ij�����˻�Ⱥ�ļ��Ӹ�������·�滮

��Դ:���������ѧ��Ӧ�á�?,���������͵�
�ؼ���:?���˻�Ⱥ;���Ӹ��Ǻ�·�滮;�Ŵ��㷨;�˹��Ƴ���;UAV Group;?Surveillance Coverage Route Planning;?Genetic Algorithm;?Artificial Potential Field Method
ժҪ:?�������˻�Ⱥִ�м�������,�ڱ߽������ܿء����ַ��������Լ�����Ӧ���о��кܸߵ�Ч�ѱȡ����˻�Ⱥ���Ӹ��Ǻ�·�滮�㷨���������˻�Ⱥ��������Ч�ʺ������ĺ����㷨����ͳ���Ǻ�·�滮�㷨�����ʽ��һ���Կ��Ի���������Բ�,���ַ��������ڼ�����Զ����ɡ���������˻����˹��Ƴ����Ŵ��㷨�ļ��Ӹ��Ǻ�·�滮�㷨,������ʽ��������������ִ���жԿ��Ժõļ��Ӹ��Ǻ�·�����˹��Ƴ����Ļ�����,�������Ƴ������ӱ���Ϊ��Ԫ�鴮��ʽ�Ļ���,ͨ�����桢���졢�ϲ������ӵIJ�������������ʽ�Ķ�����,�Ӷ��滮��ת���١�����ʱ�����̡��Կ��Ժõļ��Ӹ��Ǻ�·�����ͨ���������㷨��������֤,��������㷨��Ч�������˼������Ǻ�·�滮������
1. ����
���˻���·�滮��ָ���ض�Լ��������,Ѱ�Ҵ���ʼ�㵽Ŀ��㲢�������˻�����ָ������Ż���еĺ�·,�ķ�С��·��������ʡ�����˻����еijɱ�,Ҳ���������˻��������ijɹ���,���Ұ�ȫ�Ըߵ�·��Ҳ��������˻��Ĵ���ʡ����Ǻ�·�滮CPP (Coverage Path Planning)��ָҪΪ���˻��滮һ����ͨ�����и���Ȥ�ĵ��·��,�����˻���������滮����Ҫ����Ĺؼ�����֮һ��
����,��2019����״����(COVID-19)Ӱ��,������������´����ж�������,��ɫ�еȶ�����Ҿ��Ӻ;����������˻��Գ����ڵľ�����м���,��ȷ������Ķ����ô�һ��˾�����������в����˻���ƽ̨,�������˻���������,����Ⱥ��Ѱ�ұ��ֳ�֢״���ˡ����ҹ�,���ʡ�ж�������������ʶ���ϵͳ����������������˻����������ߵĶ���,ȫ��λ��Ƕ�,���ܶȼ��,���˻�Ⱥ�ļ��Ӹ�������Ŀǰ�ȽϹ㷺��
������ [1] �������һ�ֻ����Ŵ��㷨�����˻����Ӹ��Ǻ�·�滮�㷨���Լ��Ӹ��Ǻ�·���н�ģ,��������������,���Ƴ����ӱ���ɶ�Ԫ��������������Ӳ���,�����Ŵ��㷨���ɼ��Ӹ��Ǻ�·,���������з��档
������ [2] �������һ�ֻ����Ŵ��㷨�Ķ����˻���·�滮������ͨ�������˻���ת��ǽ��л������,�������˻��ļ��������������Ϊ��Ӧ�Ⱥ���,��������Ӧ���Ŵ�����,����ʵʱ����������������ԭ��,�Զ����˻�Эͬ������ӽ��к�·�滮��
�º��� [3] ֤���˴������Ƕ��������˻�ת����̱�ֱ�߷��й���Ч�ʵ�,�������������������ij��ȺͿ���,��������������е���̷���·������ת��Ϊ������ε���С������⡣���ǰ��ա����ʽ�������㷨,�������ο��ȳ���ʱ,֧��ƽ���߱���һ�����غ�,���˻��ؿ��ȳ���ʱ֧��ƽ���ߵķ�����в��ܻ�����ٵ�ת�����,Ҳ���ܹ��õ���̵ķ���·�̡����ڵ�����������������,��Ҫ������θ̵߳�Լ��������ά��·�滮��
���Ǻ�·�滮�����ڻ��������� [4] [5] [6] �н϶���о�������,�������Щ����Ӧ���ڼ��ӷ������ĸ���·������,����һ�θ��Ǻ�,����ֿ��Ժ�����������Щ·���Ĺ�����,���������������IJ���Ԥ���Ժ�������Ŀ���Ƶ����Ҫ��
����������������������ģ�͵Ļ�����,��������ֵķ���,Ȼ�����˻����Ŵ��㷨�滮���˻�Ⱥ���Ӹ��Ǻ�·��
2. ���ַ���
���ڶ����˻����Ǻ�·�滮,��Ҫ�Ը������˻�����������䡣�ٶ����˻�Ⱥ��?�����˻���һ�����,�������˻���������ָ������Ϊ������������,������������������˻���������ͬ��
2.1. ������������
����Ҫ���ӵ�Ŀ������,��������ȫ���ǡ�������Ҫ��Ŀ���������������,ʹ���ǿ���ͨ����������ڵ�ķ�ʽʵ�ֶ�Ŀ������ĸ���,�������Dz��������ε������������������ʱ��Ҫ�����˻��ܹ���϶�ĸ���Ŀ������ĸ�������,�������˻���̽�ⷶΧ�ڵ����ͶӰ��������ΪԲ�ġ���rΪ�뾶��Բ������,������Ĵ�С��Ҫ�������˻���̽��뾶r�����������,���ǿ��Խ���������ת��Ϊ����ɨ������,��������Ϳ���ʹ������ļ�������ʾ,��ΪA������ҪС�����ͶӰ����Ĵ�С,����Ҫ�����ܵĴ���ͼ1��ʾ,������ı߳�?������Ϊ:
c=2�C��rc=2r
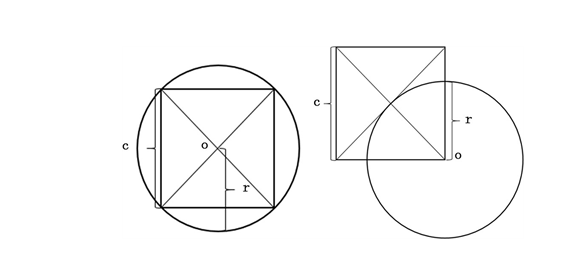
Figure 1. Grid unit distance
ͼ1. ����λ����
2.2. ������������
���ھ�������Ŀ������,���Dz�ȡ��ƽ������ķ�ʽ���������˻����,��n�����˻�,�����������������n�ȷ֡�Ϊ�������˻��IJ���,�������ž��ε�X�᷽����еȷֵķ�ʽ,��ͼ2��ʾ��һ�����,���峤������ΪX�ᡣ
2.3. ��������������
ʵ�������,���������Ŀ�����������Dz��������״��
�˹��Ƴ���?[4] ����Khatib�����һ���������������Ļ���˼���ǽ��ƶ�����������Χ�����е��˶�,��Ƴ�һ�ֳ���������������е��˶�,Ŀ�����ƶ������˲�����������,�ϰ�����������������,���ͨ��������������ƶ������˵��˶������������Ƴ��ĸ����Ŀ��������л���,��Ŀ��������ָ� �����˻�,Ҳ��������������������ͼ�ε���С��Ӿ�����ͼ3��ʾ��
![]()
Figure 2. Rectangle target area partition
ͼ2. ����Ŀ������
![]()
Figure 3. Irregular target region
ͼ3. ������Ŀ������
