pytorch 数据读取机制
PyTorch中对于数据集的处理有三个非常重要的类:Dataset、Dataloader、Sampler,它们均是 torch.utils.data 包下的模块(类)。
torch/utils/data下面一共含有4个主文件
|---- dataloader.py
|---- dataset.py
|---- distributed.py
|---- sample.py
pytorch 的数据加载到模型的操作顺序是这样的:
① 创建一个 Dataset 对象
② 创建一个 DataLoader 对象
③ 循环这个 DataLoader 对象,通过dataset、sampler参数将img, label加载到模型中进行训练

dataloader \dataset \sampler概述
dataloader \dataset \sampler三者关系
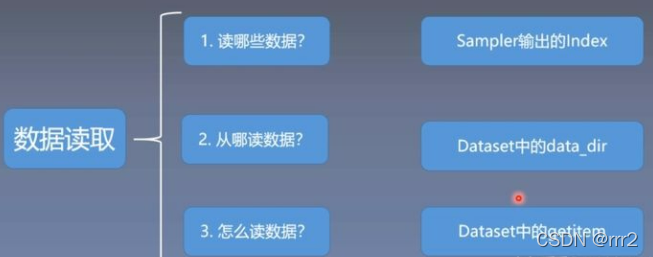
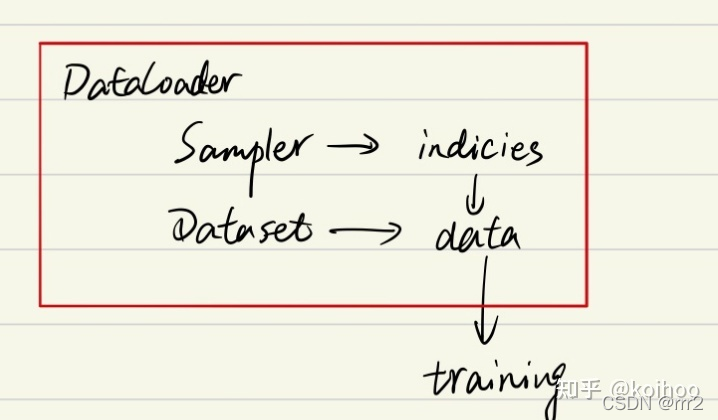

- Dataset是数据集的类,主要用于定义数据集
- Sampler是采样器的类,用于定义从数据集中选出数据的规则,比如是随机取数据还是按照顺序取等等
- Dataloader是数据的加载类,Dataset和Sampler会作为参数传递给Dataloader,是对于Dataset和Sampler的进一步包装,用于实际读取数据,可以理解为它是这个工作的真正实践者,而Dataset和Sampler则负责定义。我们训练、测试所获得的数据也是Dataloader直接给我们的。
torch.utils.data Dataset
我们通过定义继承自这个类的子类来自定义数据集。它有两个最重要的方法需要重写,实际上它们都是类的特殊方法:
getitem(self, index):传入参数index为下标,返回数据集中对应下标的数据组(数据和标签)
len(self):返回数据集的大小
Dataset的目标是根据你输入的索引输出对应的image和label,而且这个功能是要在__getitem__()函数中完成的,所以当你自定义数据集的时候,首先要继承Dataset类,还要复写__getitem__()函数。
torch.utils.data DataLoader
Dataloader对Dataset(和Sampler等)打包,完成最后对数据的读取的执行工作,一般不需要自己定义或者重写一个Dataloader的类(或子类),直接使用即可,通过传入参数定制Dataloader,定制化的功能应该在Dataset(和Sampler等)中完成了。
from torch.utils.data import DataLoader
def __init__(self, dataset,
batch_size=1,
shuffle=False,
sampler=None,
batch_sampler=None,
num_workers=0,
collate_fn=None,
pin_memory=False,
drop_last=False,
timeout=0,
worker_init_fn=None,
multiprocessing_context=None):
from torch.utils.data import DataLoader
DataLoader,它是PyTorch中数据读取的一个重要接口,该接口定义在dataloader.py中,只要是用PyTorch来训练模型基本都会用到该接口(除非用户重写…)
该接口的目的:将自定义的Dataset根据batch size大小、是否shuffle等封装成一个Batch Size大小的Tensor,用于后面的训练。
dataset(Dataset): 传入的数据集
-
batch_size(int, optional): 每个batch有多少个样本
-
shuffle(bool, optional): 在每个epoch开始的时候,对数据进行重新排序
-
sampler(Sampler, optional): 自定义从数据集中取样本的策略,如果指定这个参数,那么shuffle必须为False
-
batch_sampler(Sampler, optional): 与sampler类似,但是一次只返回一个batch的indices(索引),需要注意的是,一旦指定了这个参数,那么batch_size,shuffle,sampler,drop_last就不能再制定了(互斥――Mutually exclusive)
-
num_workers (int, optional): 这个参数决定了有几个进程来处理data loading。0意味着所有的数据都会被load进主进程。(默认为0)
-
pin_memory (bool, optional): 如果设置为True,那么data loader将会在返回它们之前,将tensors拷贝到CUDA中的固定内存(CUDA pinned memory)中.
