参考 6.3.3节 Boyd 和 Vandenberghe 《凸优化》
CVX示例库
正则逼近
正则逼近问题可以写成:
?
minimize?
∥
A
x
?
b
∥
+
γ
?
(
x
)
,
γ
>
0
\text{minimize}~ \|Ax-b\|+\gamma \phi(x), \gamma>0
minimize?∥Ax?b∥+γ?(x),γ>0
正则逼近问题最小化范数
∥
A
x
?
b
∥
\|Ax-b\|
∥Ax?b∥和
?
(
x
)
\phi(x)
?(x)的加权和,其中
∥
A
x
?
b
∥
\|Ax-b\|
∥Ax?b∥测量残差的大小,
?
(
x
)
\phi(x)
?(x)是正则项。如果
?
(
x
)
\phi(x)
?(x)是凸函数,则正则逼近问题是凸优化问题。
?两种常见的 ? ( x ) \phi(x) ?(x)是 ∥ x ∥ \|x\| ∥x∥(测量 x x x的大小)和 ∥ D x ∥ \|Dx\| ∥Dx∥(测量x的平滑度),其中? D D D代表差分或二阶差分算子。
信号重建/降噪?
一个特殊的正则逼近问题是信号重建/降噪。信号重建/降噪的目的是从采样的含噪观测信号
y
=
x
+
v
y=x+v
y=x+v中估计原始信号
x
x
x。我们假设原始信号
x
x
x是缓慢变化的,而噪声信号
v
v
v是快速时变的,则信号重建/降噪问题可以写成:
?
minimize?
∥
A
x
?
b
∥
2
+
γ
∥
D
x
∥
,
γ
>
0
\text{minimize}~ \|Ax-b\|_2+\gamma \|Dx\|, \gamma>0
minimize?∥Ax?b∥2?+γ∥Dx∥,γ>0
?正则项
∥
D
x
∥
\|Dx\|
∥Dx∥常用的两种范数?是
l
2
l_2
l2?范数(二次平滑)和
l
1
l_1
l1?范数(全变差(Total Variation, TV)重建/平滑)。
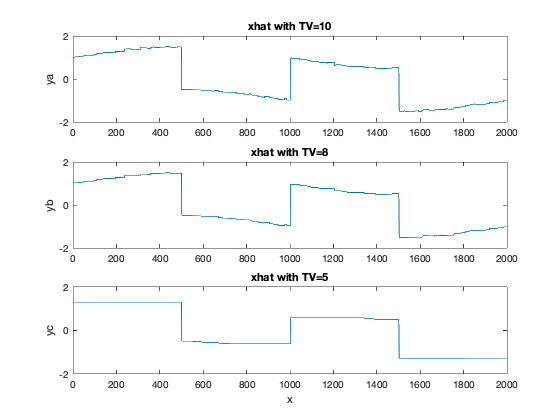
示例(比较了两种范数的区别)
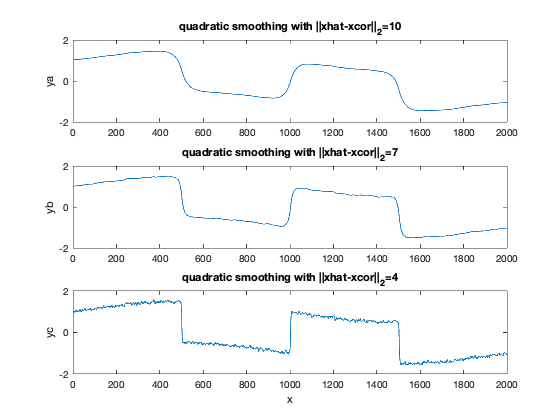
假设原始信号 x x x绝大多处是平滑的,但是存在一些跳变;噪声是快速变化的。如果我们采用二次平滑( l 2 l_2 l2?范数)的方法降噪,则无法保留原始信号的跳变;如果我们采用全变差重建( l 1 l_1 l1?范数)的方法降噪,可以在降噪的同时保留原始信号的跳变。代码如下:
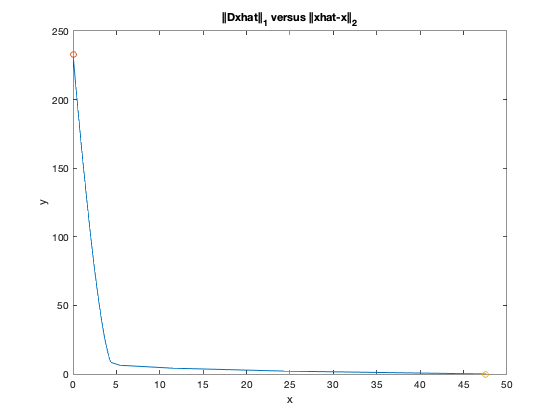
% Figure 2 shows the tradeoff curve obtained when varying lambda
% and figure 3 shows three reconstructed signals with different
% total variation.
