�ֲ�ͼ��������
1. Harris�ǵ���
1.1 ��ظ���
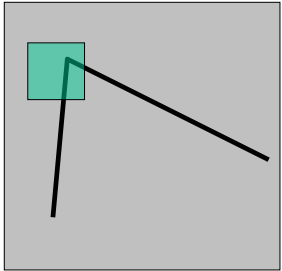
�ǵ�:
? �ֲ������ظ������ƶ�,���������Ա仯�ĵ�
? ͼ��ֲ�����ͻ��ĵ�
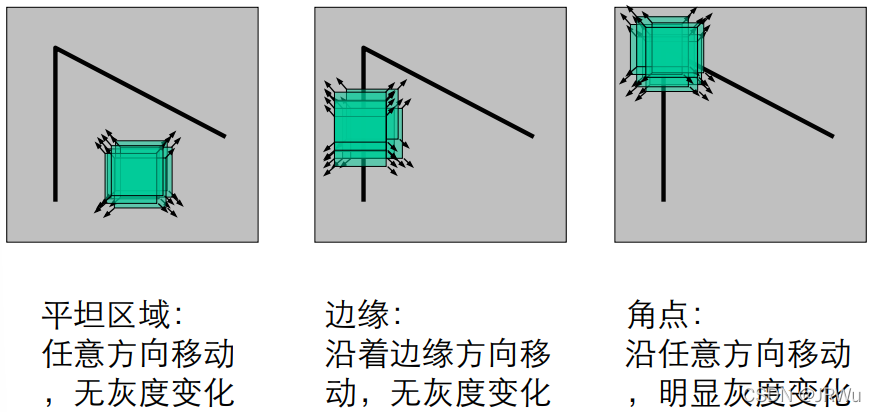
��ͬ���͵Ľǵ�:
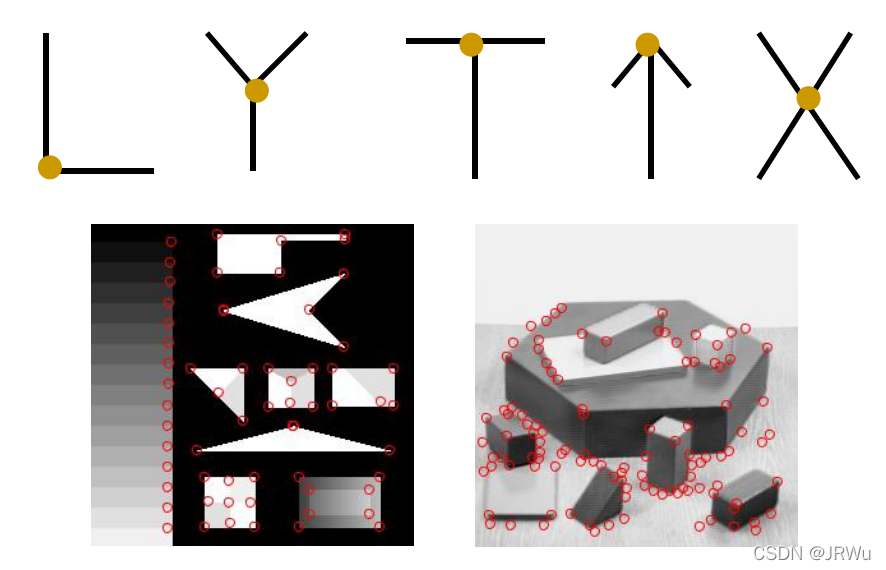
1.2. Harris�ǵ������˼��
? ��ͼ��ֲ���С���ڹ۲�ͼ������
? �ǵ㶨�崰�������ⷽ����ƶ�������ͼ��Ҷȵ����Ա仯
1.3. ��ѧ����
Harris�ǵ����㷨��һ������Ľǵ����㷨,����Ҫ˼����,���������Χ��ʾ���ڶ���һ������ı�,������Ϊ�õ�Ϊ��Ȥ��,�ֳ�Ϊ�ǵ㡣
���ǰ�ͼ�����е�x�ϵĶԳư���������
M
l
=
M
I
(
x
)
M_l=M_I(x)
Ml?=MI?(x)����Ϊ:
M
l
=
��
I
��
I
T
=
[
I
x
I
y
]
[
I
x
I
y
]
=
[
I
x
2
I
x
I
y
I
x
I
y
I
y
2
]
M_l=\bigtriangledown I \bigtriangledown I^T=\begin{bmatrix} I_x\\ I_y \end{bmatrix}\begin{bmatrix} I_x &I_y \end{bmatrix}=\begin{bmatrix} I_x^2 & I_xI_y\\ I_xI_y& I_y^2 \end{bmatrix}
Ml?=��I��IT=[Ix?Iy??][Ix??Iy??]=[Ix2?Ix?Iy??Ix?Iy?Iy2??]