-
collate_fn (callable, optional): 将一个list的sample组成一个mini-batch的函数
-
drop_last (bool, optional): 这个是对最后的未完成的batch来说的,比如你的batch_size设置为64,而一个epoch只有100个样本,如果设置为True,那么训练的时候后面的36个就被扔掉了…
如果为False(默认),那么会继续正常执行,只是最后的batch_size会小一点。 -
timeout(numeric, optional): 如果是正数,表明等待从worker进程中收集一个batch等待的时间,若超出设定的时间还没有收集到,那就不收集这个内容了。这个numeric应总是大于等于0。默认为0
-
worker_init_fn (callable, optional): 每个worker初始化函数 If not None, this will be called on each
worker subprocess with the worker id (an int in [0, num_workers - 1]) as input, after seeding and before data loading. (default: None)
torch.utils.data.sampler
from torch.utils.data.sampler import Sampler
Sampler类是一个很抽象的父类,其主要用于设置从一个序列中返回样本的规则,即采样的规则。Sampler是一个可迭代对象,使用step方法可以返回下一个迭代后的结果,因此其主要的类方法就是 iter 方法,定义了迭代后返回的内容。
但是,Dataloader中的sampler和batch_sampler参数默认情况下使用的那些采样器(RandomSampler、SequentialSampler和BatchSampler)一样,PyTorch自己实现了很多Sampler的子类,这些采样器其实可以完成大部分功能,所以基本只需要关注一些Sampler的子类以及他们的用法。
SequentialSampler
SequentialSampler就是一个按照顺序进行采样的采样器,接收一个数据集做参数(实际上任何可迭代对象都可),按照顺序对其进行采样。
from torch.utils.data import SequentialSampler
pseudo_dataset = list(range(10))
for data in SequentialSampler(pseudo_dataset):
print(data, end=" ")
0 1 2 3 4 5 6 7 8 9
RandmSampler
RandomSampler 即一个随机采样器,返回随机采样的值,第一个参数依然是一个数据集(或可迭代对象)。还有一组参数如下:
- replacement:bool值,默认是False,设置为True时表示可以采出重复的样本
- num_samples:只有在replacement设置为True的时候才能设置此参数,表示要采出样本的个数,默认为数据集的总长度。有时候由于replacement置True的原因导致重复数据被采样,导致有些数据被采不到,所以往往会设置一个比较大的值.
from torch.utils.data import RandomSampler
pseudo_dataset = list(range(10))
randomSampler1 = RandomSampler(pseudo_dataset)
randomSampler2 = RandomSampler(pseudo_dataset, replacement=True, num_samples=20)
print("for random sampler #1: ")
for data in randomSampler1:
print(data, end=" ")
print("\n\nfor random sampler #2: ")
for data in randomSampler2:
print(data, end=" ")
for random sampler #1:
4 5 2 9 3 0 6 8 7 1
for random sampler #2:
4 9 0 6 9 3 1 6 1 8 5 0 2 7 2 8 6 4 0 6
SubsetRandomSampler
SubsetRandomSampler可以设置子集的随机采样,多用于将数据集分成多个集合,比如训练集和验证集的时候使用:
from torch.utils.data import SubsetRandomSampler
pseudo_dataset = list(range(10))
subRandomSampler1 = SubsetRandomSampler(pseudo_dataset[:7])
subRandomSampler2 = SubsetRandomSampler(pseudo_dataset[7:])
print("for subset random sampler #1: ")
for data in subRandomSampler1:
print(data, end=" ")
print("\n\nfor subset random sampler #2: ")
for data in subRandomSampler2:
print(data, end=" ")
for subset random sampler #1:
0 4 6 5 3 2 1
for subset random sampler #2:
7 8 9
BatchSampler
以上的四个Sampler在每次迭代都只返回一个索引,而BatchSampler的作用是对上述这类返回一个索引的采样器进行包装,按照设定的batch size返回一组索引,因其他的参数和上述的有些不同:
- sampler:一个Sampler对象(或者一个可迭代对象)
- batch_size:batch的大小
- drop_last:是否丢弃最后一个可能不足batch size大小的数据
from torch.utils.data import BatchSampler
pseudo_dataset = list(range(10))
batchSampler1 = BatchSampler(pseudo_dataset, batch_size=3, drop_last=False)
batchSampler2 = BatchSampler(pseudo_dataset, batch_size=3, drop_last=True)
print("for batch sampler #1: ")
for data in batchSampler1:
print(data, end=" ")
print("\n\nfor batch sampler #2: ")