�����ڲ����������ƽ���ھ��ȷֲ�������ɵĵ�,�����ľ���?c=2�C��rc=2r,ÿ�������ֵΪ0����ļ���ΪS��
������ֵ�ĸ��������������л��ֵIJ�������:
����һ:��������ĵ㼯��S�з�ɢ������n�����ӵ�,�ֱ�����Ϊ?Z1,Z2,?,ZnZ1,Z2,?,Zn,�������������ֵ��Ϊ1,�����������ֵΪ0��
Ϊ�˱������ӵ���ڽ���,�������������ӵ�ľ���?|xmxn||xmxn|?( ����?m<nm<n?),����??|x1x2|<2x0n?|x1x2|<2x0n,�������������ӵ㡣
�����:���еظ�����ֵΪ0���������ֵ,�������ӵ����Ϊ1���ھ������а���һ���Ĺ���,��Щ���������˳ʱ���һ������ʱ���һ�����ϡ��¡����ҡ������,ѡ����ֵΪ���������Ϊ������,���赱ǰ�������ֵΪ��������ֵ + 1��
������:���ν�����?+ 1,���������µ�����;��ijһ�ھ��������ֵ��Ϊ��ʱ,�������������չ��
������:�ظ����в��������ֱ�����е�������ֵ��Ϊ����,ת�����塣
������:n�����ӵ�����������������Ϊn�����˻�����������
�����Dz��в���,���ó���n����������С�ᾡ���ܵ���ȡ�
���ø÷������ֲ�����������ͼ4��ʾ��
3. ���Ӹ��Ǻ�·�滮���⽨ģ
3.1. �˹��Ƴ������ɸ��Ǻ�·
�˹��Ƴ������ɸ��Ǻ�·�滮�㷨��ָ��һ����ʼ���������,����һ���Ĺ��������Ƴ��˶�,���ջ��γ�һ�����Ǻ�·�����Ǻ�·��������ʽ���Ƴ�ֵ�������Լ��˶������������,��ͬ���Ƴ�ֵ���÷����Լ�����,���ɵĸ��Ǻ�·��ͬ��
![]()
Figure 4. Irregular division
ͼ4. ����������
��ͳ�Ļ����˹��Ƴ��ĸ��Ǻ�·���ɷ�������������֮��,������ֵ���������������Ƴ�,Ȼ�������Ƴ����ɺ�·,�㷨�ڱ����Լ�����Ч�ʷ����в�����Ч��,�������ɵ���ʽ�Ƚϵ�һ��
���Ǹ����������ɵ��˹��Ƴ�Ӧ���˹��Ƴ��ķ��ֽ��и��Ǻ�·�滮;������������:
����1:���˻�����ʼ�������,�ƶ�����ֵ��С���ھ�����,������ʼ������Ϊ�Ѹ��ǡ�
����2:���˻���ͣ������ֵ��С��δ���ǵ��ھ������ƶ���
3.2. ���Ӹ��Ǻ�·��Ŀ�꺯��
�������˻��������������,���Ӹ��Ǻ�·��������Ҫȡ���ڸ��Ǻ�·ʵ��ִ�е�Ч�ʺ�Ч��,Ҳ����Ҫ���졢��Ƶ����������Ԥ�����ɶ���������ĸ��Ǽ���,���Ҫ��·��ת��Ĵ����ͽǶ�Ҫ�١��Ե�������ļ��Ӽ��ҪС����·�任���������,���Ӹ��Ǻ�·�滮��Ŀ�꺯����Ҫ�����¼���:
1) ת��Ƕ���ֵ��С
������ת������Ӱ�졣������������������Ҫת��������һ����Ҫ���⡣����ǰ�����ǿ��Ե�֪,���˻��ڷ��й�����,����Ĵ���Խ��,���ĵ�������ʱ�����Դ��Խ��,��·����Խ��Խ�á�
�Դ�,����ʹ�ú�·�����й���Ƕ��ܺ�?z1z1?��������·����һ������,��������ܺͳ�Ϊ����Ƕ���ֵ��
z1=��i=1nqi
����,?qiqi?Ϊ��·�ϵ�i��ת��ĽǶ�,?z1z1?ԽС,Ч��Խ�ߡ�
2) ���ת��Ƕ�
Ҳ�������˻��ں�·�滮�����������ת��Ƕ�,�������ڵ�����?![]()
![]()
����?�Ȧ�?�������˻���ʻ�����е����ת��Ƕȡ�
3) �����ϵ��Ƶ���ֵ��������С��
Ϊ�˷�ӳ��������Ӽ���Ĵ�С,���������һ����ֵ��̬���ӵĻ���,Ҳ�����ڼ����ƽ��Ĺ�����,�����������ֵҲ��ͬ������,���Ǹոո��ǹ����������ֵ����,����,�ڼ��������,�������ֵ������Ӽ���Ĵ�С������,���������Ӽ��ʱ���,��������ֵ�����ӾͶࡣ����,�Ϳ���������Ķ�̬��ֵ�����۶�������Ӽ�����������������������������ֵ����ֵ�����������ۼ��Ӹ��ǵ�Ч�ʡ�
���ǿ�������������������Ƴ�ֵ����ָ�����жϸ��Ǻ�·��Ч��,
![]()
4) ��·�Ŀ�Ԥ����ҪС
���ڼ�������,Ϊʹ���˻���·�߲���Ԥ��,Ӧ�������й�����,����Ԥ����Խ�ߺ�·Խ��Խ��
�Դ�,����ѡ��ʹ���Ŵ��㷨�е����Ӹ���ʱ��T��������·�IJ���Ԥ����
Z5=T?1Z5=T?1
4. �����Ŵ��㷨�ļ��Ӹ��Ǻ�·�滮�㷨
4.1. �������
��õĻ�����뷽ʽ�Ƕ����Ʊ���?[7],Ҳ����01�ַ����������ں�·�滮��,��ʹ�ö����Ʊ���,�ڽ����Ŵ��㷨�ı��졢���桢�ϲ�������ʱ,�����ײ��������еĸ���,������㷨��Ч�ʺͿ����ԡ�Ϊ���ò������µĺ�·λ�ýڵ����,����ʹ�ö�ά��������Ϊ������롣
4.2. ���桢��������µĻ���
1) ��������
����?[8] [9] ��ָͨ���������������һ���ֻ��߶ಿ�ֵĻ���������Ӷ������µĸ��塣
2) ��������
������ͻ��ͽб���,�����һ�����ʵIJ���Ԥ�����Բ���,����������Ⱥ�����Ķ����ԡ�ͨ������������Ӻ�·�滮�������,ʹ��·�Ŀ�ѡ���Ը��ӷḻ������
3) �ϲ�����
�ڱ�������,���һ�ֺϲ�����,Ҳ��������������кϲ������������µĻ�����ͼ5��
![]()
Figure 5. Merge operation
ͼ5. �ϲ�����
4.3. ���Ӹ��Ǻ�·����
�����Ŵ��㷨?[10] �ļ��Ӹ��Ǻ�·�����㷨�IJ���������ʾ:
����1:������1:��ʼ����Ⱥ,��������,��ȷ����Ⱥ�ĸ�������T,���������������������Ƴ�,���˻�����ʼλ��?(x0,y0)(x0,y0)?����,��ʱʱ��?t=0t=0,�ƶ�����ֵ��С���ھ�����,������ʼ������Ϊ�Ѹ��ǡ�
����2:���沽����ǰ�ƽ�?t=t+1t=t+1,�Ƴ��������������ֵ����ij����ֵp,���˻��ӵ�ǰλ���ƶ�����ֵ�����ھ�����?(x,y)(x,y)?��,����?(x,y)(x,y)?����ֵ���㡣���ﵽ���Ӹ�������������ʱ��,����Ⱥ���н���������,��ѡ��һ������,����������������������Ƴ���
����3:�����ɵĸ��Ǻ�·����Ҫ���ʱ��,ֹͣ���㡣