%
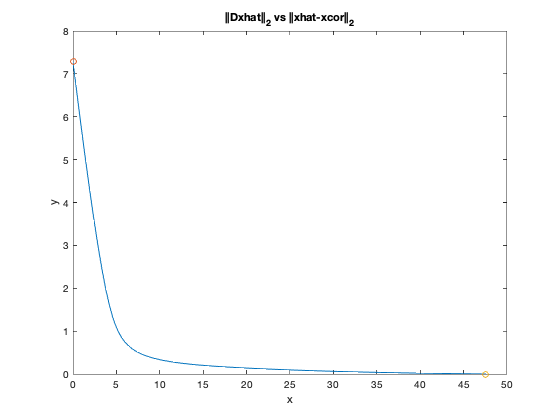
% Figure 4 is a tradeoff curve for quadratic smoothing, while figure 5
% shows three reconstructed signals with quadratic smoothing.
% Note how TV reconstruction does a better job of preserving the
% sharp transitions in the signal while removing the noise.
n = 2000; % 信号长度
t = (0:n)';
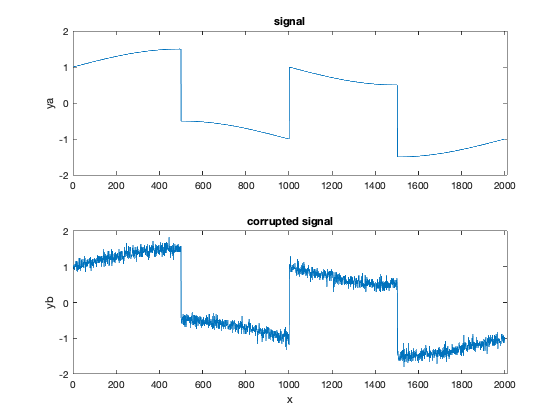
% 构建并画出原始信号
figure(1)
subplot(211)
temp = ones(ceil((n+1)/4),1);
exact= [temp; -temp; temp; -temp];
exact = exact(1:n+1) + 0.5*sin((2*pi/n)*t);
plot(t,exact,'-');
axis([0 n+10 -2 2]);
ylabel('ya');
title('signal');
exact_variation = sum(abs(exact(2:(n+1)) - exact(1:n)))
% 构建并画出含噪的观测信号
subplot(212)
noise = 0.1*randn(size(t));
corrupt = exact+noise;
plot(t,corrupt,'-');
axis([0 n+10 -2 2]);
noisy_variation = sum(abs(corrupt(2:(n+1)) - corrupt(1:n)))
ylabel('yb');
xlabel('x');
title('corrupted signal');
%print -deps tv_exact_corrupt.eps % figure 6.11, page 315
% 计算并画出全变差(total variation) vs ||x-xcorr||_2 的折中曲线
% figure 6.13 page 316
fprintf('computing 100 points on tradeoff curve ... \n');
nopts = 100;
TVs = linspace(0.01,.9*noisy_variation,nopts);
obj1 = []; obj2 = [];
for i=1:nopts
fprintf('tradeoff point %d\n',i);
cvx_begin quiet
variable xrec(n+1)
minimize(norm(xrec-corrupt))
subject to
norm(xrec(2:(n+1))-xrec(1:n),1) <= TVs(i);
cvx_end
obj1 = [obj1, TVs(i)];
obj2 = [obj2, norm(full(xrec-corrupt))];
end;
obj1 = [0 obj1 noisy_variation];
obj2 = [norm(corrupt) obj2 0];
figure(2)
plot(obj2,obj1,'-'); hold on
plot(0,noisy_variation,'o');
plot(norm(corrupt),0,'o'); hold off
xlabel('x');
ylabel('y');
title('||Dxhat||_1 versus ||xhat-x||_2');
%print -deps tv_tradeoff.eps % figure 6.13, page 316
figure(3)
subplot(311)
% 求解全变差问题
cvx_begin quiet
variable xrec(n+1)
minimize(norm(xrec-corrupt))
subject to
norm(xrec(2:(n+1))-xrec(1:n),1) <= 10;
cvx_end
plot(t,xrec','-');
axis([0 n -2 2]);
ylabel('ya');
