〇、前言
本文将在gazebo仿真环境中使用open_planner完成局部路径规划与避障,open_planner需要输入矢量地图(vector map),可以使用unity map toolbox绘制矢量地图。
一、运行open_planner前的准备工作
1.1、输入以下指令启动包含汽车模型的gazebo仿真环境,《Autoware 1.12学习整理–02–构建点云地图》文章中介绍了仿真环境的配置。
roslaunch vehicle_sim_launcher world_test.launch
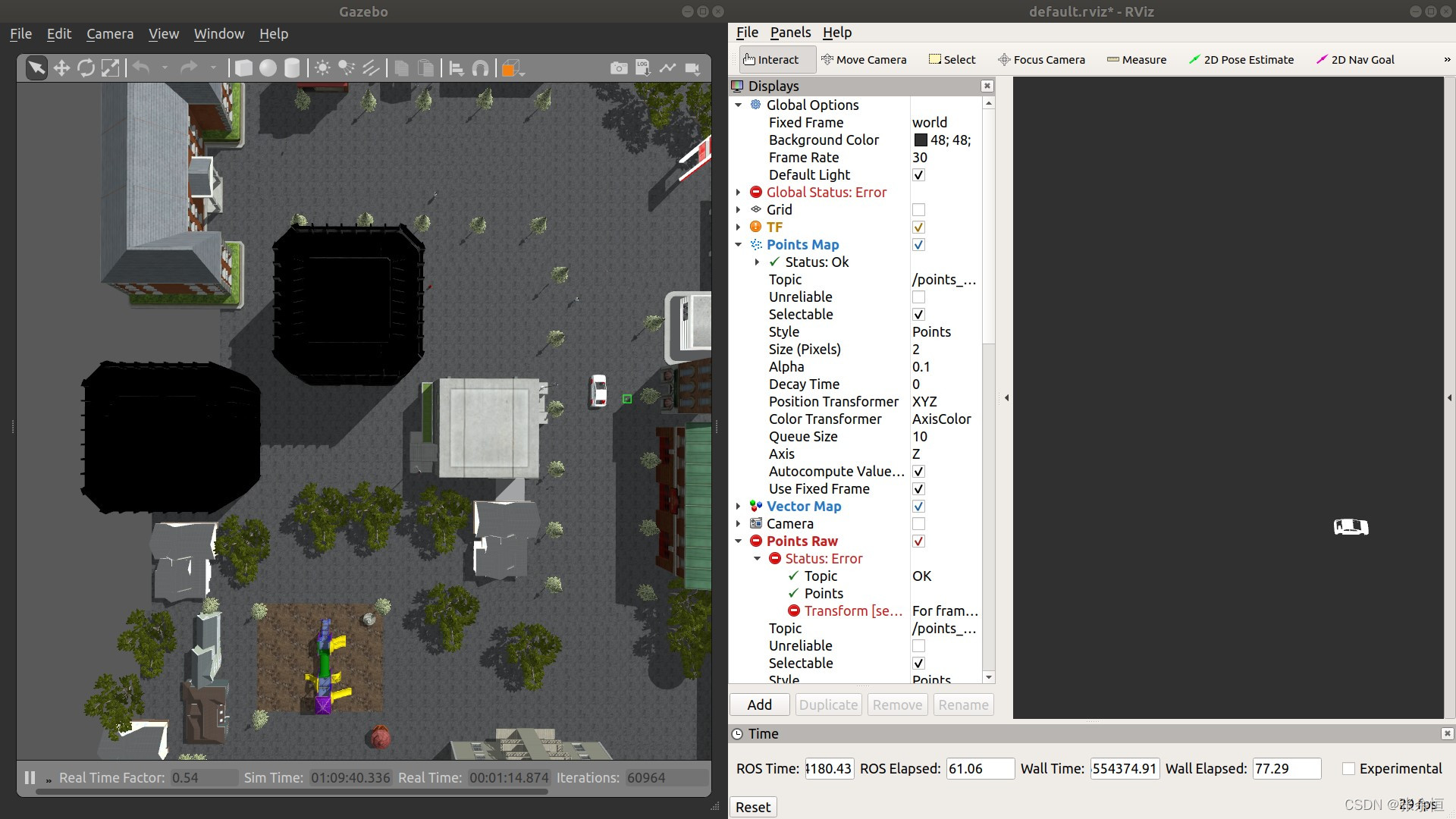
运行命令后会启动gazebo和rviz,在rviz中依次点击file->open config加载配置文件:
autoware.ai/src/autoware/documentation/autoware_quickstart_examples/launch/rosbag_demo/default.rviz
1.2、输入以下指令启动启动autoware
roslaunch runtime_manager runtime_manager.launch
打开autoware界面后,不用在Simulation页面加载bag文件,也不用点击Setup页面的TF按钮和Vehicle Model按钮,因为启动的gazebo完成了base_link到velodyne的坐标系转换,并加载了汽车模型。
1.3、完成从world到map的坐标系转换并加载点云地图