����ͼ���ÿһ������,���ǿ��Լ�����þ���,�ٽ������Ȩ�ؾ���W,���ǿ��Եõ�����������������ľ����ֳ���Harris����
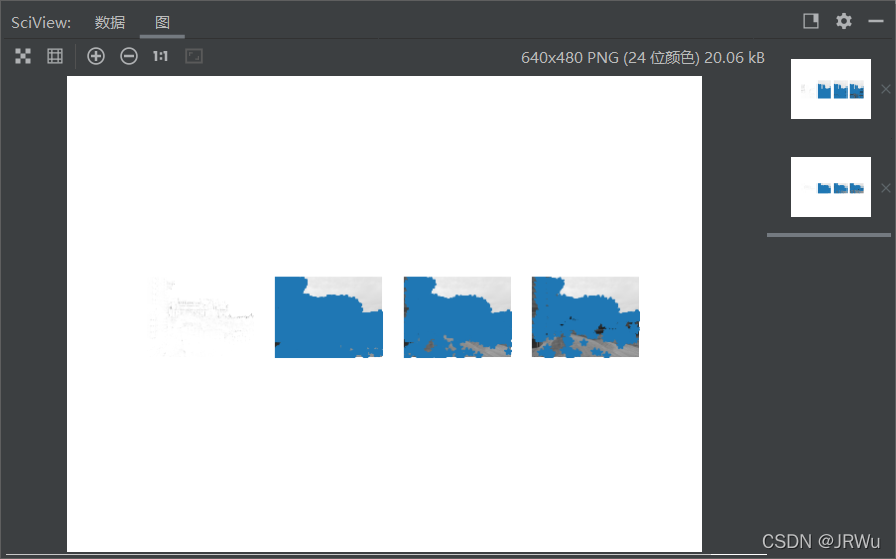
1.4. Harris�ǵ���ʵ��
����:
from pylab import *
from PIL import Image
from PCV.localdescriptors import harris
"""
Example of detecting Harris corner points (Figure 2-1 in the book).
