TensorRT+CUDA加速人体关键点检测
1、 人体关键点检测简介
在影视游戏领域中,动画和角色中必须要有动作如奔跑、打斗、跳跃等,动捕技术出来之前的做法是动画师手工一帧帧修,此方法非常耗时,且非常考验动画师的经验。动捕技术常使用演员表演某些动作,并将这些动作转化为数字模型的动作,目前比较主流的几种动捕技术有红外动捕(标记点动捕):演员穿着紧身衣,衣服上挂满红外反光点,通过红外相机获取反光点的运动轨迹来记录运动数据;惯性动捕:演员身上穿上各种陀螺仪进行记录运动数据;无标记动捕:不使用紧身衣,直接使用rgb相机获取图像,从图像中提取关节点来记录运动数据。上述几种方法各有优缺点,无标记动捕的优势在于演员不需要穿戴各种设备,能随意运动。



使用无标记动捕中的第一个重要的步骤就是人体关键点检测,通过算法分析计算出图像中人体各关键点的位置。目前coco人体关键点数据集将人体关键点表示为17个关节,分别是鼻子、左右眼,左右耳,左右肩,左右肘,左右腕,左右臀,左右膝,左右脚踝。如下图所示


,一块典型的CPU拥有少数几个快速的计算核心,而一个典型的GPU拥有几百到几千个不那么快速的计算核心,如下图,黄色是控制器,绿色是算数逻辑单元,橙色是存储器,CPU和GPU之间通过PCIe总线连接通信。

之所以如此设计,是由于其对应于不同的应用场景,CPU需要很强的通用性来处理各种不同的数据类型,同时又要逻辑判断引入大量的分支跳转和中断处理,所以CPU的更多晶体管用于数据缓存和流程控制。而GPU则是用于处理类型高度统一,相互无依存的大规模数据,所以更多的晶体管用于算数逻辑单元。
3、 TensorRT推理加速
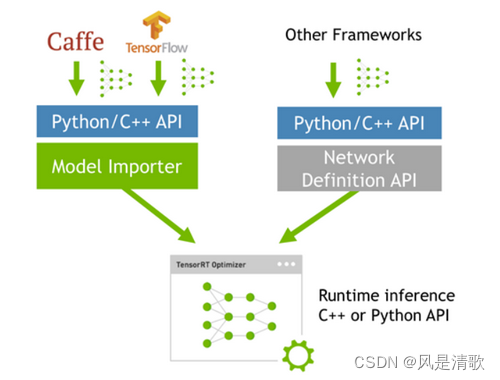
tensorRT是基于python、C++、CUDA编写的一个库,其核心代码为C++和CUDA,用于优化经过训练的的深度学习模型以实现高性能推理。具体流程是将训练好的网络直接扔到tensorRT中,不再依赖深度学习框架(caffe、TensorFlow、pytorch等),如下图所示:
tensorRT的性能优化主要有以下方面:

权重激活与精度校准:大部分深度学习框架在训练神经网络时网络中的张量都是32位浮点型的,一旦网络训练完成,在部署推理的过程中不需要反向传播,完全可以适当降低数据的精度(如降低到INT8,相比于float32内存减少为1/4),从而提高整体推理速度。虽说降低了数据的精度可能会导致推理结果出现偏差,但是只谈读毒性不谈剂量都是耍流氓,从实际测试中看int8和float差距并不大,可以满足大多数使用。
层与张量融合:制约计算速度的CUDA核心计算张量,往往大量的时间也是浪费在CUDA核心的启动和对每一层输入/输出张量的读写操作上面,这造成了内存带宽的瓶颈和GPU资源的浪费。TensorRT通过对层间的横向或纵向合并,使得层的数量大大减少,这样就可以一定程度的减少kernel launches和内存读写。
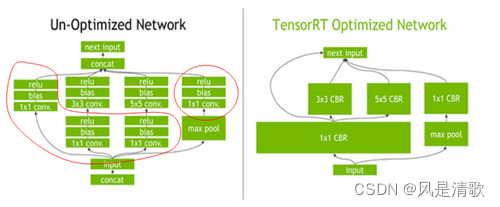
横向合并可以把卷积、偏置和激活层合并成一个CBR结构,只占用一个CUDA核心,纵向合并可以把结构相同但权值不同的层和并成一个更宽的层,也只占用一个CUDA核心,对于多分支合并情况,tensorRT完全可以实现直接到需要的地方,不做专门的concat处理,所以这一层也可以取消掉,合并之后如上图中的右边结构,层次更少、占用的CUDA的核心数也更少,因此整个模型结构会更小更快。
内核自动调整:根据不同的显卡结构、计算单元数量、内核频率等选择不同的优化策略以及计算方式,寻找最合适当前架构的计算方式,这种优化方法也带来了一定的缺点,经过优化的模型和GPU已经产生了绑定,在不同的GPU上优化的模型并不能兼容,但瑕不掩瑜,一般来说在动捕中整个框架都是事先确认好的,而额外增加或者跟换显卡设备也可以快速的从新推理生成模型。
动态张量显存:显存的开辟和释放比较耗时,tensorRT通过一些策略减少显存的开辟和释放次数,增加显存重复利用率从而减少时间。
多流执行:使用CUDA中的stream操作,可以并行处理数据,从而提高显卡的利用率。
通过将训练好的模型进行tensorRT加速优化,并序列化到磁盘中,使用时通过反序列化即可使用优化后的推理引擎加速。使用tensorRT加速的效果如何,通过对比pytorch和tensorRT,均在1080Ti显卡上执行,在pytorch中的计算时间为55毫秒,使用tensorRT加速后的计算时间为10.5毫秒,速度提高了5.23倍。
4、 CUDA编程加速后处理
通过tensorRT优化加速后整个流程并没有结束。首先来看一下关键点回归ground truth的构建问题,主要有coordinate和heatmap两种。Coordinate直接将关键点的坐标作为网络最后的回归目标,使用coordinate之后则不需要再做后续处理,直接将坐标输出给后续流程,但是coordinate回归的是关键点对于图片的offset,而长距离的offset在实际学习过程中很难回归,会造成较大的误差,且在训练过程中提供的监督信息较少,网络收敛较慢。使用heatmap将每一个坐标用一个概率图来表示,对于图片中每个像素都给定一个概率,表示该点属于对应类别关键点的概率,距离关键点越近的概率越趋近1,否则越趋近0,每一个点都设置了监督信息,收敛较快,且对每个像素都提供了预测能有效提高精度。使用heatmap输出的结果并不是单一的坐标,而是一张图像像,如下图所示,整个图像的宽高和输入尺寸一致,17个关键点则有17个维度,需要从这些图像中提取坐标使用CPU计算非常耗时,现在没有了tensorRT这神器帮我们优化了,那么就得靠自己手撸CUDA代码。

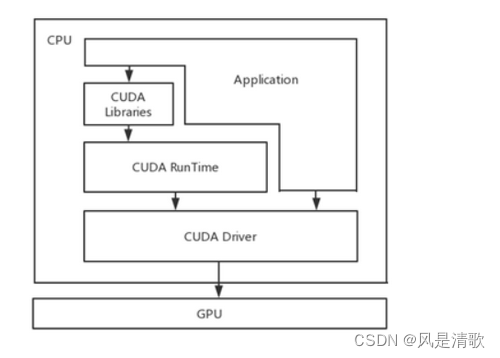
CUDA是NVIDIA公司发布的一种操作GPU计算的硬件和软件架构,下图是CUDA的软件架构,开发应用程序以主机(CPU)为出发点,应用程序可以调用CUDA运行时API、CUDA驱动API以及一些已有的CUDA库。所有这些调用都将利用设备(GPU)的硬件资源。
CUDA编程是一个异构模型,不能单独在GPU中运行,必须在和CPU协同工作,在CUDA中有host(CPU及其内存)和device(GPU及其内存)两个重要概念,前面介绍了CPU和GPU的异同,所以对于较多逻辑判断、分支跳转时使用CPU,需要处理大量简单重复的数据使用GPU,并通过PCIe总线进行通信。以处理关键点heatmap为例,第一步需要将heatmap缩放到输入尺寸,具体流程:(1)、得到tensorRT推理之后的数据,由于tensorRT推理后的数据本身就存在显存中,所以不需要再重新复制,直接可以将数据指针传入到处理函数中;(2)、传入之后根据缩放图像大小开辟等量的数据,在cuda中使用<<<grid,block>>>配置线程数。(3)、每个线程单独处理每个像素值计算出当前位置缩放的值,使程序在逻辑上处于并行状态。
上面步骤中grid表示线程块数,block表示每个线程块内的线程数,所以总大小为grid*block个线程, 之所以说在逻辑上是并行的,是由于GPU和CPU类似,多线程如果没有多核支持,在物理层上无法实现并行。但GPU有很多CUDA核心,GPU硬件的一个核心组件是SM(流式多处理器),SM的核心组件包括CUDA核心、共享内存、寄存器等,SM可以并行的执行数百个线程。所以,上述流程被执行时,grid中的线程块被分配到SM上,SM中以线程束作为基本执行单元,目前所以GPU中线程束大小都是32,所以物理上并行的最大线程数为32个线程。
Heatmap经过缩放,非极大值抑制等一系列处理最终输出得到关键点精确坐标,对比CUDA编程和CPU编程,在CPU(i7 3.2GHz)上处理整个过程消耗25毫秒,在CUDA(1080Ti显卡)中处理消耗2.3毫秒,提升超过了10倍。
注。1
本文仅供学习参考,未经运行,拒绝转载或者用作他用。