5. ����ʵ��
Ϊ�˶��㷨���в���,����ʹ���ļ����˻���ɶ�һ������ļ����������ȶ�Ŀ��������л���,�����ĸ�������,�����˻��ڸ����������ڻ����Ŵ��㷨�ĺ�·�滮��
��������һ�����˻�,��������Ϊ30*30��������������,����ѡ�õ��͡��������ֵ��͵��˹��Ƴ����ӱ�������Ŵ��㷨�ij�ʼ��Ⱥ���趨����ÿ��ǰ�ƽ�һ��,���е���˹��Ƴ�������0.001,��Ⱥ���µĻ���Ϊ���շ���ʱ����и���,����ΪT,Ҳ����ÿ��ǰ�ƽ�Tʱ��,�������Ӹ����Ŵ��㷨����Ⱥ,������Ⱥ�����ѡ��һ�����Ӹ��µ�ǰ���Ƴ�,�������ɺ�·��
�ں�·���ɵĹ�����,ÿ���һ�����ǾͶԺ�·�����ܲ������в���ͳ��,���ܲ����������˻�ת��Ƕ���ֵ�����������Ƴ���ֵ�������Ƴ����ֵ�������Ƴ�ֵ�ı���ȡ�
��ʼ�Ƴ����õ�����������,�ļ����˻��ij�ʼ�Ƴ���ͼ6��ʾ��
![]()
Figure 6. Initial potential field
ͼ6. ��ʼ�Ƴ�
�ڶ����˻�·���滮ʱ,Ϊ��Ӧ�����������ʵ�Ҫ��,�����������Ҫ�����������˻������������Ա��η���Ϊ��,ʹ���ļ����˻����м��Ӹ�������,ÿ����5*900�����沽��,Ҳ�������˻��ֱ�Ը��Ե����������������μ��Ӹ���֮��,���·���һ��������;��Ϊ�Ŵ����ӵı�������,�����˻����������ڵĸ���·���Ѿ����в�ȷ���ԡ�
�ӷ���������,ת��Ƕ���ֵ�ֲ��Ƚ�ƽ��,�Ƴ���ֵҲ�Ƚ�ƽ��,�����Ƴ����ֵ���Ƴ��������ʼ������ƽ��,���˻������������ܽϺõ�����Ԥ���Խ�С�ĺ�·��
6. ��
����ͨ������˹��Ƴ��������Ƴ��ĸ����Ŀ������������л���,���������Ƴ��Ը������˻����г���·���滮,�ڼ��Ӹ��Ǻ�·��Լ��������,���Ƴ����ӱ���ɶ�Ԫ��������������Ӳ���,���������µ�����,���Ӻ�·�仯�Ķ����ԡ�ͨ��������֤������ת��Ƕ���ֵ���Ƴ���ֵ�������Ƴ����ֵ���Ƴ�����Ƚ��,�������㷨����������Ӹ��Ǻ�·�����ԺͶԿ��Ե��������ͨ���ڼ��ӹ����ж��ڸı�����˻�������,���Ӽ���·���IJ�ȷ����,����Ӧ���Ӹ��ǵ�Ҫ��
����������,ͼ7~10��ʾ��
![]()
Figure 7. Total turning angle
ͼ7. ת��Ƕ���ֵ

Figure 8. Total potential field
ͼ8. �Ƴ���ֵ

Figure 9. Standard deviation
ͼ9. �����Ƴ�ֵ�ı���
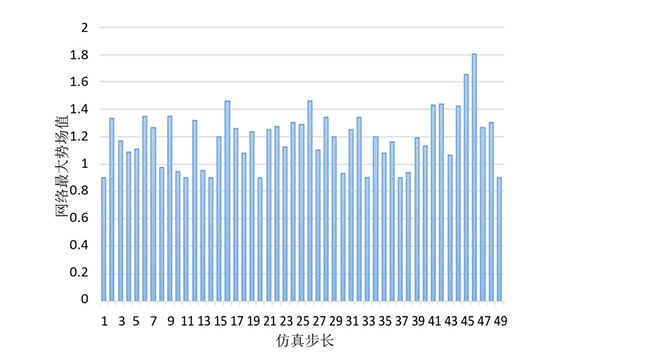
Figure 10. Maximum grid potential
ͼ10. �����Ƴ����ֵ

���ǵķ�������
�����γ�
�˹����ܡ������ݡ�Ƕ��ʽ? ? ? ? ? ? ??? ?? ?
��ѵ�γ�
��ͨ��ѵ��������ѵ? ? ? ? ? ? ? ?? ??? ? ??
��Ŀ��ѯ
����·����ơ��㷨�����ʵ��(ͼ��������Ȼ���Դ���������ʶ��)