"""
# ����ͼ��
im = array(Image.open('1.jpg').convert('L'))
# ���harris�ǵ�
harrisim = harris.compute_harris_response(im)
# Harris��Ӧ����
harrisim1 = 255 - harrisim
figure()
gray()
#����Harris��Ӧͼ
subplot(141)
imshow(harrisim1)
print(harrisim1.shape)
axis('off')
axis('equal')
threshold = [0.01, 0.05, 0.1]
for i, thres in enumerate(threshold):
filtered_coords = harris.get_harris_points(harrisim, 6, thres)
subplot(1, 4, i+2)
imshow(im)
print(im.shape)
plot([p[1] for p in filtered_coords], [p[0] for p in filtered_coords], '*')
axis('off')
#ԭ����õ�PCV��PCV harrisģ��
#harris.plot_harris_points(im, filtered_coords)
# plot only 200 strongest
# harris.plot_harris_points(im, filtered_coords[:200])
show()
ԭͼ:

����:

ԭͼ:

����:
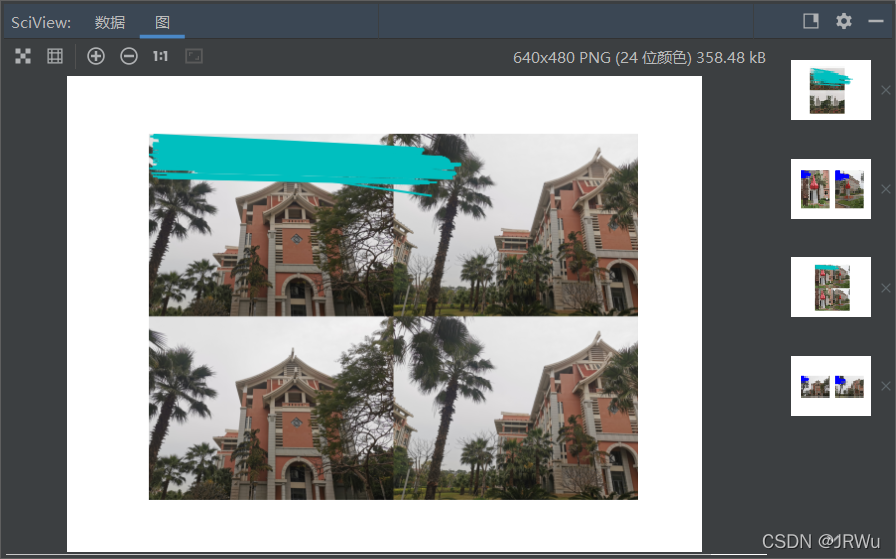
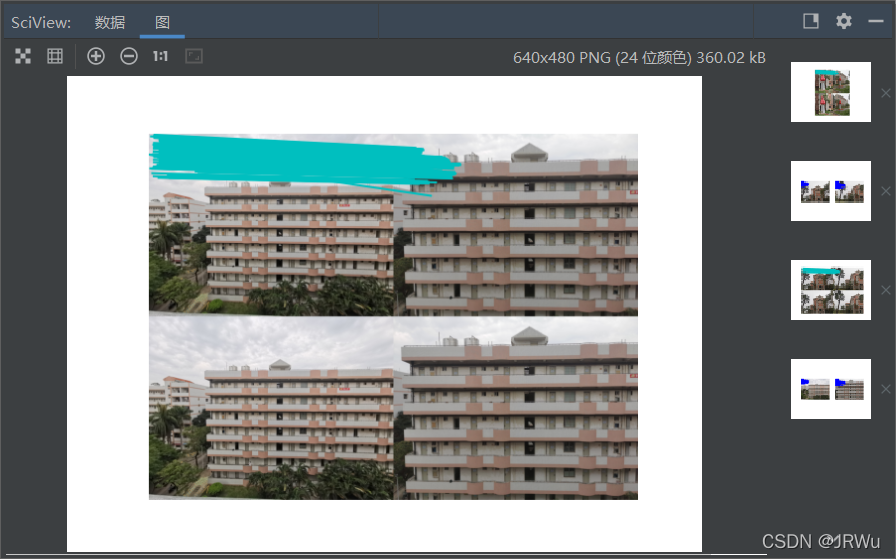
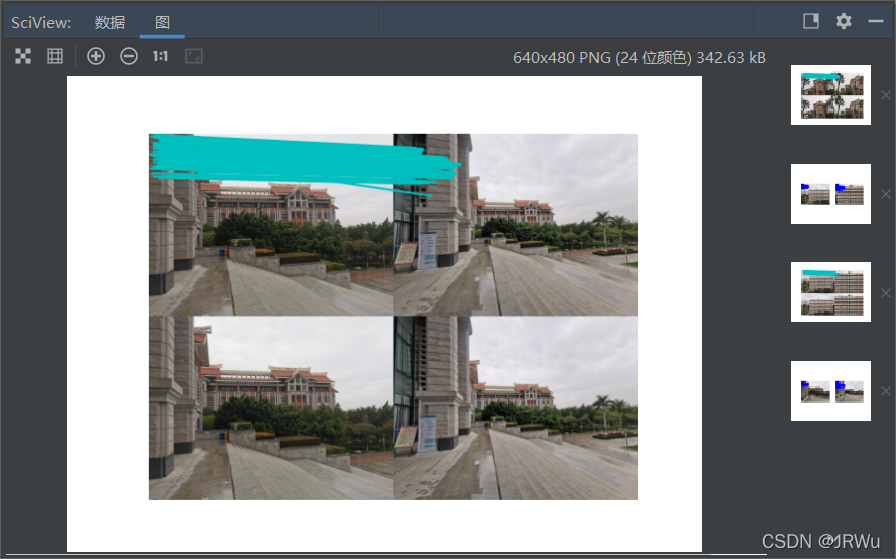
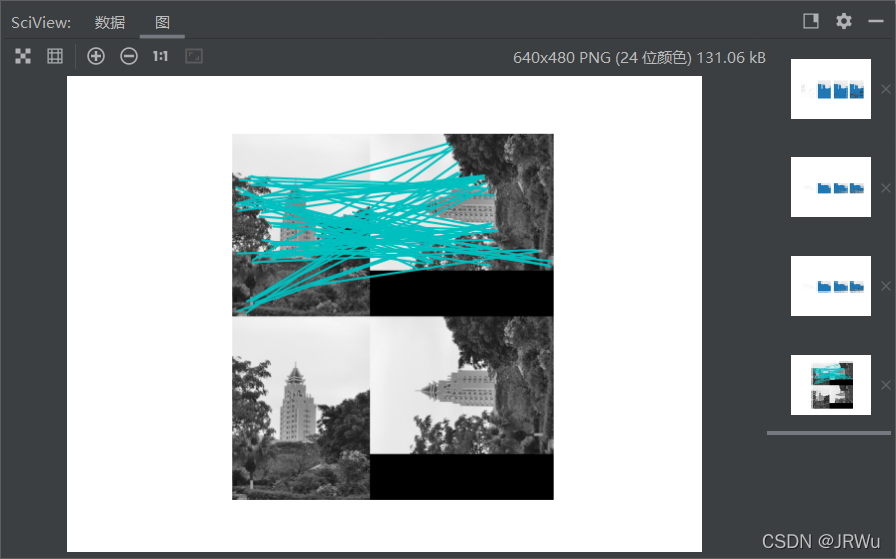
1.5. Harris�ǵ�ƥ��ʵ��
��������:
#Harris�ǵ�ƥ��
from pylab import *
from PIL import Image
from PCV.localdescriptors import harris