切换到autoware的Map页面下,点击TF右侧的Ref按钮,加载如下路径的launch文件,其中是从/world坐标系转换到/map坐标系的tf变换,最后点击TF按钮,autoware能够记录上一次运行程序时的路径,所以只点击TF按钮即可。
autoware.ai/src/autoware/documentation/autoware_quickstart_examples/launch/tf_local.launch
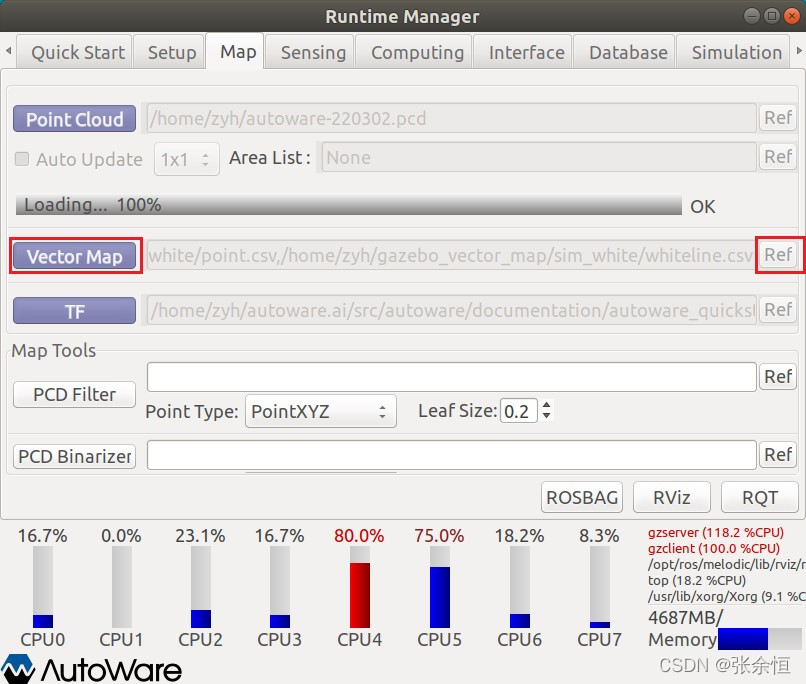
点击Point Cloud右侧的Ref按钮,加载pcd点云地图,并点击Point Cloud按钮,进度条显示OK,则加载完毕。
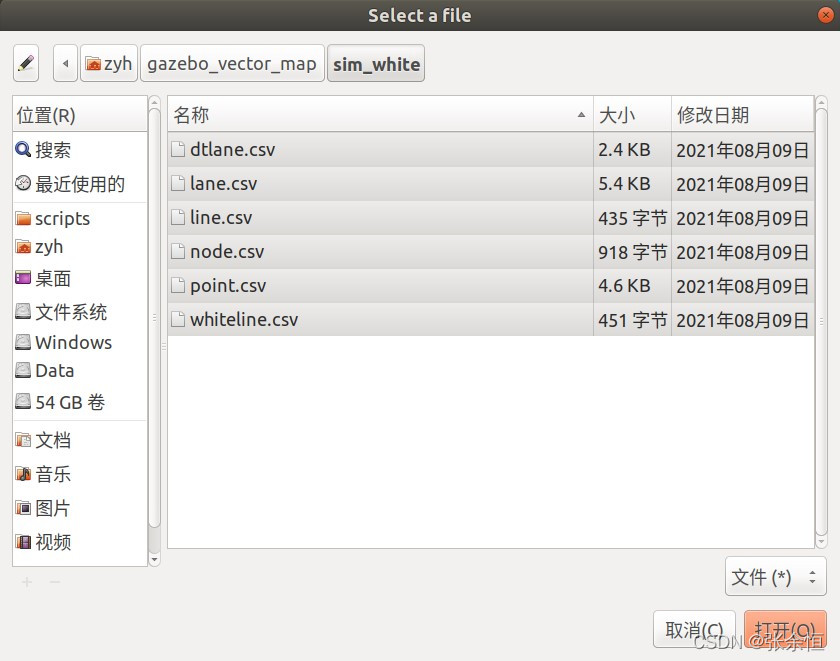
1.4、加载矢量地图
点击Vector Map右侧的Ref按钮,选择绘制的矢量地图文件中的所有文件进行加载,最后Vector Map按钮。
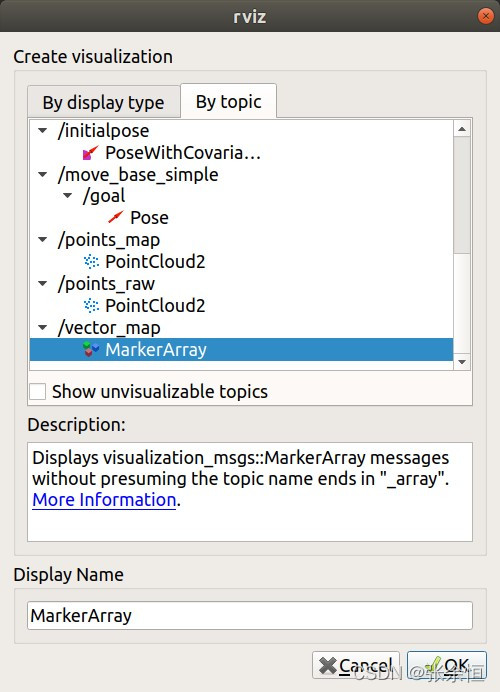
在rviz左下角点击Add按钮,弹出的显示框中点击By topic按钮,找到话题/vector_map的MakerArray并添加,则rviz中出现了矢量地图。

1.5、点云降采样
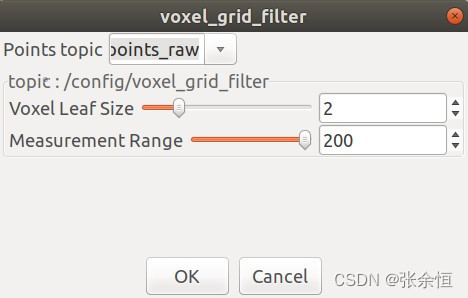
切换到autoware的Sensing页面下,点击Points Downsampler下voxel_grid_filter右侧的app按钮,在弹出的界面中设置点云话题名Points topic为/points_raw,下面两个参数默认即可,最后勾选voxel_grid_filter。voxel_grid_filter滤波原理和参数意义在此篇博客有作说明。
