。算法包括了MEMS惯性传感器的标定等硬件信息的处理,速度、加速度、航向及姿态的确定,以及与其他传感器信息、车身信息的融合等主要模块。算法的优劣决定传感器是否能发挥其最佳性能,也决定了惯性导航系统的稳定性和可靠性。
从长远看,惯性导航系统的竞争力在惯性传感器芯片。随着自动驾驶技术级别的提升,对MEMS惯性传感器芯片的性能要求将持续提高;同时随着惯性导航系统算法的不断成熟,通过算法优化来提升系统性能的空间越来越小,而对惯性传感器芯片硬件性能的依赖程度则会相应提高。MEMS惯性传感器芯片的设计、制造、封测及标定将成为惯性导航系统中比较关键的环节。
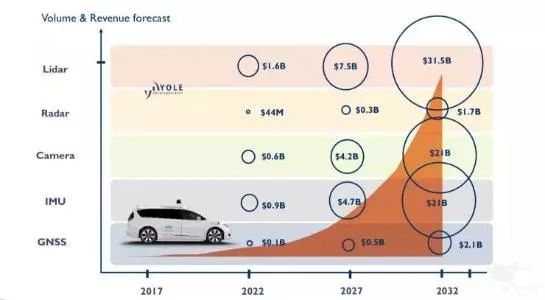
▲图:无人驾驶市场规模预测(来源:Yole)
无人机
通过利用惯性器件及捷联惯性导航技术,可以为无人机提供精确的速度、位置和姿态等信息,从而实现其精确的导航定位和姿态控制。目前无人机在军事领域的应用最为成熟,同时随着人们对无人机认知程度的加深,其在遥感测绘、边海防、森林防火、管道巡线、应急救灾、警务执法等民用领域呈现出迅猛的发展态势。
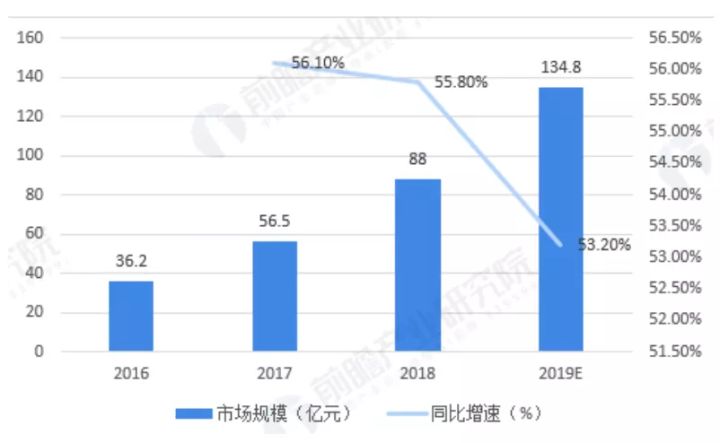
▲图:2016-2019年中国民用无人机市场规模及增速(来源:前瞻产业研究院)
我国民用无人机市场将继续保持高速增长。根据前瞻产业研究院数据,2019年中国民用无人机销售规模为134.8亿元,同比增长53.2%,近三年增速始终维持在50%以上,预计到2025年,我国民用无人机市场规模将达到560亿元,平均增速将在30%左右,各应用领域也将逐渐形成规模化的市场,发展前景良好;其中,航拍及娱乐仍是最大的应用领域,市场规模有望达300亿元。未来无人机领域的惯性导航产品将充分受益于无人机市场的高速增长,成为民用市场重要增长点之一。
VR/AR
VR/AR带给用户的沉浸感和真实感,也源于IMU的精度提高。在IMU刷新率和显示刷新率同步提高的今天,VR内容得以实时适配头部和身体的敏捷移动和旋转,让用户察觉不到延迟和卡顿,进而减少晕车感。
根据国际数据分析公司IDC的数据,2020年全球VR头显出货量达670万台,较2019年增长72%,AR眼镜出货量40万台,增长33%。2021年预计国内VR产业在消费端迎来变量和拐点,AR产业也将看到新的突破。
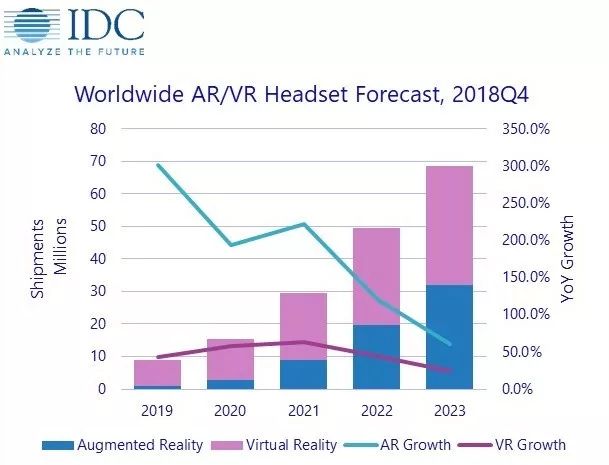
▲图:AR/VR产业发展预测
IMU市场格局
全球惯性技术开发分为四个层次,目前我国居第三层次,具备部分研发能力。根据美国国防部的统计数据,美国防部把从事惯性技术领域研究和开发的国家分为4个层次:属于第一层次的有美国、英国和法国,完全具备自主研究和开发惯性技术能力;属于第二层次的有俄罗斯、德国、以色列和日本,具备大部分自主研发能力;属于第三层次的有中国、澳大利亚、加拿大、瑞典、乌克兰,具备部分研发能力;属于第四层次的有韩国、印度、巴西、朝鲜、瑞士、意大利等,具备较为有限的惯性技术研发能力。

▲图:全球惯性技术企业和科研机构分布(来源:中信建投证券)
美国的霍尼韦尔、诺格和法国的赛峰为全球惯性技术领域顶尖公司。目前,美国主要的惯性导航技术公司包括:霍尼韦尔、诺格公司、大西洋惯性系统、亚诺德半导体(ADI)和吉尔福特等;法国主要的惯性导航技术公司包括赛峰、iXblue、泰雷兹集团等。其他国家主要的惯性技术公司包括:英国BAE系统公司;德国博世公司;俄罗斯物理光学、陀螺仪光学、拉明斯克仪表厂和Optolink;日本航空电子工业、三菱精密;挪威Sensonor等。
在专利申请及发文数量方面,据Yole发布的陀螺仪专利报告,美国、日本、德国、欧专局、法国等国家/机构的激光陀螺仪领域研究发文数量占总数量的近75%。德国博世公司 MEMS陀螺仪专利申请最多,行业龙头占据了陀螺仪大部分核心基础专利。
