计算机图形学――直线的生成算法
前言
在计算机中,绘制一条直线是很麻烦的。我们现在常用的显示器是光栅显示器,该显示器下的图像是又一个又一个的点构成的,所以当我们要从A点到B点画一条直线时,是尽可能将A到B两点间的像素点给画出。
下面是几种常见的生成直线的算法
- 数值微分法
- 中点生成直线算法
- Bresenham算法
数值微分法
假设有两点
P
0
P_0
P0? (
x
0
x_0
x0?,
y
0
y_0
y0?)和
P
1
P_1
P1?(
x
1
x_1
x1?,
y
1
y_1
y1?),我们可以通过当前位置(
x
i
x_i
xi?,
y
i
y_i
yi?)分别加上两个小增量
?
\epsilon
?*dx,
?
\epsilon
?*dy(dx=
x
1
x_1
x1?-
x
0
x_0
x0?,dy=
y
1
y_1
y1?-
y
0
y_0
y0?),则有如下两列:
x
i
+
1
x_{i+1}
xi+1?=
x
i
x_i
xi?+
?
\epsilon
?*dx
y
i
+
1
y_{i+1}
yi+1?=
y
i
y_i
yi?+
?
\epsilon
?*dy
当
?
\epsilon
?足够小时,绘制出的点越多,画出的直线越正规。但设备的精度是有限的,令
?
\epsilon
?=
1
m
a
x
(
d
x
,
d
y
)
{1}\over{max(dx,dy)}
max(dx,dy)1?
即当k<=1时,有:
x
i
+
1
x_{i+1}
xi+1?=x+1
y
i
+
1
y_{i+1}
yi+1?=y+k
当k>=1时,有
x
i
+
1
x_{i+1}
xi+1?=
x
i
x_i
xi?+
1
k
{1}\over{k}
k1?
y
i
+
1
y_{i+1}
yi+1?=
y
i
y_i
yi?+1
那为什么要分k>=1和k<1呢?因为“假设最大位移方向是y,而我们每次选取
x
i
+
1
x_{i+1}
xi+1?=
x
i
x_i
xi?+1,可能会出现y变化过快,导致只绘制出了几个点就画完了,具体的可以动手尝试”
最后,需要注意的是光栅显示上是以一个个像素点为单位的,不可能出现小数点,所以我们要进行四舍五入(四舍五入的方法是+0.5取整)
中点生成直线算法
前面所讲的DDA算法包含浮点数和取整运算,而浮点数的加法比整型加法所需的时间更长,取整运算也不利于硬件的实现,那么怎么进行改进?
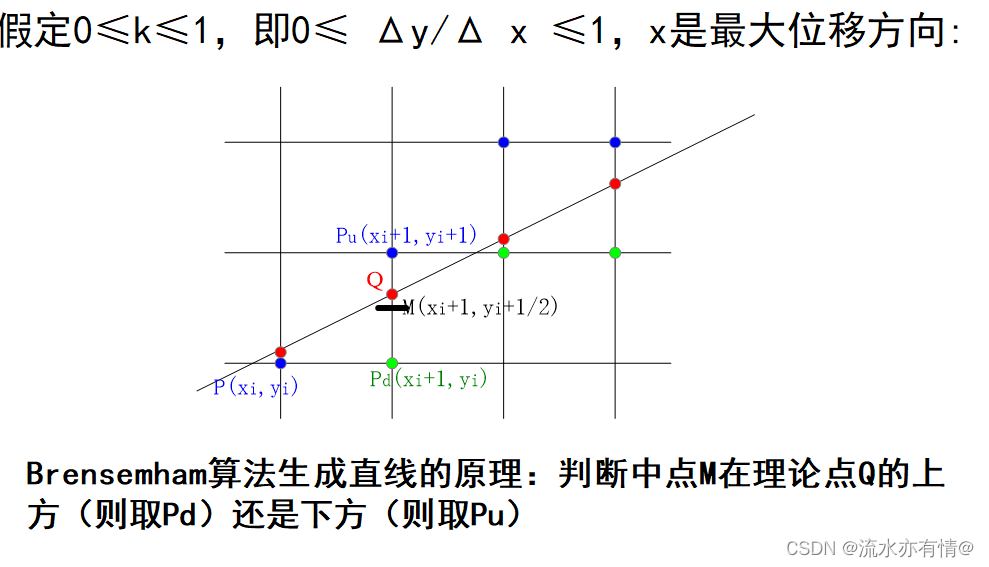
