ϵ������Ŀ¼
��SLAM�о�������Bug���ܡ�
ǰ��
SLAM�������
ʹ��evo��������ORB-SLAM3��EuRoc��MH-01����
����:[ERROR]TUM trajectory files must have 8 entries per row and no trailing delimiter at the end of the rows (space)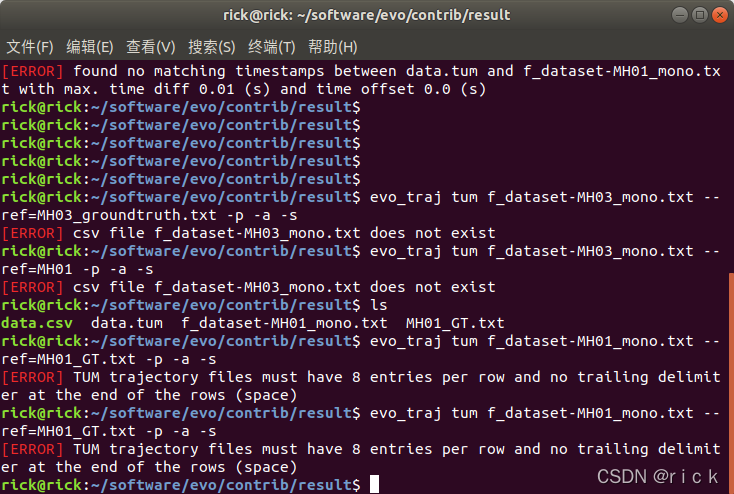
�������:
��Ŀ��:��ORB_SLAM3-master/evaluation/Ground_truth/EuRoC_left_cam/MH01_GT.txt�ļ����Ƶ�/ORB_SLAM3-master/Example/�ļ���,��txt�ĵ�,������Ķ���
,ȫ���滻�ɿո�Ȼ����ն�,����
#���ƹ켣:
evo_traj tum f_dataset-MH01_mono.txt --ref=MH01_GT.txt -p -a -s
#����:
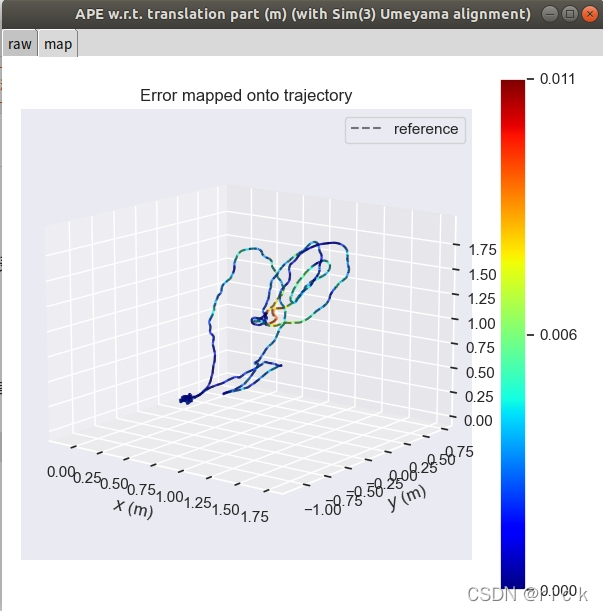
evo_ape tum f_dataset-MH01_mono.txt MH01_GT.txt -p -a -s
- EVO�������:
-p��Cplot ��ͼ
-v��Cverbose ��������Ϣ(��ֵ,�����)
-f��Cfull_check��������Ϣ(ʱ����Ƿ��Ӧ,��Ԫ���Dz��ǵ�λ��Ԫ��)
-a��Calign�Թ켣������,��ICP�ķ���,�����ǽ�����������
-s/�C�Ccorrect_scale ������߶