1.6、点云预处理
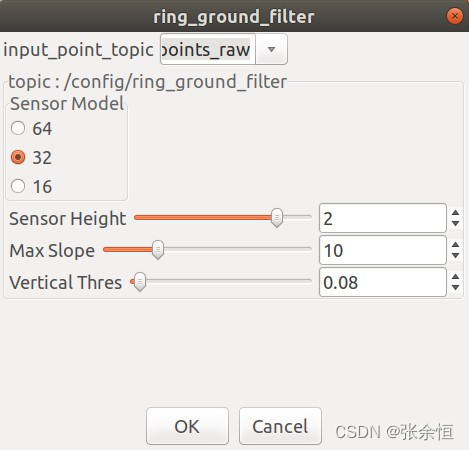
在Sensing页面中,点击Points Preprocessor下ring_ground_filter右侧的app按钮,在弹出的界面中设置点云话题名input_point_topic为/points_raw,Sensor Model选32,参数含义在上篇博客中有作说明。设置完参数后点击OK退出,最后勾选ring_ground_filter。

1.7、完成map到base_link的坐标系转换
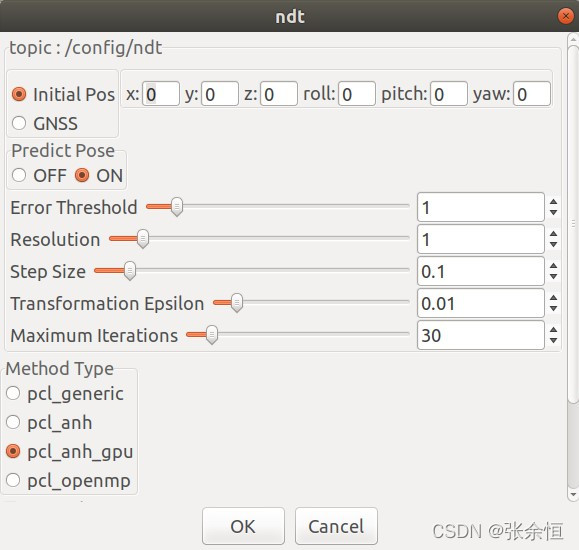
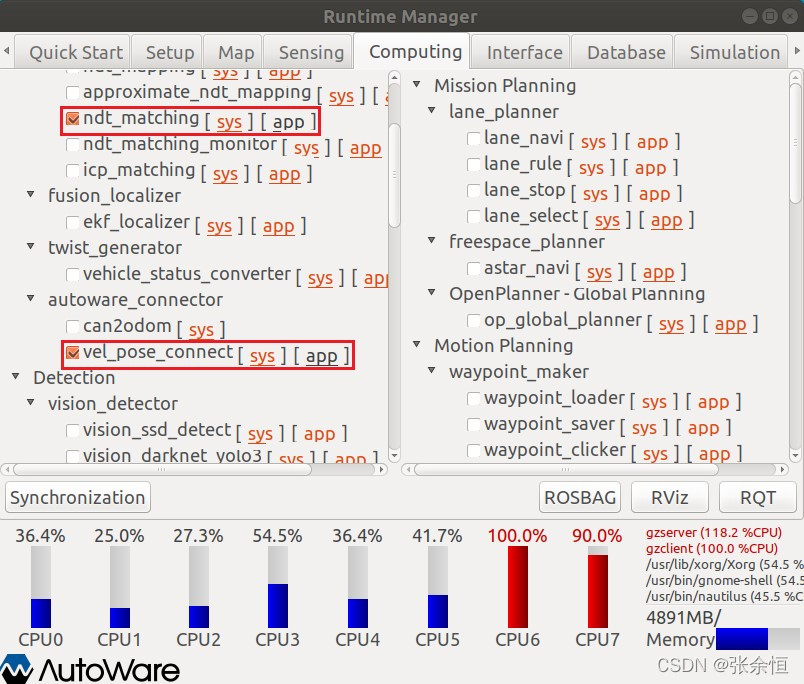
切换到autoware的Computing页面下,点击lidar_localizer下ndt_matching右侧的app按钮,在弹出的页面中topic:/config/ndt选择Initial Pos选项,x,y,z,roll,pitch,yaw的值表示激光数据的初始位姿,如果有GNSS设备可以选择GNSS进行初始定位。Method Type选择pcl_anh_gpu,即使用GPU进行点云匹配计算,然后点击OK,最后勾选ndt_matching,完成ndt定位。
1.8、启动vel_pose_connect
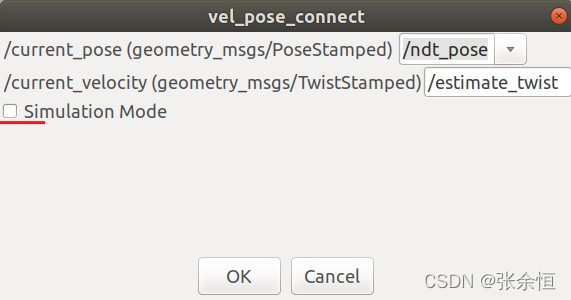
在autoware的Computing页面下,点击autoware_connector下vel_pose_connect右侧的app按钮,在弹出的界面中确定没有勾选Simulation_Mode,退出并勾选vel_pose_connect。
