���ĵ�ַ:https://arxiv.org/pdf/1911.09516v2.pdf
Դ������:https://github.com/ruinmessi/ASFF
������������ʾ�ǽ��Ŀ�����г߶ȱ仯����ij��÷�����Ȼ��,��ͬ�����߶�֮��IJ�һ�����ǻ��������������ļ��������Ҫ���ơ����������,���������һ���µ����������Ľ����������ںϲ���,��Ϊ����Ӧ�ռ������ں�(ASFF)����ѧϰ�˿ռ���˳�ͻ��Ϣ�����Ʋ�һ���Եķ���,�Ӷ�����������ij߶Ȳ����ԡ��Խ����������������������еIJ�һ����
������ķ���ʹ�����ܹ�ֱ��ѧϰ�������������϶��������пռ����,�Ӷ�ֻ�������õ���Ϣ������ϡ�����ijһ���������,����������������ȱ����ɲ�����Ϊ��ͬ�ķֱ���,Ȼ�����ѵ�����ҵ�����ںϡ���ÿ���ռ�λ��,��ͬ���������������Ӧ���ں�,Ҳ����˵,һЩ�������ܻᱻ���˵�,��Ϊ�����ڸ�λ��Я��ì�ܵ���Ϣ,��һЩ�������ܻ��Ը��߱����������ռ��������λ��
ASFF���������ŵ�:
(1)�������������ںϵIJ����Dz�ֵ�,��˿��Է�����ڷ�����ѧϰ;
(2) ��������ģ����,�����ھ��������������ṹ�ĵ���̽����;
(3)ʵ�ּ�,���ӵļ�������С��
һ��Strong Baseline
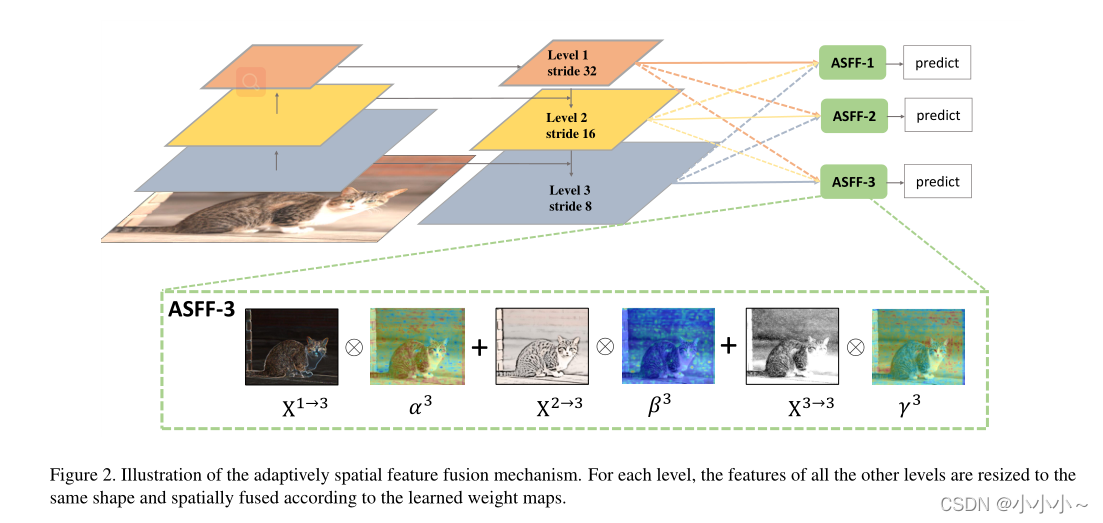
�������Ļ���Ԫ����ͻ����Ķ��������ںϷ�����ͬ,���ĵĹؼ�˼��������Ӧ��ѧϰ���߶�����ͼ�ںϵĿռ�Ȩ�ء����ͼ��ʾ,��������������:��ͬ�ij߶����ź�����Ӧ�ںϡ�
��
x
l
x^l
xl��ʾl���ֱ��ʵ�����(l�� {1,2,3})������l��,����һ��n��(N������l)������
x
n
x^n
xn������
x
l
x^l
xl��ͬ����״������YOLOv3������������������в�ͬ�ķֱ��ʺͲ�ͬ��ͨ����,�����Ӧ������ÿ��������ϲ������²������ԡ������ϲ���,����ʹ��1��1�����㽫������ͨ����ѹ����l��,Ȼ��ͨ����ֵ�ֱ���߷ֱ��ʡ�����1/2���ʵ��²���,ֻ��ʹ��3��3������,����Ϊ2,����ͬʱ��ͨ�����ͷֱ��ʡ�����1/4�ı���,�ڲ���Ϊ2�ľ���֮ǰ������һ������Ϊ2�����ز㡣
����Ӧ�ں���
x
i
j
n
��
l
x^{n��l}_{ij}
xijn��l?��ʾ��n��������l��������ͼ��λ��(i,j)����������������������Ӧ��l���ں�����,������ʾ:

����,
y
i
j
l
y^l_{ij}
yijl?��ʾͨ��֮���������ӳ��yl�ĵ�(i,j)��������
��
i
j
l
��^l_{ij}
��ijl?��
��
i
j
l
��^l_{ij}
��ijl?��
��
i
j
l
��^l_{ij}
��ijl?��������ͬ����l���������ͼ�Ŀռ���Ҫ��Ȩ��,����������Ӧѧϰ��ע��,���ͦö��Ǽı������ܵ�����,��
��
i
j
l
��^l_{ij}
��ijl?+
��
i
j
l
��^l_{ij}
��ijl?+
��
i
j
l
��^l_{ij}
��ijl?=1��
��
i
j
l
��^l_{ij}
��ijl?,
��
i
j
l
��^l_{ij}
��ijl?,
��
i
j
l
��^l_{ij}
��ijl?�� [0,1],������:

����,
��
i
j
l
��^l_{ij}
��ijl?��
��
i
j
l
��^l_{ij}
��ijl?��
��
i
j
l
��^l_{ij}
��ijl?�ֱ���
��
��
i
j
l
��^l_{��_{ij}}
����ij?l?��
��
l
��
i
j
��^l{��_{ij}}
��l��ij?��
��
��
i
j
l
��^l_{��_{ij}}
����ij?l?��Ϊ���Ʋ���,ͨ��ʹ��softmax���������塣ʹ��1��1�������
x
1
��
l
x^{1��l}
x1��l��
x
2
��
l
x^{2��l}
x2��l��
x
3
��
l
x^{3��l}
x3��l����Ȩ�ر���ӳ��
��
��
l
��^l_��
����l?��
��
��
l
��^l_��
����l?��
��
��
l
��^l_��
����l?,��˿���ͨ�����ķ�����ѧϰ��
ͨ�����ַ���,��ÿ���߶�������Ӧ�ؾۺ����м�������������{y1,y2,y3} ����Ŀ����.
����Consistency Property
������ʽ����,ASFF�ݶȼ�������:

ֵ��ע�����,�����ߴ����ͨ��ʹ�ò�ֵ�����ϲ���,ʹ�óػ������²��������,����
?
x
i
j
1
��
l
/
?
x
i
j
1
��
1
?^{1��l}_{x_{ij}}/?^1_{x_{ij}}�� 1
?xij?1��l?/?xij?1?��1.Ϊ�˼��������ô��ʽ(3)����д��:

���ڻ��ڽ����������ļ����(��Ԫ����ͺͼ���)��ʹ�õ����ֳ����ںϲ���,����ʹ��
?
y
i
j
1
/
?
x
i
j
1
=
1
?^{1}_{y_{ij}}/?^1_{x_{ij}}= 1
?yij?1?/?xij?1?=1��
?
x
i
j
1
/
?
x
i
j
1
��
l
=
1
?^1_{x_{ij}}/?^{1��l}_{x_{ij}}= 1
?xij?1?/?xij?1��l?=1

�������һ���ı���ƥ�����,��level1����λ��(i,j)ָ��Ϊ��������IJ���
?
L
/
?
y
i
j
1
?L/?y^1_{ij}
?L/?yij1?�����������������ݶȡ�������Ӧ��λ��������������Ϊ����,
?
L
/
?
y
i
j
2
?L/?y^2_{ij}
?L/?yij2?��
?
L
/
?
y
i
j
3
?L/?y^3_{ij}
?L/?yij3?�����Ը��������ݶȡ����ֲ�һ�����������ݶ�
?
L
/
?
y
i
j
1
?L/?y^1_{ij}
?L/?yij1?������ԭʼ����ӳ��
x
1
x^1
x1��ѵ��Ч�ʡ�
�����������һ�ֵ��ͷ����ǽ������������Ӧλ������Ϊ��������(����
?
L
/
?
y
i
j
2
?L/?y^2_{ij}
?L/?yij2?=
?
L
/
?
y
i
j
3
=
0
?L/?y^3_{ij}=0
?L/?yij3?=0��Ȼ��,����
x
i
j
1
x^1_{ij}
xij1?�еij�ͻ�ѱ�����,��
y
i
j
2
y^2_{ij}
yij2?��
y
i
j
3
y^3_{ij}
yij3?����ɢ�����ᵼ�¸����Ԥ�⡣
����ASFF,������ʾ:

ʽ��
��
i
j
1
,
��
i
j
2
,
��
i
j
3
��
[
0
,
1
]
��^1_{ij},��^2_{ij},��^3_{ij}�� [0, 1]
��ij1?,��ij2?,��ij3?��[0,1]. ����������ϵ��,���
��
i
j
2
��^2_{ij}
��ij2?�� 0��
��
i
j
3
��^3_{ij}
��ij3?�� 0.�����ںϲ�������ͨ�����ķ����㷨ѧϰ,�������õ�����ѵ�����̿��Բ�����Чϵ����ͬʱ,�����Ϣ�ı�����
y
i
j
2
y^2_{ij}
yij2?��
y
i
j
3
y^3_{ij}
yij3?������,�������������
��������ѵ������
��
��
��
����ʾ���������(��������˲�����Ȩ��),
��
=
��
��
l
,
��
��
l
,
��
��
l
�O
l
=
1
,
2
,
3
��={��^l_��,��^l_��,��^l_��| l=1,2,3}
��=����l?,����l?,����l?�Ol=1,2,3�ǿ���ÿ���߶ȵĿռ��ںϵ��ںϲ�������ͨ����С����ʧ����
L
(
��
,
��
L(��,��
L(��,��)�������Ż����������,����
L
L
L��ԭʼYOLOv3Ŀ�꺯������anchor shapeԤ���bounding box�ع��IoU�ع���ʧ����DarkNet53�ķ���Ԥѵ��Ӧ���� mixup,�����µľ����㶼������MSRAȨ�س�ʼ��������Ϊ�˼��ٹ�����ϵķ��ղ��������Ԥ��ķ���,������YOLOv3�еĶ�߶�ѵ���������������˵,��N��ѵ��ͼ���С��������ΪN��3��H��W,����H=W��{320��352��384��416��448��480��512��544��576��608}�����ѡȡ��
����ʵ��:
ASSFԴ��:
class ASFFmobile(nn.Module):
def __init__(self, level, rfb=False, vis=False):
super(ASFFmobile, self).__init__()
# ����ASSF�ij߶ȼ���
self.level = level
# ��ASFF��ͬ�����ͨ������
self.dim = [512, 256, 128]
# ָ���ض������ͨ������
self.inter_dim = self.dim[self.level]
if level==0:
#��ͨ��3*3����Ϊ2�ľ����˽����²������ҽ�ά��ͨ��3*3�ľ�����ͨ�����е���
self.stride_level_1 = add_conv(256, self.inter_dim, 3, 2, leaky=False)
self.stride_level_2 = add_conv(128, self.inter_dim, 3, 2, leaky=False)
self.expand = add_conv(self.inter_dim, 1024, 3, 1, leaky=False)
elif level==1:
self.compress_level_0 = add_conv(512, self.inter_dim, 1, 1, leaky=False)
self.stride_level_2 = add_conv(128, self.inter_dim, 3, 2, leaky=False)
self.expand = add_conv(self.inter_dim, 512, 3, 1, leaky=False)
elif level==2:
self.compress_level_0 = add_conv(512, self.inter_dim, 1, 1, leaky=False)
self.compress_level_1 = add_conv(256, self.inter_dim, 1, 1, leaky=False)
self.expand = add_conv(self.inter_dim, 256, 3, 1,leaky=False)
compress_c = 8 if rfb else 16 #when adding rfb, we use half number of channels to save memory
#1*1�ľ���Ϊ��ͬ�ȼ���Ȩ��
self.weight_level_0 = add_conv(self.inter_dim, compress_c, 1, 1, leaky=False)
self.weight_level_1 = add_conv(self.inter_dim, compress_c, 1, 1, leaky=False)
self.weight_level_2 = add_conv(self.inter_dim, compress_c, 1, 1, leaky=False)
self.weight_levels = nn.Conv2d(compress_c*3, 3, kernel_size=1, stride=1, padding=0)
self.vis= vis
def forward(self, x_level_0, x_level_1, x_level_2):
if self.level==0:
level_0_resized = x_level_0
level_1_resized = self.stride_level_1(x_level_1) #�²���������ͨ��
level_2_downsampled_inter =F.max_pool2d(x_level_2, 3, stride=2, padding=1)
level_2_resized = self.stride_level_2(level_2_downsampled_inter)
elif self.level==1:
level_0_compressed = self.compress_level_0(x_level_0)
level_0_resized =F.interpolate(level_0_compressed, scale_factor=2, mode='nearest')
level_1_resized =x_level_1
level_2_resized =self.stride_level_2(x_level_2)
elif self.level==2:
level_0_compressed = self.compress_level_0(x_level_0)
level_0_resized =F.interpolate(level_0_compressed, scale_factor=4, mode='nearest')
level_1_compressed = self.compress_level_1(x_level_1)
level_1_resized =F.interpolate(level_1_compressed, scale_factor=2, mode='nearest')
level_2_resized =x_level_2
level_0_weight_v = self.weight_level_0(level_0_resized)
level_1_weight_v = self.weight_level_1(level_1_resized)
level_2_weight_v = self.weight_level_2(level_2_resized)
levels_weight_v = torch.cat((level_0_weight_v, level_1_weight_v, level_2_weight_v),1)
levels_weight = self.weight_levels(levels_weight_v)
levels_weight = F.softmax(levels_weight, dim=1)
fused_out_reduced = level_0_resized * levels_weight[:,0:1,:,:]+\
level_1_resized * levels_weight[:,1:2,:,:]+\
level_2_resized * levels_weight[:,2:,:,:]
out = self.expand(fused_out_reduced)
#�Ƿ�Խ�����п��ӻ�
if self.vis:
return out, levels_weight, fused_out_reduced.sum(dim=1)
else:
return out