title('xhat with TV=10');
subplot(312)
cvx_begin quiet
variable xrec(n+1)
minimize(norm(xrec-corrupt))
subject to
norm(xrec(2:(n+1))-xrec(1:n),1) <= 8;
cvx_end
plot(t,xrec','-');
axis([0 n -2 2]);
ylabel('yb');
title('xhat with TV=8');
subplot(313)
cvx_begin quiet
variable xrec(n+1)
minimize(norm(xrec-corrupt))
subject to
norm(xrec(2:(n+1))-xrec(1:n),1) <= 5;
cvx_end
plot(t,xrec','-');
axis([0 n -2 2]);
xlabel('x');
ylabel('yc');
title('xhat with TV=5');
%print -deps tv_rec_10_8_5.eps % figure 6.14, page 317
% 二次平滑, figure 6.12, page 316
% 这种情况下,没有必要使用CVX,因为存在解析解。
A = sparse(n,n+1); % n*(n+1)的零矩阵的稀疏形式
A(:,1:n) = -speye(n,n); A(:,2:n+1) = A(:,2:n+1)+speye(n,n);
% 二次平滑的折中曲线
nopts = 100;
lambdas = logspace(-10,10,nopts);
obj1 = []; obj2 = [];
for i=1:nopts
lambda = lambdas(i);
x = (A'*A+lambda*speye(n+1,n+1)) \ (lambda*corrupt);
obj1 = [obj1, norm(full(A*x))];
obj2 = [obj2, norm(full(x-corrupt))];
end;
figure(4)
plot(obj2,obj1,'-'); hold on
plot(0,norm(A*corrupt),'o');
plot(norm(corrupt),0,'o'); hold off
xlabel('x');
ylabel('y');
title('||Dxhat||_2 vs ||xhat-xcor||_2');
%print -deps tv_smooth_tradeoff.eps
nopts = 3;
alphas = [10 7 4];
xrecon = [];
for i=1:3
alpha = alphas(i);
u = 10; l = -10; normx = Inf;
while (abs(normx-alpha) > 1e-3)
lambda = 10^((u+l)/2);
x = (A'*A+lambda*speye(n+1,n+1)) \ (lambda*corrupt);
normx = norm(x-corrupt);
if (normx > alpha), l = (u+l)/2; else u = (u+l)/2; end;
end;
xrecon = [xrecon, x];
end;
figure(5)
subplot(311), plot(xrecon(:,1));
axis([0 n -2 2])
ylabel('ya');
title('quadratic smoothing with ||xhat-xcor||_2=10');
subplot(312), plot(xrecon(:,2));
axis([0 n -2 2])
ylabel('yb');
title('quadratic smoothing with ||xhat-xcor||_2=7');
subplot(313), plot(xrecon(:,3));
axis([0 n -2 2])
xlabel('x');
ylabel('yc');
title('quadratic smoothing with ||xhat-xcor||_2=4');
%print -deps tv_smooth_tradeoff_examples.eps
% figure 6.12, page 316
?