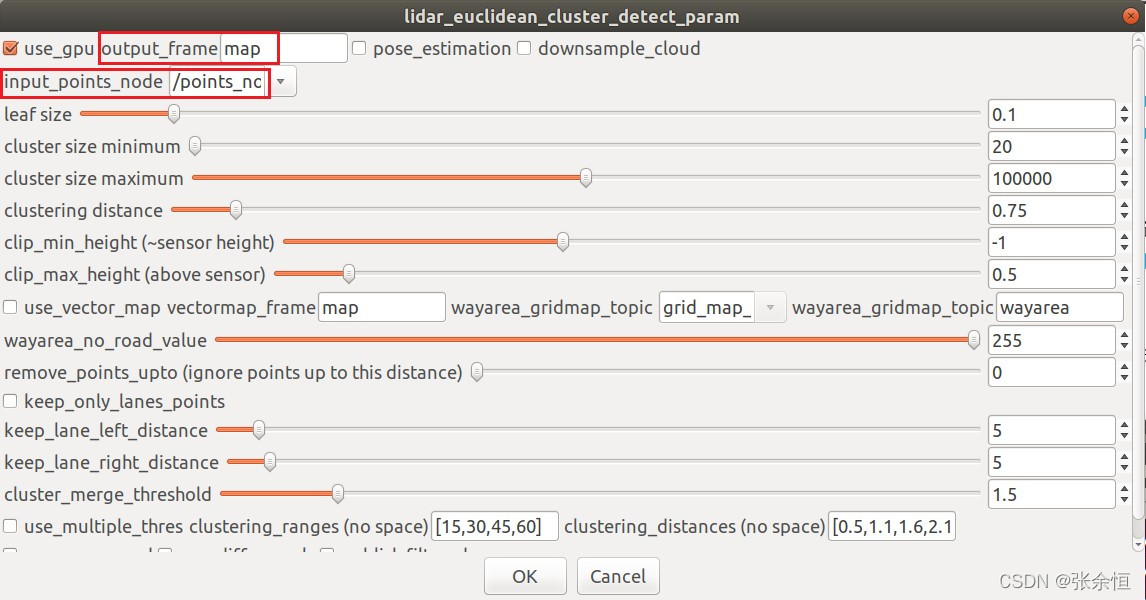
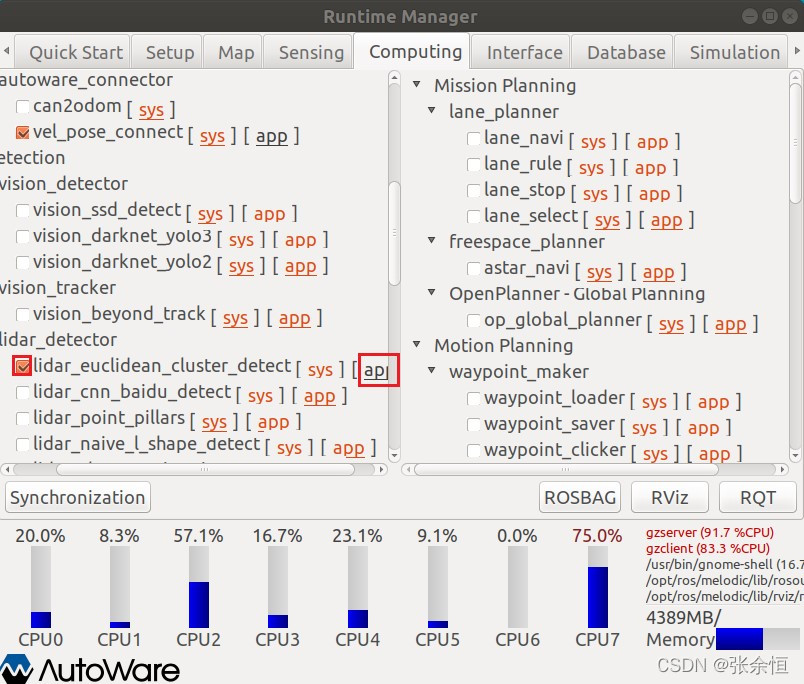
1.9、开启欧几里得聚类
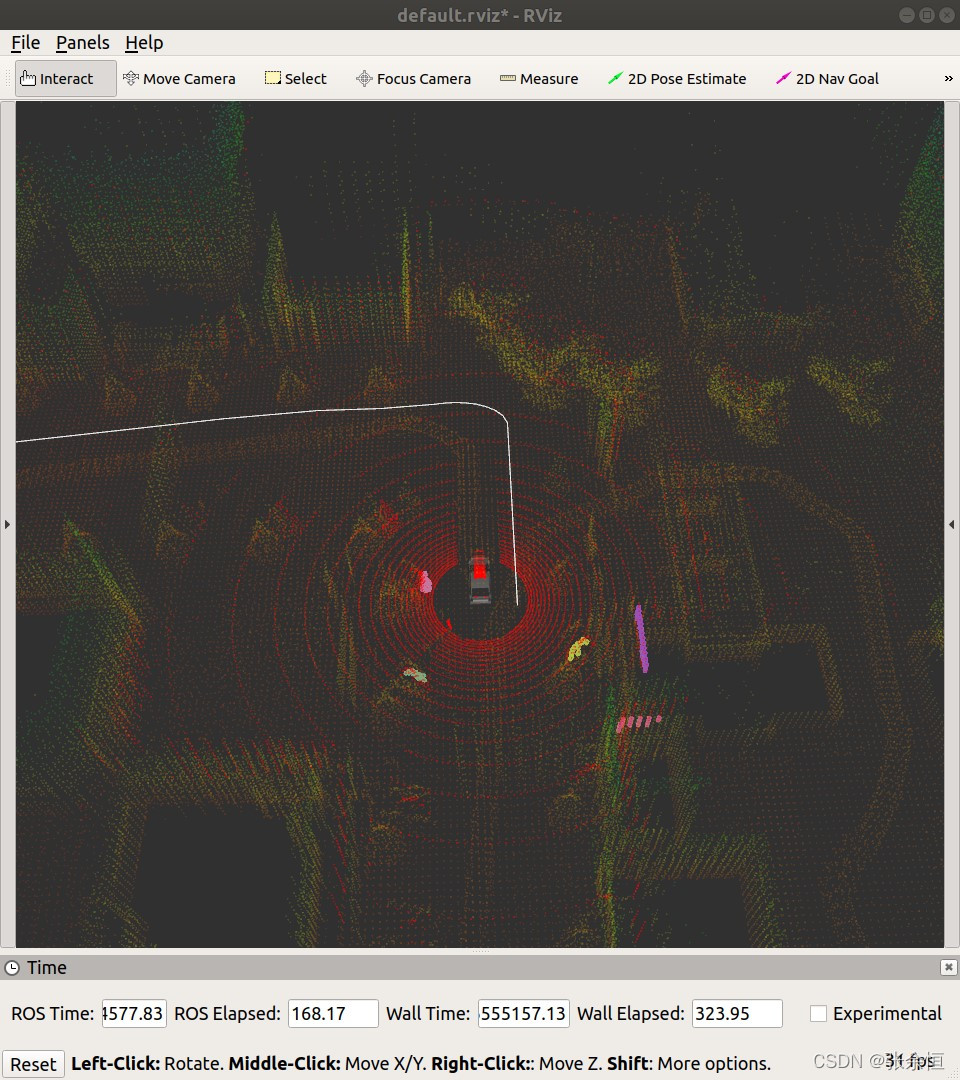
在autoware的Computing页面下,点击lidar_detector下lidar_euclidean_cluster_detect右侧的app按钮,在弹出的界面中,设置output_frame为map,input_points_node为/point_no_ground,clip_min_height和clip_max_height表示检测障碍物的高度范围,然后点击OK退出后勾选lidar_euclidean_cluster_detect,等待几秒钟后rviz中出现障碍物点云簇 /points_cluster。
1.10、跟踪障碍物
多线激光雷达数据从传感器出来后,经过传统的聚类+高精地图object filter,或者learning-based的方法之后,得到一个目标列表,此目标列表含有二维位置信息和角度信息,没有速度信息,同时基于每一帧的检测方法,可能会出现“目标消失”的问题,因此需要滤波器来跟踪这些目标。
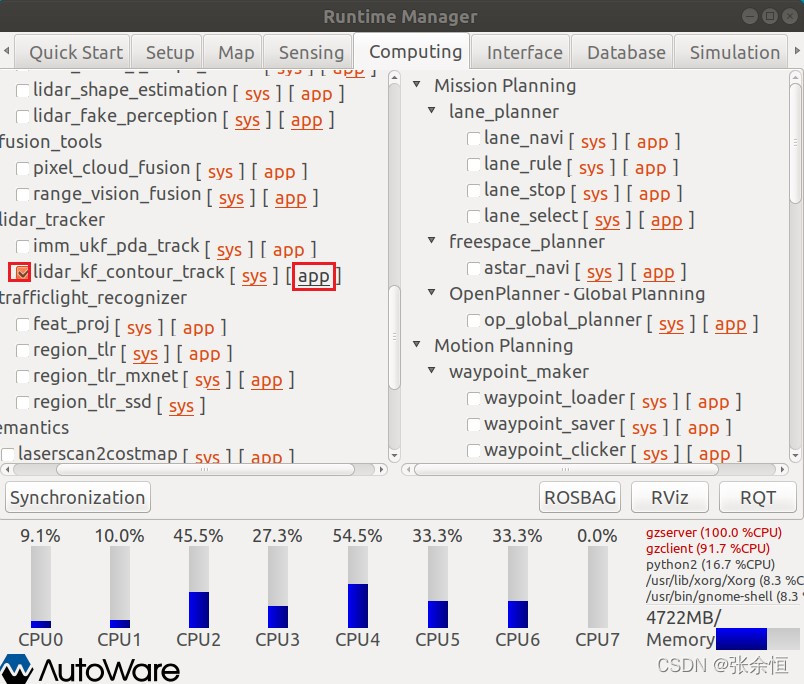