from PCV.tools.imtools import imresize
"""
This is the Harris point matching example in Figure 2-2.
"""
# Figure 2-2�����ͼ
#im1 = array(Image.open("../data/crans_1_small.jpg").convert("L"))
#im2= array(Image.open("../data/crans_2_small.jpg").convert("L"))
# Figure 2-2�����ͼ
im1 = array(Image.open('3.jpg').convert("L"))
im2 = array(Image.open('4.jpg').convert("L"))
# resize�ӿ�ƥ���ٶ�
im1 = imresize(im1, (im1.shape[1]//2, im1.shape[0]//2))
im2 = imresize(im2, (im2.shape[1]//2, im2.shape[0]//2))
wid = 5
harrisim = harris.compute_harris_response(im1, 5)
filtered_coords1 = harris.get_harris_points(harrisim, wid+1)
d1 = harris.get_descriptors(im1, filtered_coords1, wid)
harrisim = harris.compute_harris_response(im2, 5)
filtered_coords2 = harris.get_harris_points(harrisim, wid+1)
d2 = harris.get_descriptors(im2, filtered_coords2, wid)
print('starting matching')
matches = harris.match_twosided(d1, d2)
figure()
gray()
harris.plot_matches(im1, im2, filtered_coords1, filtered_coords2, matches)
show()
����:
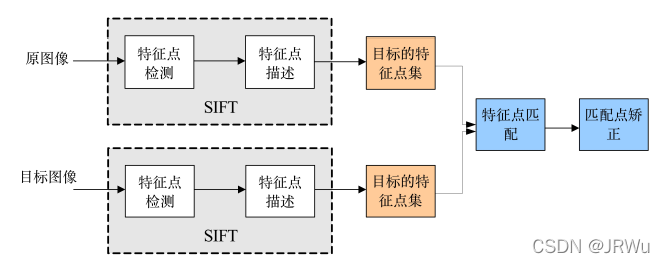
2. SIFT����ƥ���㷨
2.1 ���
SIFT(Scale Invariant Feature Transform),�߶Ȳ��������任�� ��������ƥ��ĺ����ǽ�Ŀ���ڲ�ͬ������ʱ�������ɵ������Ӧ��SIFT��ͬ�ڴ�ͳ��ƥ���㷨����Ե�ͽǵ���Ϊ�б�����,���ǽ�ͼ��ӳ��Ϊһ���ֲ�����������,�����ͼ�����������š��ƶ�����ת���ƥ�����⡣
SIFT�㷨���Խ��������:
? Ŀ�����ת�����š�ƽ��(RST)
? ͼ�����/ͶӰ�任(�ӵ�viewpoint)
? ������Ӱ��(illumination)
? ����Ŀ���ڵ�(occlusion)
? ���ﳡ��(clutter)
? ����
2.2. ʵ�ֲ���
���:ʵ�ʿ��Թ�Ϊ�ڲ�ͬ�߶ȿռ��ϲ���������(�ؼ���)�����⡣
SIFT�㷨ʵ������ƥ����Ҫ����������:
1����ȡ�ؼ���;
2���Թؼ��㸽����ϸ����Ϣ(�ֲ�����),��������;
3��ͨ��������(���������������Ĺؼ���)�������Ƚ��ҳ��ƥ������ɶ�������,���������Ķ�Ӧ��ϵ��
2.3. ��ظ���
(1)��Щ����SIFT��Ҫ���ҵĹؼ���(������)?
��Щ����һЩʮ��ͻ���ĵ�,��������ա��߶ȡ���ת�����صĸı����ʧ,����ǵ㡢��Ե�㡢������������Լ�������İ��㡣�ٶ�����ͼ��������ͬ�ľ���,��ôʹ��ij���㷨�ֱ���ȡ���Ե�������,��Щ��֮��������Ӧ��ƥ���ϵ��
�ɴ����ǿ��Կ���SIFT������ϣ��ѡ���������������Եĵ�:�߶ȡ�����λ�ơ����ա�
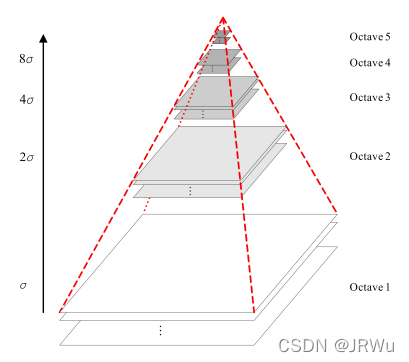
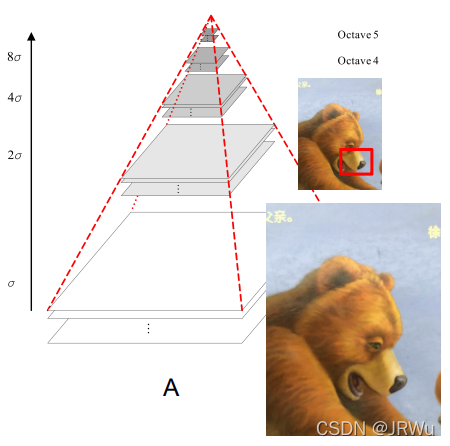
(2)ʲô�dz߶ȿռ�?