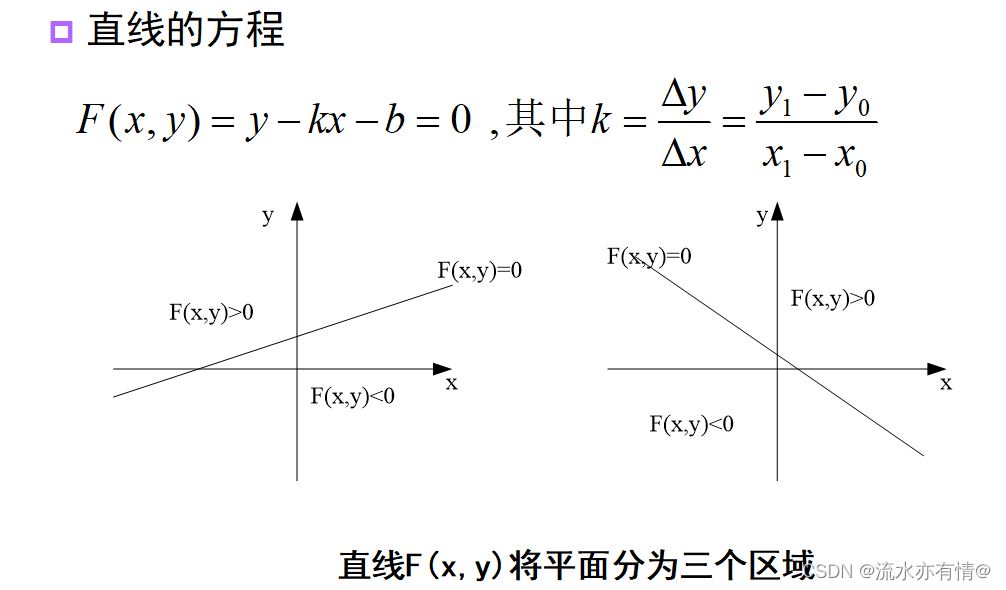
我们可以通过直线方程做文章,上述的直线方程是斜截式。我们中点生成直线算法采用一般式,即F(x,y)=y-kx-b=0,中点生成直线算法的原理是:每次在最大位移方向上走一步,而另一个方向是否走步它取决于实际直线与相邻象素点的距离,这一距离称为误差项
同样给定两点
P
0
P_0
P0? (
x
0
x_0
x0?,
y
0
y_0
y0?)和
P
1
P_1
P1?(
x
1
x_1
x1?,
y
1
y_1
y1?),dx=
x
1
x_1
x1?-
x
0
x_0
x0?,dy=
y
1
y_1
y1?-
y
0
y_0
y0?,k=
d
y
d
x
{dy}\over{dx}
dxdy?
假设k<1,因此每次在x方向上+1,y方向上不变或者+1,如上图,假设当前点是P(
x
i
x_i
xi?,
y
i
y_i
yi?),则下一个点应该在
P
u
P_u
Pu?和
P
d
P_d
Pd?中二选一,当M在Q点下方时,选上面的点;当M在Q点上方时,Q点离下面点近,选下面的点。
要判断M点在P点上方,只需要把M点带入直线方程,判断它的符号即可。
M点坐标为(
x
i
x_i
xi?+1,
y
i
y_i
yi?+0.5),构造判别式
d
i
d_i
di?=F(
x
m
x_m
xm?,
y
m
y_m
ym?)=F(
x
i
x_i
xi?+1,
y
i
y_i
yi?+0.5)=
y
i
y_i
yi?+0.5-k(
x
i
x_i
xi?+1)-b,当
d
i
d_i
di?<0时,M在直线下方,y=y+1;当
d
i
d_i
di?>0时,y=y
接下来进行误差项的递推,
①当di<0时,y=y+1,
d
i
+
1
d_{i+1}
di+1?=F(
x
i
x_i
xi?+2,
y
i
y_i
yi?+1.5)=
y
i
y_i
yi?+1.5-k(
x
i
x_i
xi?+2)-k=
d
i
d_i
di?+1-k
②当di>=0时,y=y,
d
i
+
1
d{i+1}
di+1=F(
x
i
x_i
xi?+2,
y
i
y_i
yi?+0.5)=
y
i
y_i
yi?+0.5-k(
x
i
x_i
xi?+2)-b=
d
i
d_i
di?-k
d0=F(
x
0
x_0
x0?+1,
y
0
y_0
y0?+0.5)=0.5-k
由于我们只需要
d
i
d_i
di?的符号,所以可以用2
d
i
d_i
di?dx来摆脱小数,(整数计算更快),此时d0’=2d0dx=dx-2dy
综上所述:
①输入直线的两端点P0(
X
0
X_0
X0?,
Y
0
Y_0
Y0?),P1(
X
1
X_1
X1?,
Y
1
Y_1
Y1?)。
②计算初始值dx和dy,并计算d0=dx-2dy
③绘制点(x,y),判断d的符号,如果d<0,(x,y)更新为(x+1,y+1),d更新为d+2dx+2dy;否则(x,y)更新为(x+1,y),d更新为d-2dy
④直线若没有画完,重复步骤③
Bresenham算法
虽然中点Bresenham算法的效率很高,但我们有更直观的改进。我们之前取得是中点,那为什么我们不能把各个像素点构造成网格线?直接看它和网格线下面一点交点距离d大小?若大于0.5,取上面点,反之则取下面点。
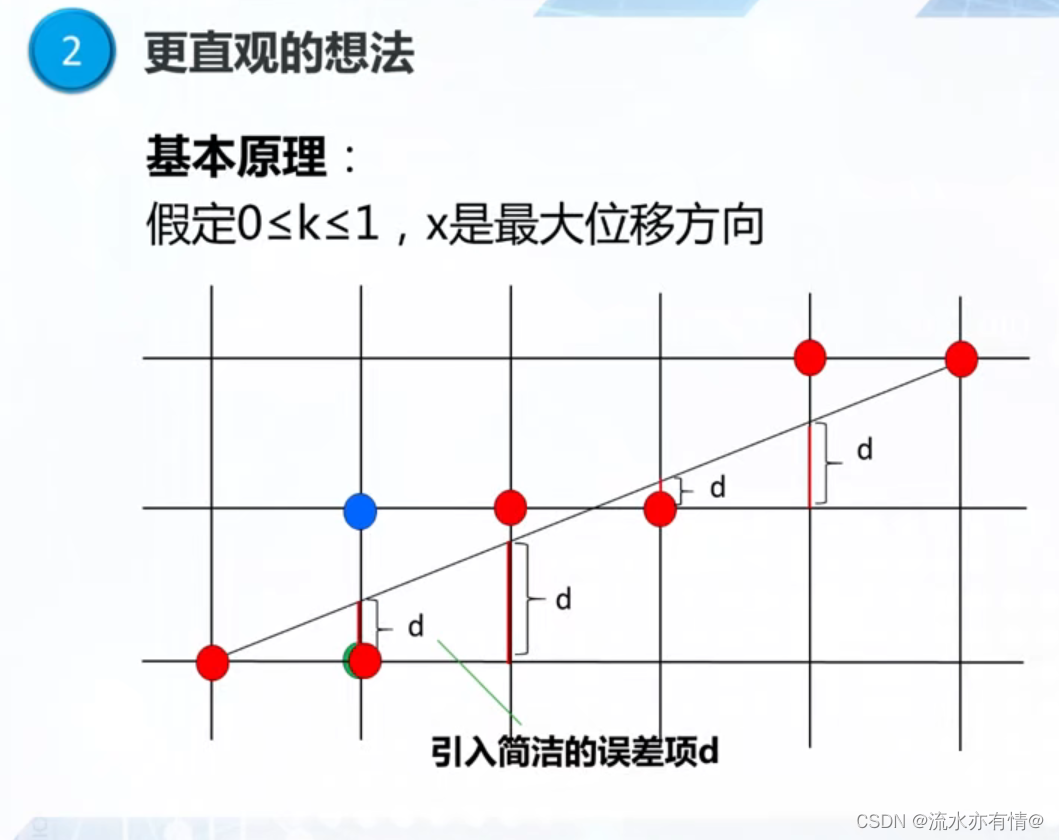
我们仍然假设k<1,则此时有
x
i
+
1
x_{i+1}
xi+1?=
x
i
x_i
xi?+1
y
i
+
1
y_{i+1}
yi+1?=
y
i
y_i
yi? 当d<=0.5时
y
i
+
1
y_{i+1}
yi+1?=
y
i
y_i
yi?+1 当d>0.5时
相比于中点的Bresenham,d表示更为简洁
故这时候算法的思路是
①d0=0
②
d
i
+
1
d_{i+1}
di+1?=
d
i
d_i
di?+k
③若d>=0.5,d=d-1(注意为什么是0.5而不是1,比如它y+1之后d任大于0.5小于1,下一步又要加一实际上下一步是不用加一的)
直线没绘制完前,重复2,3
这里算法的基本思路就结束了,但前面中点的Bresenham算法只用看符号,而这里d还要与0.5进行比较,故将d=d-0.5
故这时候算法的思路是
①do=-0.5
②
d
i
+
1
d_{i+1}
di+1?=
d
i
d_i
di?+k
③d>=0,d=d-1
但此时的算法仍然有浮点数k,我们按照先前的方法,令d=2didx
故这时候的算法的思路是
①d0=-dx
②
d
i
+
1
d_{i+1}
di+1?=di+2dy
③d>=0,d=d-2dx
综上所述:Bresenham算法的最佳改进为
①输入直线的两端点P0(
X
0
X_0
X0?,
Y
0
Y_0
Y0?),P1(
X
1
X_1
X1?,
Y
1
Y_1
Y1?)。
②计算初始值dx和dy,并计算d=-dx
③绘制点(x,y)
④d更新为d+2dy,判断d的符号,如果d>0,(x,y)更新为(x+1,y+1),同时将d更新为d-2dx;否则(x,y)更新为(x+1,y)
⑤直线若没有画完,重复步骤③④