lidar_kf_contour_track用于跟踪障碍物,在autoware1.12版本中需要将其订阅的话题名修改为lidar_euclidean_cluster_detect发布的/detection/lidar_detector/cloud_clusters,然后重新编译一下,可以使用以下指令单独编译此功能包:
AUTOWARE_COMPILE_WITH_CUDA=1 colcon build --cmake-args -DCMAKE_BUILD_TYPE=Release --packages-select lidar_kf_contour_track
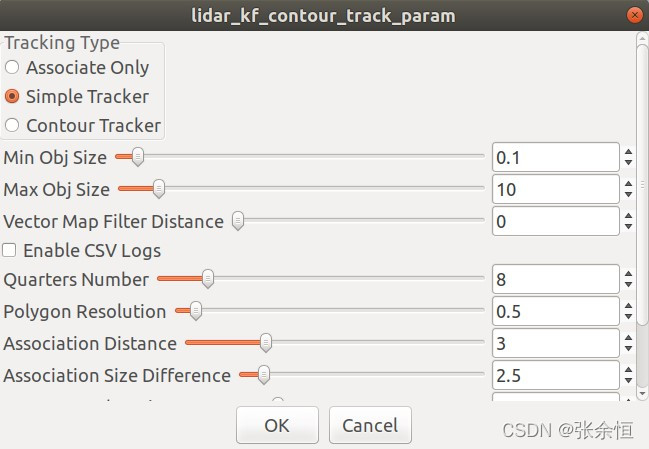
在autoware的Computing页面中,点击lidar_tracker下lidar_kf_contour_track右侧的app按钮,在弹出的界面中,参数Vector Map Filter Distance设置为0,点击OK退出后勾选lidar_kf_contour_track。
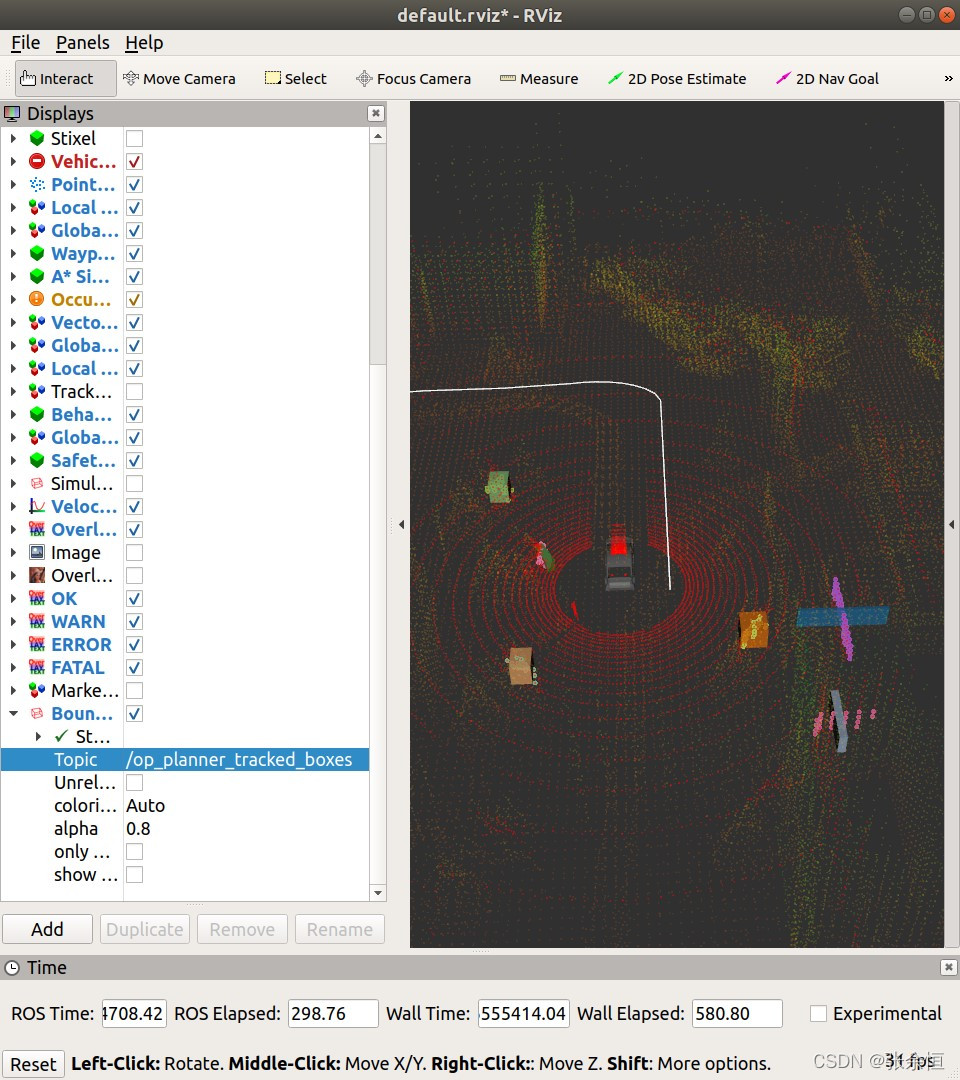
在rviz左下角点击Add按钮,弹出的显示框中点击By display type按钮,找到BoundingBoxArray类型并添加,话题设置为/op_planner_tracked_boxes,此时rviz中出现了彩色矩形块。

二、运行open_planner
2.1、全局路径规划
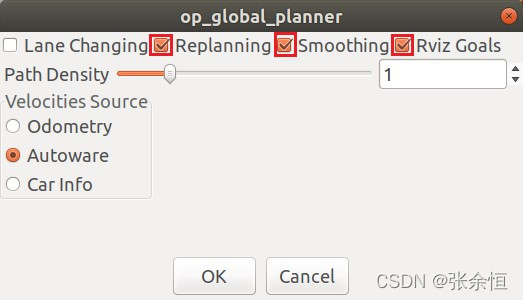
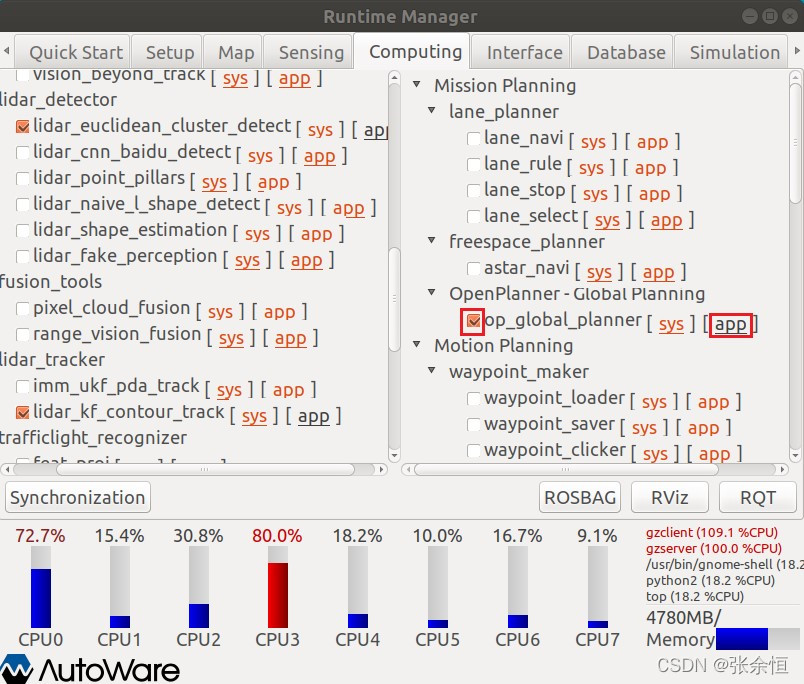
