摘要
NeRF 的基本思想是用神经网络作为一个 3D 场景的隐式表达,代替传统的点云、网格、体素、TSDF 等方式,同时通过这样的网络可以直接渲染任意角度任意位置的投影图像。
其主要工作如下:
1)提出一种用 5D 神经辐射场 (Neural Radiance Field) 来表达复杂的几何+材质连续场景的方法,该辐射场使用 MLP 网络进行参数化;
2)提出一种基于经典体素渲染 (Volume Rendering) 改进的可微渲染方法,能够通过可微渲染得到 RGB 图像,并将此作为优化的目标。该部分包含采用分层采样的加速策略,来将 MLP 的容量分配到可见的内容区域;
3)提出一种位置编码 (Position Encoding) 方法将每个 5D 坐标映射到更高维的空间,这样使得我们可以让我们优化神经辐射场更好地表达高频细节内容。

pipeline
我的理解:
对于某张图的一个像素,从该像素发射ray,在这条ray上采样,每个点的5D参数送入MLP训练,输出是该点的颜色和体密度。
然后该条ray上的所有点进行累加(就是经典体素渲染ray-casting的方法),就可以得到原图像的该像素的颜色。
渲染后像素的颜色-原图像素的颜色的残差,采用梯度下降的方法,进行训练
最终训练好的网络,可以输入一个图像的pose,输出该pose下的图像

1 Neural Radiance Field Scene Representation (基于神经辐射场的场景表示)
NeRF 将一个连续的场景表示为一个 5D 向量值函数(vector-valued function),其中:
- 输入为:3D 位置 x = ( x , y , z ) \pmb{x}=(x,y,z) xxx=(x,y,z)和 2D 视角方向 ( θ , ? ) (\theta, \phi) (θ,?)
- 输出为:发射颜色 c=$(r,g,b) $和体积密度 σ。
在实际实现中,视角方向表示为一个三维笛卡尔坐标系单位向量
d
d
d\pmb{d}
dddd,我们用一个 MLP 全连接网络表示这种映射:
F
Θ
:
(
x
,
d
)
→
(
c
,
σ
)
F_Θ:(\pmb{x},\pmb{d})→(\pmb{c},σ)
FΘ?:(xxx,ddd)→(ccc,σ) ―― (1)
通过优化这样一个网络的参数 Θ 来学习得到这样一个 5D 坐标输入到对应颜色和密度输出的映射。
为了让网络学习到多视角的表示,我们预测体积密度σ 的网络部分输入仅仅是输入位置 x,而预测颜色 c 的网络输入是视角和方向
d
d
d\pmb{d}
dddd。在具体实现上:
1)MLP 网络
F
Θ
F_Θ
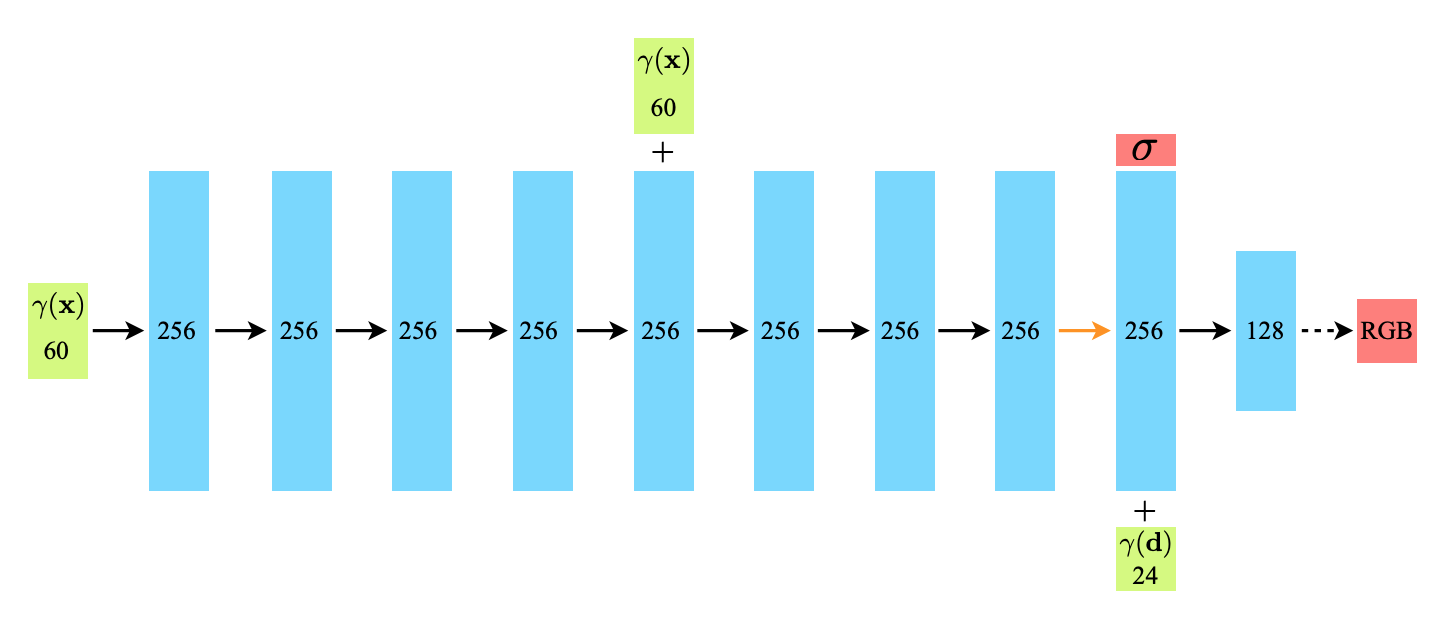
FΘ? 首先用 8 层的全连接层(使用 ReLU 激活函数,每层有 256 个通道),处理 3D 坐标x,得到 σ 和一个 256 维的特征向量。
2)将该 256 维的特征向量与视角方向与
d
d
d\pmb{d}
dddd 视角方向一起拼接起来,喂给另一个全连接层(使用 ReLU 激活函数,每层有 128 个通道),输出方向相关的 RGB 颜色。
