ROS机器人操作系统

文章目录
前言
前面我们学习了怎么用代码实现两个小海龟的跟随运动,很明显的感觉出真的好麻烦,在ROS中提供了一种launch文件可以帮助我们解决这一问题
一、launch是什么?
Launch文件:通过XML文件实现多节点的配置和启动(可自动启动ROS Master)
二、launch文件语法
launch文件中都是通过xml语法描述的
1.launch
launch文件中的根元素采用标签定义

2.node
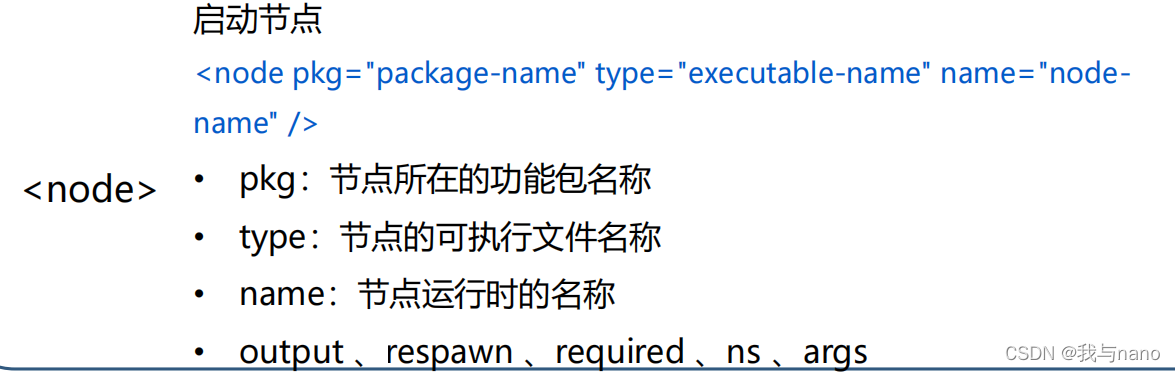
output:控制某个节点是不是要日志信息打印到当前终端里
respawn:控制节点启动运行失败是否进行重启
required:表示launch文件某个节点是否要求必须启动
ns:节点命名空间,避免冲突命名
args:给每个节点输入一些参数
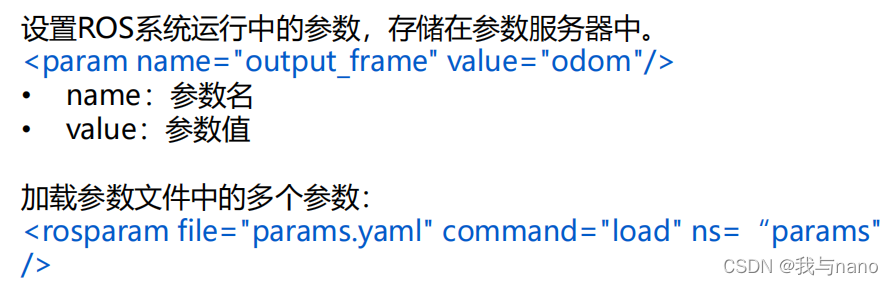
3.param / rosparam
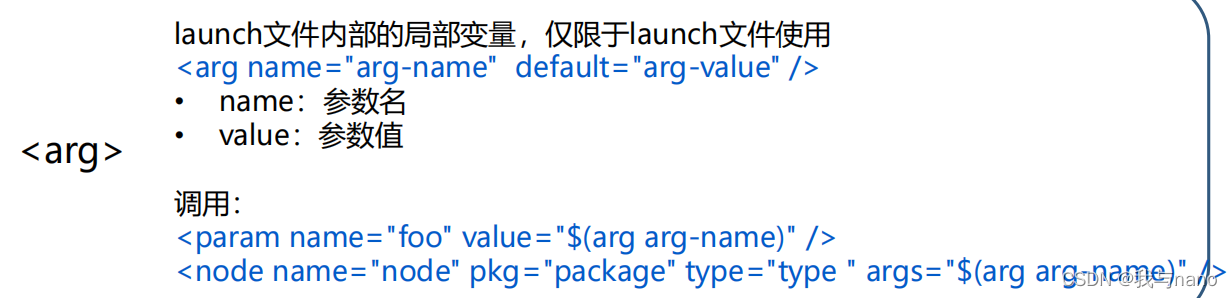
4.arg
5.重映射remap
重映射ROS计算图资源的命名。