在autoware的Computing页面中,点击OpenPlanner-Global Planning下op_global_planner后面的app按钮,勾选 Replanning、Smooth和Rviz Goals选项, Replanning用于到达目标点后,可以重新规划到下一个目标点,Smooth用于平滑全局路径,Rviz Goals用于在rviz中设置导航目标点,点击OK退出后勾选op_global_planner。
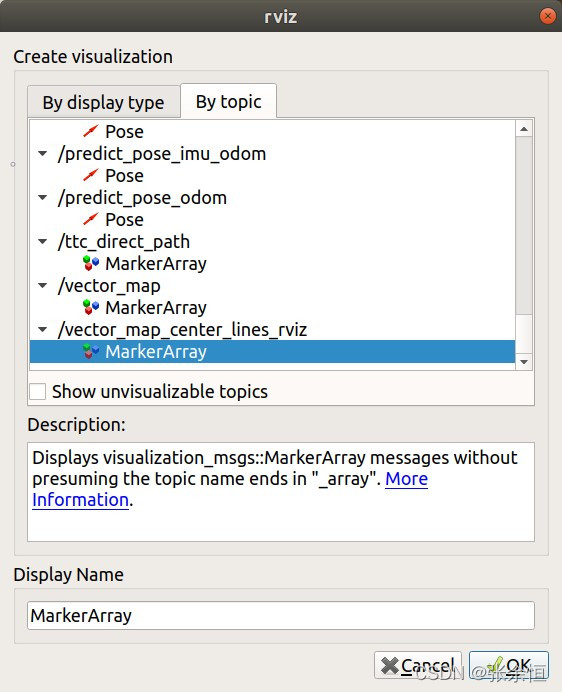
在rviz左下角点击Add按钮,弹出的显示框中点击By topic按钮,找到话题/vector_map_center_lines_rviz的MakerArray并添加,则rviz中汽车正前方出现了一条中线。
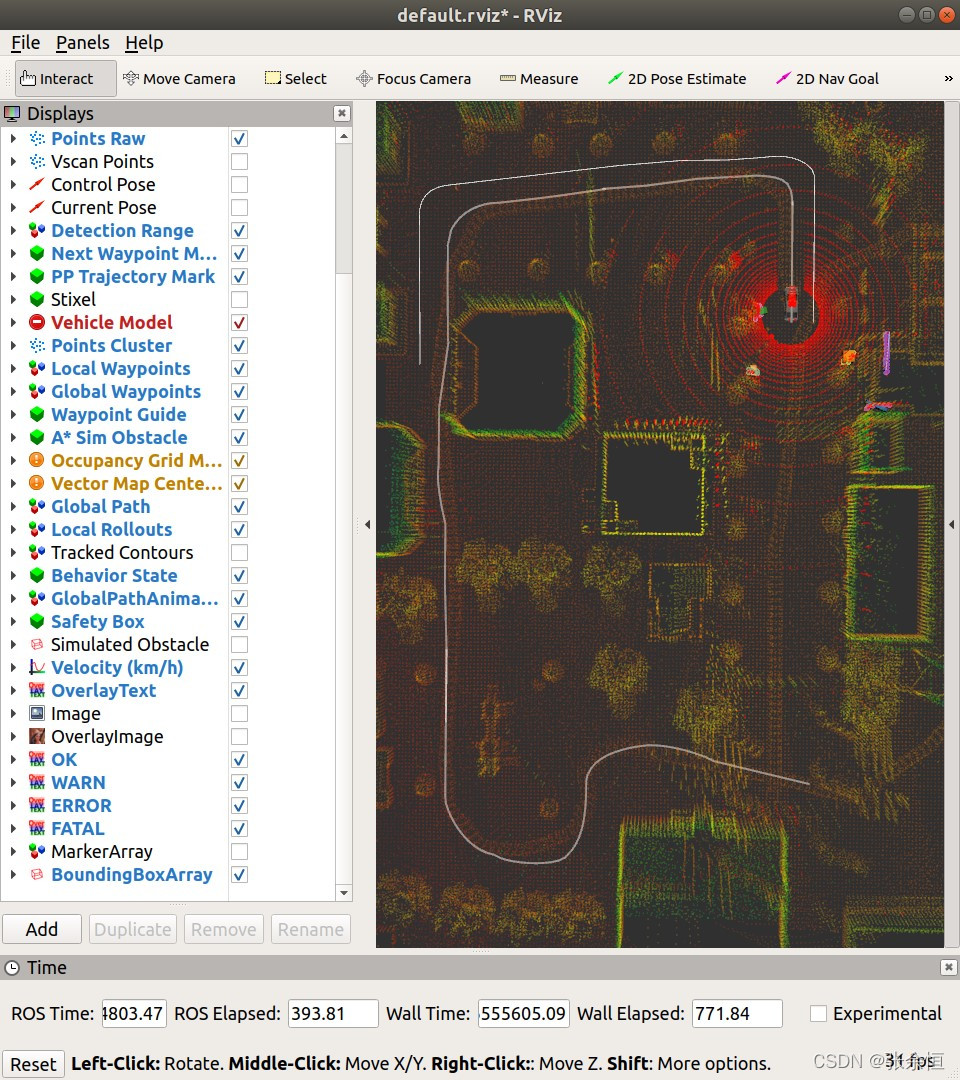
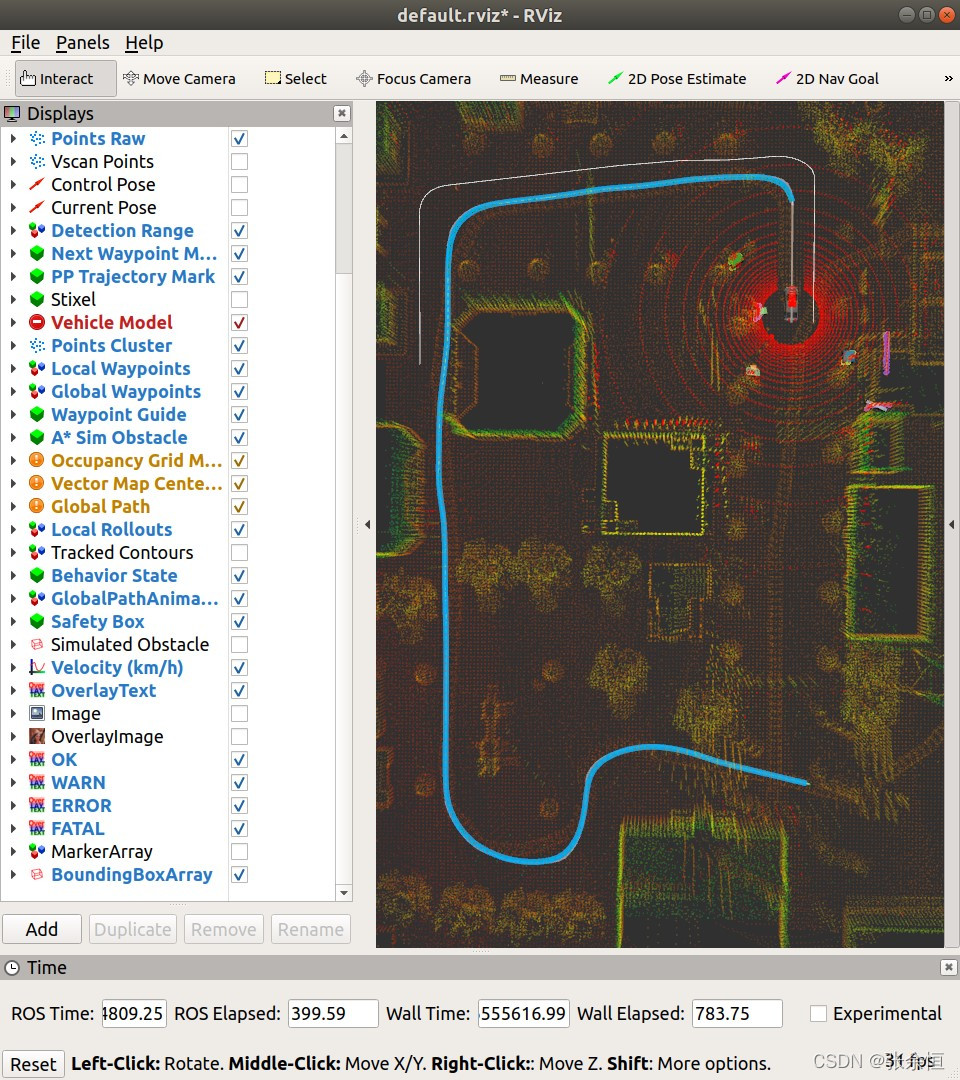
在rviz中点击2D Nav Goal按钮,在出现的中线远离汽车一端上设置导航目标点(目标点尽量靠近中线),然后就可以看到规划出来的全局路径:
2.2、局部路径规划
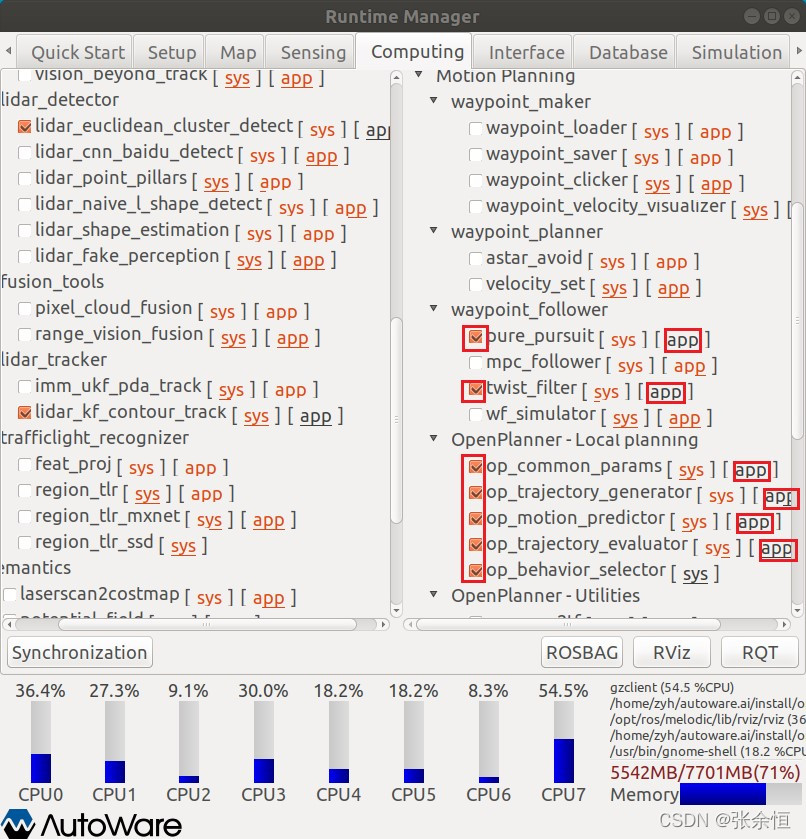
在autoware的Computing页面中,点击OpenPlanner-Local planning下op_common_params右侧的app按钮,弹出如下界面,参数Plan Ditance是局部路径长度,Path Density是局部路径上两个路径点的间距,Horizontal Density是相邻两个局部路径的间距,Rollouts Number是局部路径的条数,Max