本文中一个示意的网络结构如下:
其中: γ \gamma γ 表示从 R \mathbb{R} R到更高维 R 2 L \mathbb{R}^{2 L} R2L的编码函数
(神经网络倾向于学习到频率较低的函数。而通过将输入通过高频函数映射到高维空间中,可以更好地拟合数据中的高频信息。)
2 Volume Rendering with Radiance Fields (基于辐射场的体素渲染)
2.1 经典的体素渲染方法
我们的 5D 神经辐射场将场景表示为:其所在空间中任意点的体素密度和有方向的辐射亮度。
体素密度 σ ( x ) \sigma(\mathbf{x}) σ(x)定义为光线停留在位置 x \mathbf{x} x 处无穷小粒子的可导概率(或者也可以理解为光线穿过此点后终止的概率)。使用经典的立体渲染的原理,我们可以渲染出任意射线穿过场景的颜色。
因此对于某个视角
o
\mathbf{o}
o 发出的方向为
d
\mathbf{d}
d 的光线,其在 t 时刻到达点为:
KaTeX parse error: \tag works only in display equations ―― (2)
那么沿这个方向在范围
(
t
n
,
t
f
)
(t_n, t_f)
(tn?,tf?)对颜色积分,获得最终的颜色值
C
(
r
)
C(\mathbf{r})
C(r) 为:
C
(
r
)
=
∫
t
n
t
f
T
(
t
)
σ
(
r
(
t
)
)
c
(
r
(
t
)
,
d
)
d
t
,
?where?
T
(
t
)
=
exp
?
(
?
∫
t
n
t
σ
(
r
(
s
)
)
d
s
)
C(\mathbf{r})=\int_{t_{n}}^{t_{f}} T(t) \sigma(\mathbf{r}(t)) \mathbf{c}(\mathbf{r}(t), \mathbf{d}) d t, \text { where } T(t)=\exp \left(-\int_{t_{n}}^{t} \sigma(\mathbf{r}(s)) d s\right)
C(r)=∫tn?tf??T(t)σ(r(t))c(r(t),d)dt,?where?T(t)=exp(?∫tn?t?σ(r(s))ds)
―― (3)
函数 T(t) 表示光线从 t n t_n tn? 到 t t t 累积的透明度 (Accumulated Transmittance)。换句话说,就是光线从 t n t_n tn? 到 t t t 穿过没有碰到任何粒子的概率。按照这个定义,视图的渲染就是表示成对于 C ( r ) C(\mathbf{r}) C(r)的积分,它是就是虚拟相机穿过每个像素的相机光线,所得到的颜色。
不过在实际的渲染中,我们并不能进行连续积分,我们使用求积法(quadrature)进行积分的数值求解。通过采用分层采样 (stratified sampling) 的方式对
[
t
n
,
t
f
]
\left[t_{n}, t_{f}\right]
[tn?,tf?]划分成均匀分布的小区间,对每个区间进行均匀采样,划分的方式如下:
t
i
~
U
[
t
n
+
i
?