6.嵌套include
包含其他launch文件,类似C语言中的头文件包含。

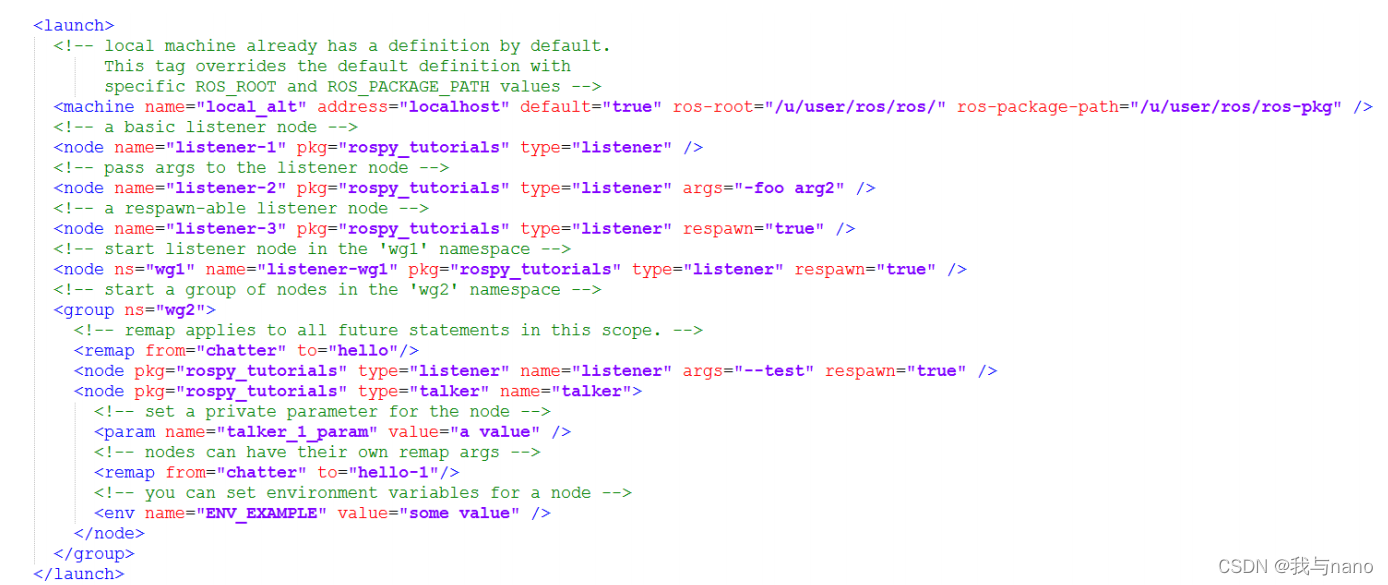
三、launch示例

<launch>
<node pkg="learning_topic" type="person_subscriber" name="talker" output="screen" />
<node pkg="learning_topic" type="person_publisher" name="listener" output="screen" />
</launch>
一个launch根标签包含两个node标签,两个node标签分别启动两个节点,output=screen将日志空间打印到终端。
launch文件启动方法:roslaunch命令
roslaunch 功能包名 功能包中launch文件名
roslaunch learning_launch simple.launch
可以同时启动多个节点。
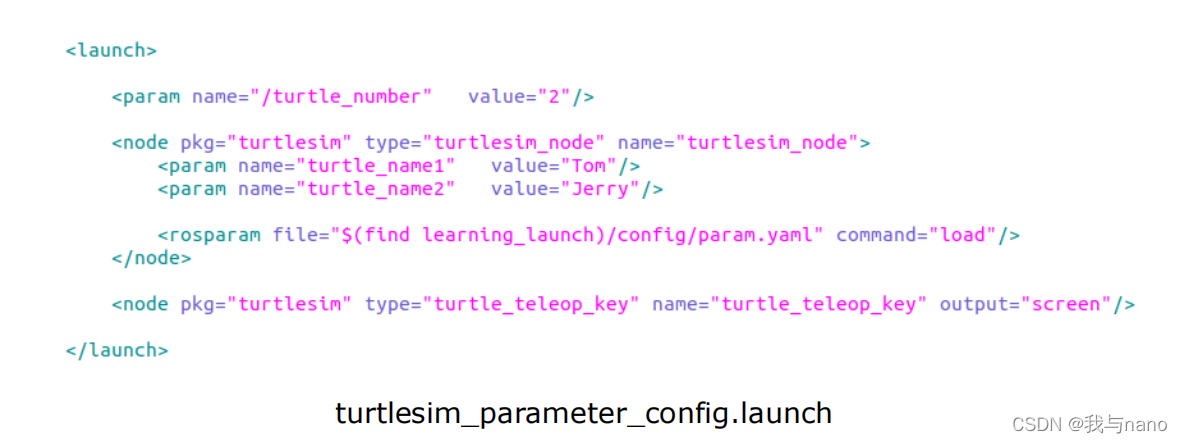
<launch>
<param name="/turtle_number" value="2"/> #param 和rosparam都是设置变量的 海龟的名字和个数
<node pkg="turtlesim" type="turtlesim_node" name="turtlesim_node"> #启动turlesim功能包的turtlesim_node节点 名字是turtlesim_node
<param name="turtle_name1" value="Tom"/> #创建参数的名字跟值
<param name="turtle_name2" value="Jerry"/>
<rosparam file="$(find learning_launch)/config/param.yaml" command="load"/>
</node> #用rosparam标签去加载参数文件
<node pkg="turtlesim" type="turtle_teleop_key" name="turtle_teleop_key" output="screen"/>
#启动键盘控制节点
</launch>
param设置ROS系统中参数,这个是很常用的。