Velocity是路径上的执行速度,避障时速度减半,Follow DIstance为沿着路径从多远开始检测障碍物,Avoid Distance为沿着路径从多远开始避障,Lateral Safety和Longitudinal Safty是汽车安全框尺寸,设置完参数点击OK退出,勾选op_common_params。

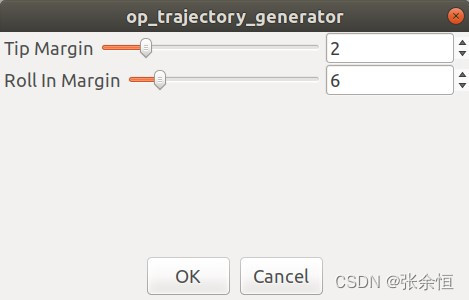
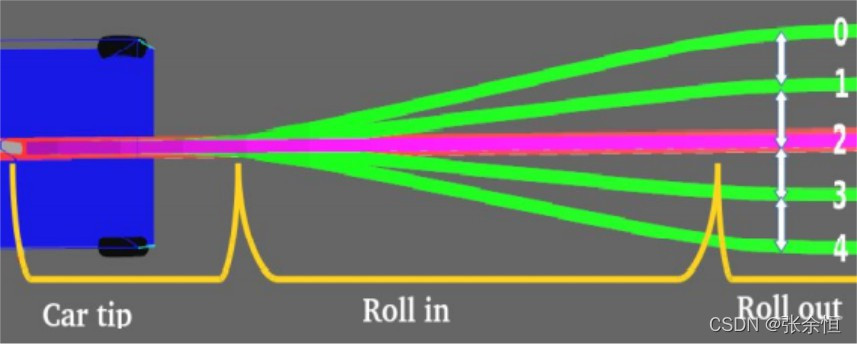
点击OpenPlanner-Local planning下op_trajectory_generator右侧的app按钮,弹出如下界面,参数Tip Margin是车辆中心到横向采样点的距离,其长度决定了在两条轨迹之间切换时转向的平稳性,Roll In Margin是指从Car tip到外部极限的平行横向采样点的距离,这部分的长度和速度成正比,设置完参数点击OK退出,勾选op_trajectory_generator。
接下来点击op_motion_predictor和op_trajectory_evaluator的app按钮查看参数,如下所示:
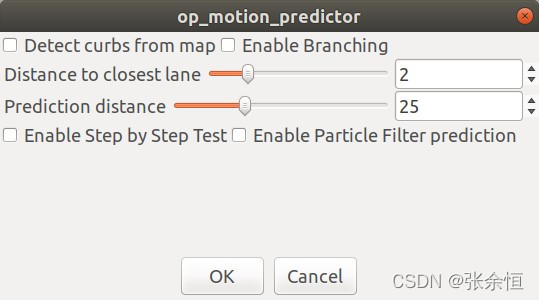
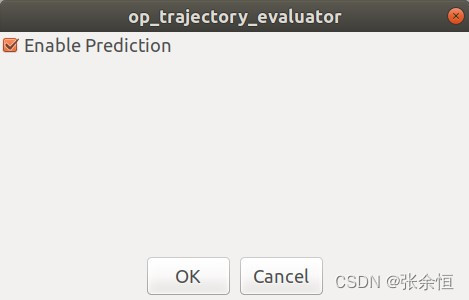
最后勾选op_motion_predictor、op_trajectory_evaluator和op_behavior_selector。
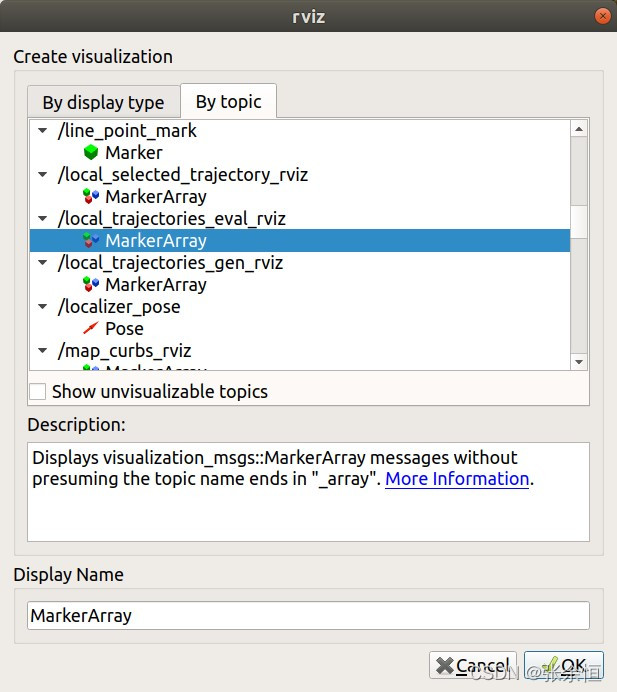
