ЛөГч:әЬ¶аіЎҫ°ОТГЗРиТӘ¶ФПа»ъөДДЪНвІОКэҪшРРұк¶Ё,¶шіЈУГөДСЎФсКЗmatlabөДөДКУҫхұк¶Ё№ӨҫЯЎЈ
ФЪУГmatlabұк¶ЁКұұКХЯҫӯіЈ¶ФИзНјЛщКҫөДOptionsЦРөДСЎПоёРөҪТЙ»у,І»ЦӘөАёГ№ҙСЎДДР©әПККөДСЎПо,УЪКЗұКХЯІйФДБЛПа№ШЧКБП,№©ҙујТІОҝј!
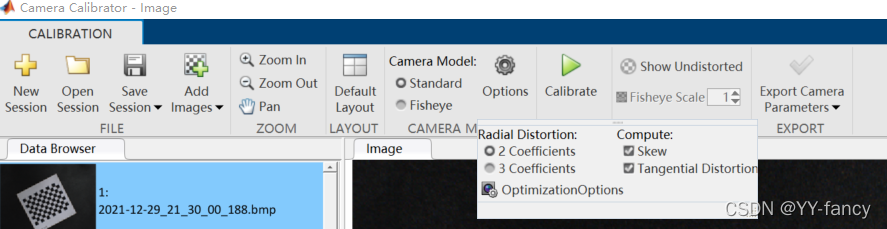
1.ЖдЦРөДRadial Distortion:
Radial Distortion ҫ¶Пт»ыұд
ЖдЦР:
2 CoefficientsСЎПоөД№Щ·Ҫә¬Те:
Use fourth degree polynomial to estimate the radial distortion of a lens.
К№УГЛДҙО¶аПоКҪАҙ№АјЖНёҫөөДҫ¶Пт»ыұдЎЈ
3 CoefficientsСЎПоөД№Щ·Ҫә¬Те:
This setting is recommended only for wide field of view camera.
Use sixth degree polynomial to estimate the radial distortion of a lens.
ҙЛЙиЦГҪцККУГУЪҙуКУіЎПа»ъЎЈ
К№УГБщҙО¶аПоКҪАҙ№АјЖНёҫөөДҫ¶Пт»ыұдЎЈ
ЧЫЙПЛщКц:
¶ФУЪТ»°гөДПа»ъСЎФс2 CoefficientsСЎПојҙҝЙ,¶ФУЪҙуКУіЎПа»ъФтСЎФс3 CoefficientsСЎПоЎЈ
2.ЖдЦРөДCompute:
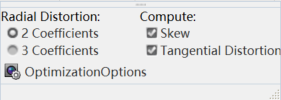
Compute°ьә¬SkewәНTangential DistortionБҪёцСЎПо
2.1№ШУЪSkew
Assume that X-axis and Y-axis are not perpendicular. This means that the image pixels are not rectangular. Most modern cameras do not exhibit this issue.
јЩЙиXЦбәНYЦбІ»ҙ№ЦұЎЈХвТвО¶ЧЕНјПсПсЛШІ»КЗҫШРОөДЎЈҙу¶аКэПЦҙъПа»ъ¶јГ»УРХвёцОКМвЎЈ
ЛщТФ,SkewСЎПоТ»°гІ»РиТӘСЎФсЎЈ

2.2№ШУЪTangential Distortion
Tangential distortion occurs when the lensЎҜ principal axis is not perpendicular to the camera sensor.
өұҫөН·өДЦчЦбУлПа»ъҙ«ёРЖчІ»ҙ№ЦұКұ,»б·ўЙъЗРПтК§ХжЎЈ