美国电气和电子工程师协会(IEEE)迄今制定了约十余项惯性技术基础及仪表标准。基本涵盖了惯性技术核心产品和通用技术,成为美国事实国家标准。
目前,我国已具备研制生产高、中、低精度不同惯性仪表及系统的能力和条件,可生产的陀螺仪包括气浮、液浮、挠性、静电到激光、光纤、MEMS以及原子陀螺仪。但是,与国外目前主流应用陀螺仪――包括光学陀螺仪(激光、光纤)和MEMS陀螺仪相比,在精度、可靠性等指标仍有一定差距。
MEMS制造之困
IMU的核心器件陀螺仪与加速计的MEMS制造在工业应用领域都形成替代趋势。
MEMS技术基于已经相当成熟的微电子技术、集成电路技术及其加工工艺。它与传统的IC工艺有许多相似之处,如光刻、薄膜沉积、掺杂、刻蚀、化学机械抛光工艺等,但是有些复杂的微结构难以用IC工艺实现,必须采用微加工技术制造。
微加工技术包括硅的体微加工技术、表面微加工技术和特殊微加工技术。体加工技术是指沿着硅衬底的厚度方向对硅衬底进行刻蚀的工艺,包括湿法刻蚀和干法刻蚀,是实现三维结构的重要方法。表面微加工是采用薄膜沉积、光刻以及刻蚀工艺,通过在牺牲层薄膜上沉积结构层薄膜,然后去除牺牲层释放结构层实现可动结构。

▲图:MEMS制造共性工艺、特殊工艺及最终产品(来源:上海微技术工研院)
目前我国产线仅能制备以压力传感器、MEMS麦克风、加速度计等为主的低端产品,制造工艺水平与国际领先代工厂的差距明显,诸如压电材料(AlN、PZT等)等高端制造工艺线尚未建立,无法生产薄膜体声波滤波器、压电式喷墨打印头和超声波传感器等产品。尽管中国MEMS代工厂也拥有体微加工技术、表面微加工技术和CMOSMEMS技术,但由于产品出货量都比较小,因此在量产良率、可靠性和稳定性等方面存在不足。
中国MEMS产业面临的最大问题是:缺乏开放、专业的规模化MEMS代工厂,无法解决众多MEMS设计企业的制造工艺问题。虽然传统的IC代工厂,如中芯国际、华润上华、华虹宏力等开展了MEMS代工业务,但是主要以压力传感器、MEMS麦克风、加速度计等成熟的中低端产品为主,制造工艺水平与国际领先代工厂的差距明显,例如国内还没有成熟的压电MEMS代工服务。同时,苏州、淄博、上海等城市纷纷建设了公共加工平台,如苏州纳米所纳米加工平台、苏州纳米城MEMS中试平台、上海微技术工研院“超越摩尔”研发中试平台、淄博高新区MEMS中试平台等,为MEMS创新创业提供服务支撑,不过量产经验较为匮乏。
 ?
?
产业化建议
国内MEMS陀螺仪的研发均处于工程样机阶段,国外高端陀螺仪对国内禁运,在军事国防、汽车电子等领域有着很好的产业化空间。国外高端器件仍处于禁运状态,若能实现MEMS陀螺仪的批量化生产,经济效益可观,仅以汽车电子为例,我国每年高端车的销售超过数百万辆,高端车均配备微机械陀螺仪,仅此一项的经济效益已足够。
一、加大公共研发、加工平台的建设
MEMS传感器的生产具有规模效应,规模越大,成本越低,竞争力越强。基于国内MEMS传感器市场分散、整体研发实力不强的特点,建立公共加工、中试平台是关键,应加大相关公共研发、加工平台的建设。
二、加强微纳制造技术工艺的应用与推广
高端精密器件的研发和生产,依赖微纳制造技术和工艺。目前新的微纳制造技术如3D打印、激光直写、电子束光刻、纳米压印技术都处于技术不断完善及应用推广阶段,业界应密切关注这些技术的研发和应用。
三、投入专利联盟、专利池建设
在惯性传感器等MEMS传感器领域,我国绝大多数企业属于跟进者。为降低知识产权侵权风险,消除专利实施中的授权障碍,降低获得专利许可的交易成本,建议业内成立专利联盟,建设MEMS传感器专利池。同时企业需要重视MEMS知识产权的战略布局,强化国际交往与合作,扩大国际知识产权交流合作。
参考资料
[1]《惯性导航:以元器件为产业核心,军民应用市场广阔》中信建投证券.20180828
[2]薛连莉,翟峻仪,葛悦涛.2020年国外惯性技术发展与回顾[J].导航定位与授时,2021,8(03):59-67.
[3]《MEMS制造工艺》麦姆斯咨询.2021