在rviz左下角点击Add按钮,弹出的显示框中点击By topic按钮,找到话题/local_trajectories_eval_rviz的MakerArray并添加,则rviz中出现了多条局部路径。
2.3、路径跟踪
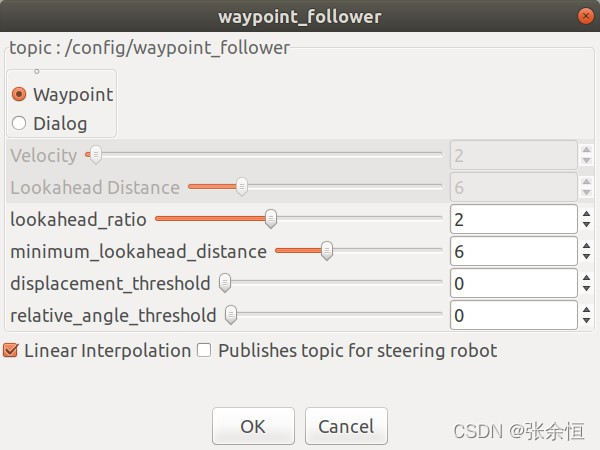
在autoware的Computing页面中,Motion Planning下可以看到waypoint_follower,点击pure_puesuit右侧的app按钮,弹出如下界面,路点跟随的速度选择为Waypoint,点击OK按钮后勾选pure_puesuit。
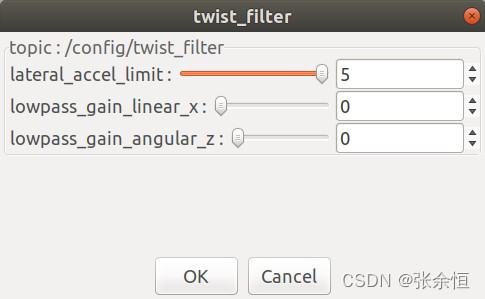
点击twist_filter右侧的app按钮,弹出如下界面,对速度进行滤波,参数默认即可,点击OK按钮后勾选twist_filter。
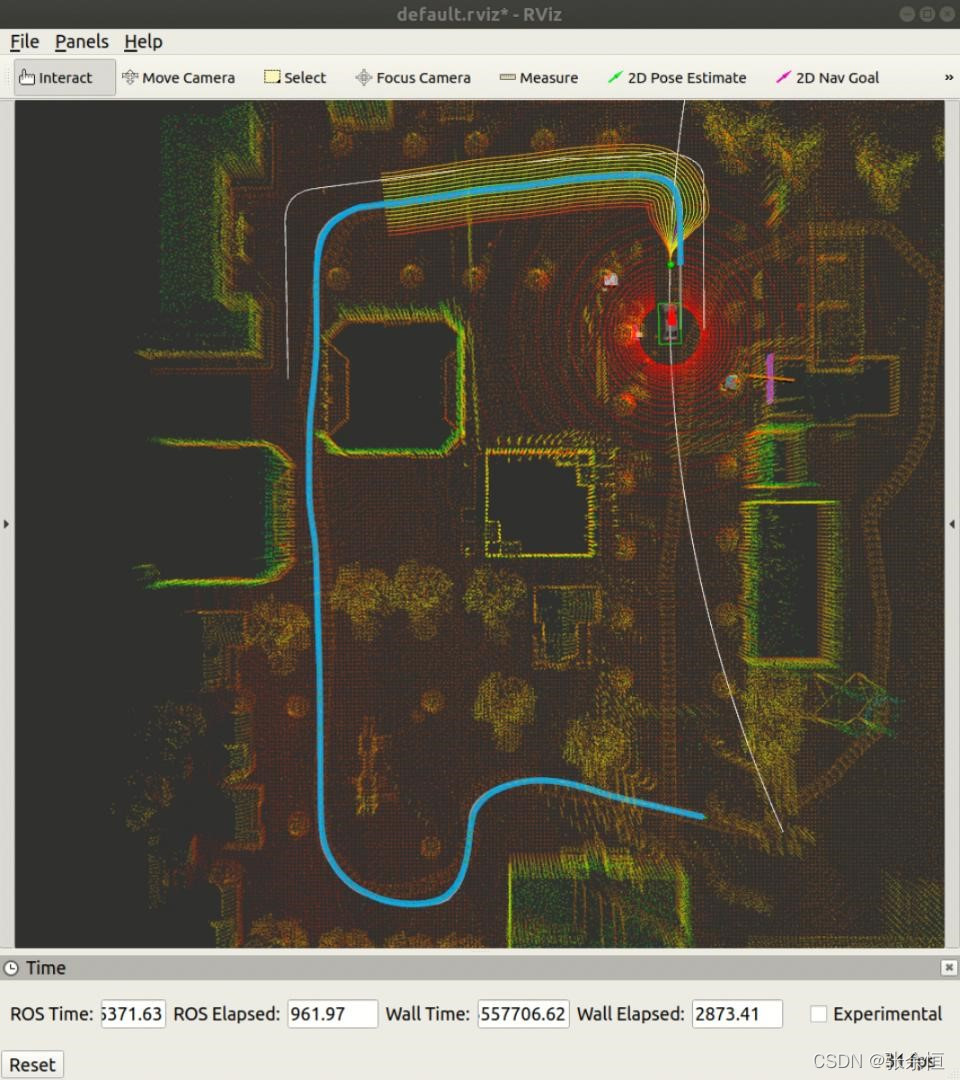
此时汽车开始移动,如下所示:
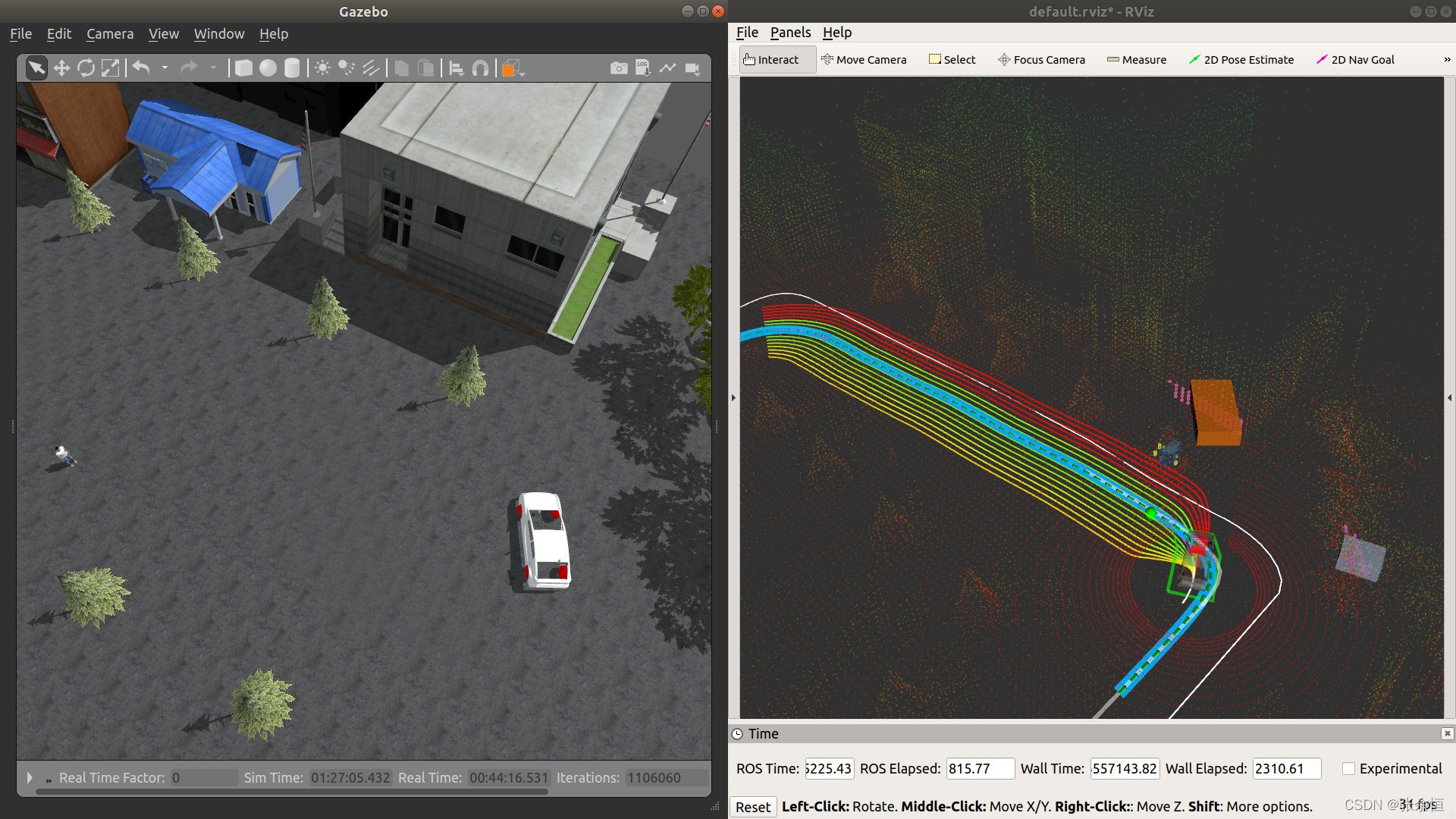
整个运行过程如下:
放入障碍物,汽车避障过程如下:
运行过程中的节点图如下,通过节点图能够看出节点间连接关系和程序运行流程:
文章不妥之处还望指正
参考文章:
https://blog.csdn.net/YP233/article/details/116708489
https://www.cnblogs.com/hgl0417/p/12522266.html
https://blog.csdn.net/weixin_42396991/article/details/117418973