1
N
(
t
f
?
t
n
)
,
t
n
+
i
N
(
t
f
?
t
n
)
]
t_{i} \sim \mathcal{U}\left[t_{n}+\frac{i-1}{N}\left(t_{f}-t_{n}\right), t_{n}+\frac{i}{N}\left(t_{f}-t_{n}\right)\right]
ti?~U[tn?+Ni?1?(tf??tn?),tn?+Ni?(tf??tn?)] ―― (4)
对于采样的样本,我们采用离散的积分方法:
C
^
(
r
)
=
∑
i
=
1
N
T
i
(
1
?
exp
?
(
?
σ
i
δ
i
)
)
c
i
,
?where?
T
i
=
exp
?
(
?
∑
j
=
1
i
?
1
σ
j
δ
j
)
\hat{C}(\mathbf{r})=\sum_{i=1}^{N} T_{i}\left(1-\exp \left(-\sigma_{i} \delta_{i}\right)\right) \mathbf{c}_{i}, \text { where } T_{i}=\exp \left(-\sum_{j=1}^{i-1} \sigma_{j} \delta_{j}\right)
C^(r)=∑i=1N?Ti?(1?exp(?σi?δi?))ci?,?where?Ti?=exp(?∑j=1i?1?σj?δj?) ―― (5)
其中, δ i = t i + 1 ? t i \delta_{i}=t_{i+1}-t_{i} δi?=ti+1??ti?是相邻样本之间的距离。
下图非常形象地演示了体素渲染的流程:
3 Optimizing a Neural Radiance Field (优化一个神经辐射场)
上述方法就是 NeRF 的基本内容,但基于此得到的结果并能达到最优效果,存在例如细节不够精细、训练速度较慢等问题。为了进一步提升重建精度和速度,我们还引入了下面两个策略:
- Positional Encoding (位置编码):通过这一策略,能够使得 MLP 更好地表示高频信息,从而得到丰富的细节;
- Hierarchical Sampling Procedure (金字塔采样方案):通过这一策略,能够使得训练过程更高效地采样高频信息。
3.1 Positional Encoding (位置编码)
尽管神经网络理论上可以逼近任何函数,但是通过实验发现仅用 MLP 构成的 F Θ F_{\Theta} FΘ? 处理输入$ (x, y, z, \theta, \phi)$ 不能够完全表示出细节。这和 Rahaman 等人工作(《On the spectral bias of neural networks. In: ICML (2018) 》)所证明的结论相符,即:神经网络倾向于学习到频率较低的函数。同时他们的工作也表明,通过将输入通过高频函数映射到高维空间中,可以更好地拟合数据中的高频信息。
通过这些发现应用到神经网络场景表达任务中,我们将 F Θ F_{\Theta} FΘ? 修改成两个函数的组合: F Θ = F Θ ′ ° γ F_{\Theta}=F_{\Theta}^{\prime} \circ \gamma FΘ?=FΘ′?°γ,通过这样的方式可以明显提升细节表达的性能,其中:
- γ \gamma γ 表示从 R \mathbb{R} R 到更高维 R 2 L \mathbb{R}^{2 L} R2L 的编码函数
- F Θ ′ F_{\Theta}^{\prime} FΘ′? 是正常的 MLP 网络
本文使用的编码函数如下:
KaTeX parse error: Expected 'EOF', got '}' at position 158: …p\right)\right)}? ―― (6)
该函数 γ ( ? ) \gamma(\cdot) γ(?)会应用于三维位置坐标 x \mathbf{x} x (归一化到 [-1, 1] )和三维视角方向笛卡尔坐标 d \mathbf{d} d 。
在本文中对于 γ ( x ) \gamma(\mathbf{x}) γ(x)设置 L=10;对于 γ ( d ) \gamma(\mathbf{d}) γ(d) 设置 L=4。