运行后可以看到名字是turtlesim_node/…因为我们把turtlesim_node写在了里面
ROS的规则:优先将节点名作为最前面的命名空间
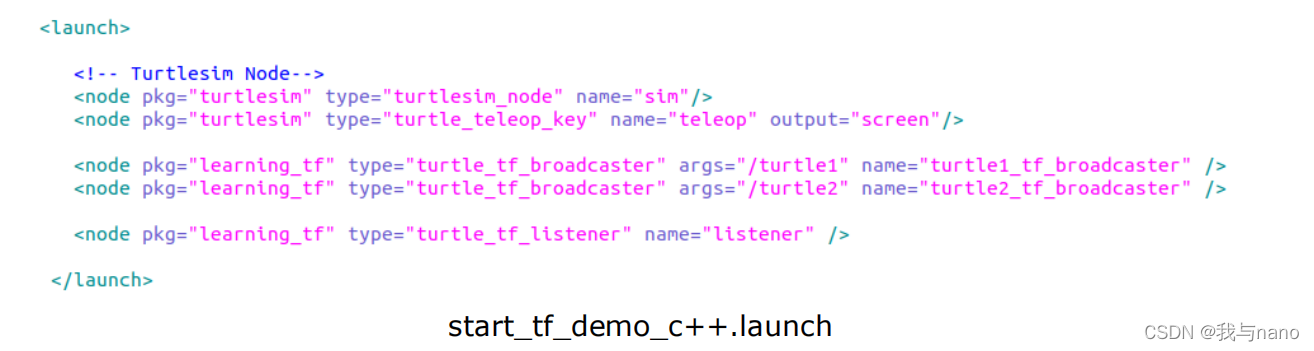
<launch>
<!-- Turtlesim Node-->
<node pkg="turtlesim" type="turtlesim_node" name="sim"/>#启动小海龟仿真器
<node pkg="turtlesim" type="turtle_teleop_key" name="teleop" output="screen"/>
#启动键盘控制节点
<node pkg="learning_tf" type="turtle_tf_broadcaster" args="/turtle1" name="turtle1_tf_broadcaster" />#启动广播器
<node pkg="learning_tf" type="turtle_tf_broadcaster" args="/turtle2" name="turtle2_tf_broadcaster" />
<node pkg="learning_tf" type="turtle_tf_listener" name="listener" />
#监听位置关系,小海龟跟随
</launch>
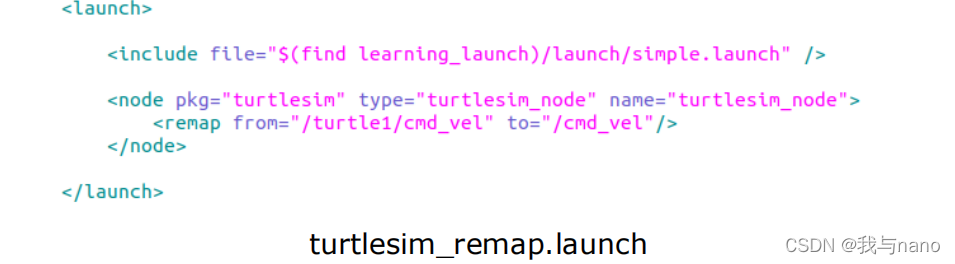
<launch>
<include file="$(find learning_launch)/launch/simple.launch" />
<node pkg="turtlesim" type="turtlesim_node" name="turtlesim_node">
<remap from="/turtle1/cmd_vel" to="/cmd_vel"/> #将to后面的内容替换成from后面的内容
</node>
</launch>
总结
launch是ROS机器人操作系统中最重要的一个功能,launch的使用一定要熟练掌握。