for data in batchSampler2:
print(data, end=" ")
for batch sampler #1:
[0, 1, 2] [3, 4, 5] [6, 7, 8] [9]
for batch sampler #2:
[0, 1, 2] [3, 4, 5] [6, 7, 8]
torchvision
torchvision 是PyTorch中专门用来处理图像的库,PyTorch官网的安装教程,也会让你安装上这个包。
这个包中有四个大类。
torchvision.datasets
torchvision.models
torchvision.transforms
torchvision.utils
torchvision.datasets
import torchvision.datasets as datasets
torchvision.datasets 是用来进行数据加载的,PyTorch团队在这个包中帮我们提前处理好了很多很多图片数据集。
__all__ = ('LSUN', 'LSUNClass',
'ImageFolder', 'DatasetFolder', 'FakeData',
'CocoCaptions', 'CocoDetection',
'CIFAR10', 'CIFAR100', 'EMNIST', 'FashionMNIST', 'QMNIST',
'MNIST', 'KMNIST', 'STL10', 'SVHN', 'PhotoTour', 'SEMEION',
'Omniglot', 'SBU', 'Flickr8k', 'Flickr30k',
'VOCSegmentation', 'VOCDetection', 'Cityscapes', 'ImageNet',
'Caltech101', 'Caltech256', 'CelebA', 'WIDERFace', 'SBDataset',
'VisionDataset', 'USPS', 'Kinetics400', 'HMDB51', 'UCF101',
'Places365')
import torchvision
trainset= torchvision.dataset.MNIST(root='./data'
train=True,
transform=None)
train_Loader=Dataloader(dataset=trainset,
batch_size=32,
shuffle=False)
print("训练集大小",len(trainset))
print("训练集批次",len(train_loader))
torchvision.models
torchvision.models 中为我们提供了已经训练好的模型,让我们可以加载之后,直接使用。
torchvision.models模块的 子模块中包含以下模型结构。
from .alexnet import *
from .resnet import *
from .vgg import *
from .squeezenet import *
from .inception import *
from .densenet import *
from .googlenet import *
from .mobilenet import *
from .mnasnet import *
from .shufflenetv2 import *
from . import segmentation
from . import detection
from . import video
from . import quantization
快速创建一个权重随机初始化的模型
import torchvision.models as models
resnet18 = models.resnet18()
alexnet = models.alexnet()
squeezenet = models.squeezenet1_0()
densenet = models.densenet_161()
也可以通过使用 pretrained=True 来加载一个别人预训练好的模型
import torchvision.models as models
resnet18=models.resnet18(pretrained = True)
print(resnet18)
torchvision.transforms
transforms 模块提供了一般的图像转换操作类。
class torchvision.transforms.ToTensor
把shape=(H x W x C)的像素值范围为[0, 255]的PIL.Image或者numpy.ndarray转换成shape=(C x H x W)的像素值范围为[0.0, 1.0]的torch.FloatTensor。
class torchvision.transforms.Normalize(mean, std)
给定均值(R, G, B)和标准差(R, G, B),用公式channel = (channel - mean) / std进行规范化。
# 我们这里还是对MNIST进行处理,初始的MNIST是 28 * 28,我们把它处理成 96 * 96 的torch.Tensor的格式
from torchvision import transforms as transforms
import torchvision
from torch.utils.data import DataLoader
# 图像预处理步骤
transform = transforms.Compose([
transforms.Resize(96), # 缩放到 96 * 96 大小
transforms.ToTensor(),
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5)) # 归一化
])
DOWNLOAD = True
BATCH_SIZE = 32
train_dataset = torchvision.datasets.MNIST(root='./data/', train=True, transform=transform, download=DOWNLOAD)
train_loader = DataLoader(dataset=train_dataset,
batch_size=BATCH_SIZE,
shuffle=True)
print(len(train_dataset))
print(len(train_loader))
ref
https://github.com/LianHaiMiao/pytorch-lesson-zh/
https://zhuanlan.zhihu.com/p/91521705
https://blog.csdn.net/g11d111/article/details/81504637
https://zhuanlan.zhihu.com/p/400830261