相似地,在 Transformer 中也有一个类似的位置编码操作,不过本文中与其还是根本不同。在 Transformer 中位置编码是用来表示输入的序列信息的,而这里的位置编码是做用于输入将输入映射到高维从而让网络能够更好地学习到高频信息。
3.2 Hierarchical Sampling Procedure (分层采样方案)
分层采样方案来自于经典渲染算法的加速工作,在前述的体素渲染 (Volume Rendering) 方法中,对于射线上的点如何采样会影响最终的效率,如果采样点过多计算效率太低,采样点过少又不能很好地近似。那么一个很自然的想法就是希望对于颜色贡献大的点附近采样密集,贡献小的点附近采样稀疏,这样就可以解决问题。基于这一想法,NeRF 很自然地提出由粗到细的分层采样方案(Coarse to Fine)。

Coarse 部分:首先对于粗网络,我们采样 N c N_c Nc? 个稀疏点(c 表示 Coarse),并将公式 (3) 用新的形式修改(加入权重):
原公式:

加入权重后:
C ^ c ( r ) = ∑ i = 1 N c w i c i , w i = T i ( 1 ? exp ? ( ? σ i δ i ) ) \hat{C}_{c}(\mathbf{r})=\sum_{i=1}^{N_{c}} w_{i} c_{i}, \quad w_{i}=T_{i}\left(1-\exp \left(-\sigma_{i} \delta_{i}\right)\right) C^c?(r)=∑i=1Nc??wi?ci?,wi?=Ti?(1?exp(?σi?δi?)) ―― (7)
其中权重需要进行归一化: w ^ i = w i ∑ j = 1 N c w j \hat{w}_{i}=\frac{w_{i}}{\sum_{j=1}^{N_{c}} w_{j}} w^i?=∑j=1Nc??wj?wi??
这里面的权重 w ^ i \hat{w}_{i} w^i? 可以看成沿着射线的分段常数概率密度函数 (Piecewise-constant PDF)。通过这个概率密度函数可以粗略地得到射线上物体的分布情况。

Fine 部分:在第二阶段,我们使用逆变换采样 (Inverse Transform Sampling),根据上面的分布采样出第二个集合 N f N_f Nf? ,最终我们仍然使用公式 (3) 来计算 C ^ f ( r ) \hat{C}_{f}(\mathbf{r}) C^f?(r) 。但不同的是使用了全部的 N c + N f N_c + N_f Nc?+Nf? 个样本。使用这种方法,第二次采样可以根据分布采样更多的样本在真正有场景内容的区域,实现了重要性抽样 (Importance Sampling)。
如图所示,白色点为第一次均匀采样的点,通过白色均匀采样后得到的分布,第二次再根据分布对进行红色点采样,概率高的地方密集,概率低的地方稀疏 (很像粒子滤波)。
3.3 Implementation Details (实现细节)
在训练损失函数方面,本文的定义非常简单直接,就是对于粗网络和精网络都用渲染的
L
2
L_2
L2? Loss,公式如下:(同时优化coarse 和 fine)
L
=
∑
r
∈
R
[
∥
C
^
c
(
r
)
?
C
(
r
)
∥
2
2
+
∥
C
^
f
(
r
)
?
C
(
r
)
∥
2
2
]
\mathcal{L}=\sum_{\mathbf{r} \in \mathcal{R}}\left[\left\|\hat{C}_{c}(\mathbf{r})-C(\mathbf{r})\right\|_{2}^{2}+\left\|\hat{C}_{f}(\mathbf{r})-C(\mathbf{r})\right\|_{2}^{2}\right]
L=∑r∈R?[∥∥∥?C^c?(r)?C(r)∥∥∥?22?+∥∥∥?C^f?(r)?C(r)∥∥∥?22?] ―― (9)
其中:
- R \mathcal{R} R表示一个 batch 中的所有采样的射线集合
- C ( r ) C(\mathbf{r}) C(r)表示真值的 RGB 颜色
- C ^ c ( r ) \hat{C}_{c}(\mathbf{r}) C^c?(r) 表示 Coarse 网络预测的 RGB 颜色
- C ^ f ( r ) \hat{C}_{f}(\mathbf{r}) C^f?(r) 表示 Fine 网络预测的 RGB 颜色