�߶ȿռ�����������1962�����,����Ҫ˼����ͨ����ԭʼͼ����г߶ȱ任,���ͼ���߶��µĿռ��ʾ���Ӷ�ʵ�ֱ�Ե���ǵ���Ͳ�ͬ�ֱ����ϵ�������ȡ,������������ij߶Ȳ����ԡ�
�߶ȿռ��и��߶�ͼ���ģ���̶����,�ܹ�ģ�����ھ���Ŀ���ɽ���ԶʱĿ��������Ĥ�ϵ��γɹ��̡�
�߶�Խ��ͼ��Խģ����
(3)��˹ģ��
��˹ģ������Adobe Photoshop��ͼ���������й㷺ʹ�õĴ���Ч��,ͨ����������Сͼ�������Լ�����ϸ�ڲ�Ρ�����ģ���������ɵ�ͼ����Ӿ�Ч���Ǻ���һ����������Ļ�۲�ͼ��
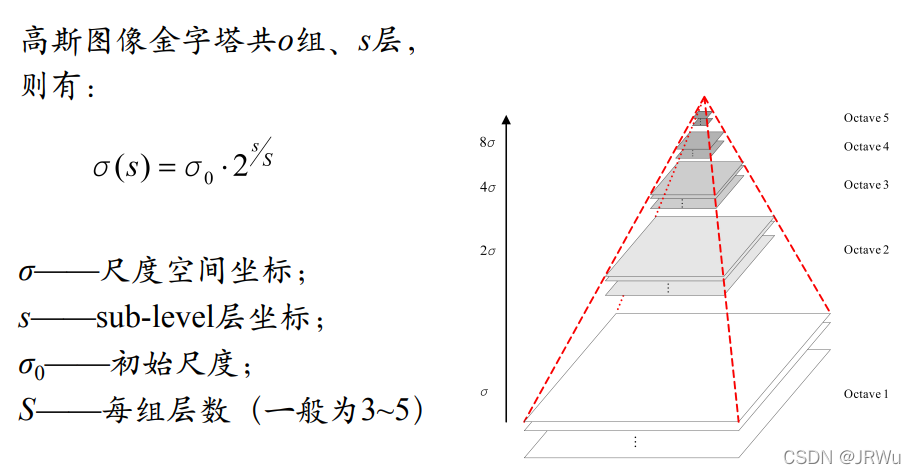
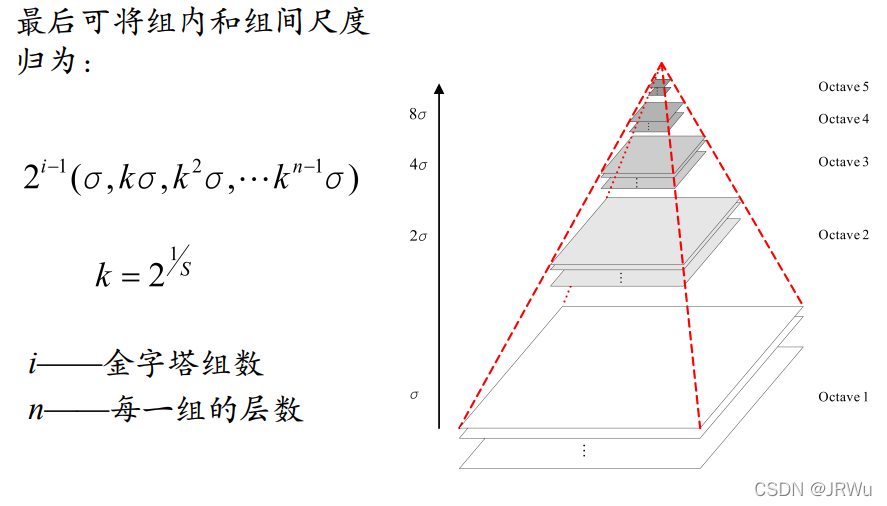
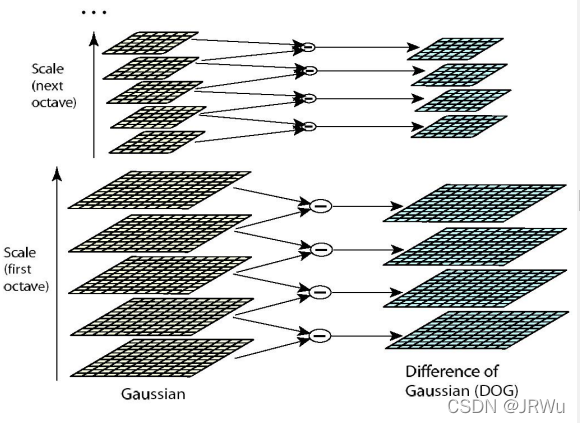
(4)��˹������
��˹�������Ĺ������̿ɷ�Ϊ����:
(1)��ͼ������˹ƽ��;
(2)��ͼ������������
Ϊ���ó߶�������������,�ڼ��²����Ļ����ϼ����˸�˹�˲���һ��ͼ����Բ�������(octave)ͼ��,һ��ͼ���������(interval)ͼ��
(5)�ؼ����⡪��DOG
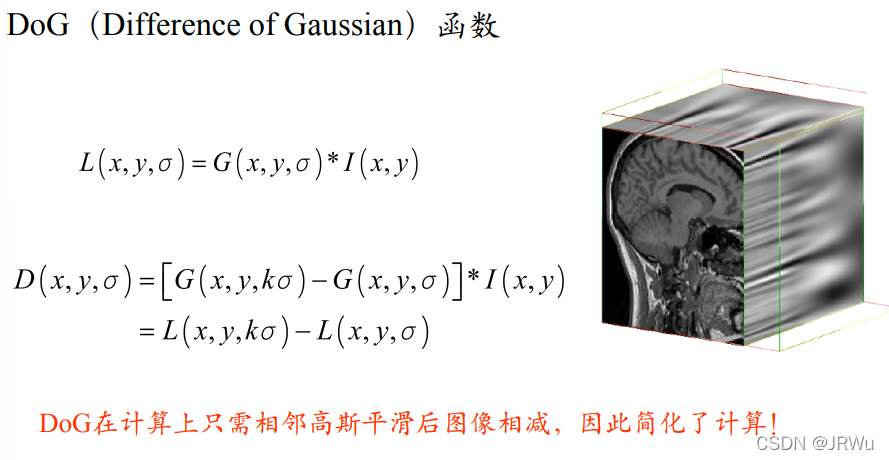
DoG��˹��ֽ�����,��ӦDOG����,�蹹��DOG��������
����ͨ����˹���ͼ������ͼ���ϵ�����ֵ�仯�����(���û�б仯,Ҳ��û�����������������DZ仯�����ܶ�ĵ㡣)DOGͼ��������Ŀ���������
(6)DOG�ֲ���ֵ���
DOG�ľֲ���ֵ��
����������DOG�ռ�ľֲ���ֵ����ɵġ�Ϊ��Ѱ��DoG�����ļ�ֵ��,ÿһ�����ص�Ҫ�������е����ڵ�Ƚ�,�����Ƿ������ͼ����ͳ߶�������ڵ�����С��
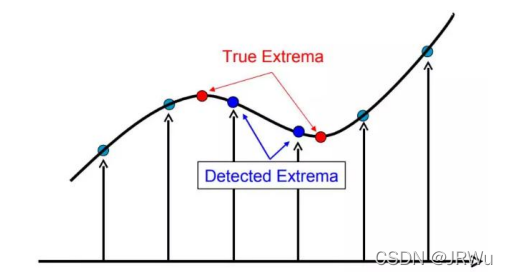
�м�ļ������ͬ�߶ȵ�8�����ڵ���������ڳ߶ȶ�Ӧ��9��2���㹲26����Ƚ�,��ȷ���ڳ߶ȿռ�Ͷ�άͼ��ռ䶼����ֵ�㡣
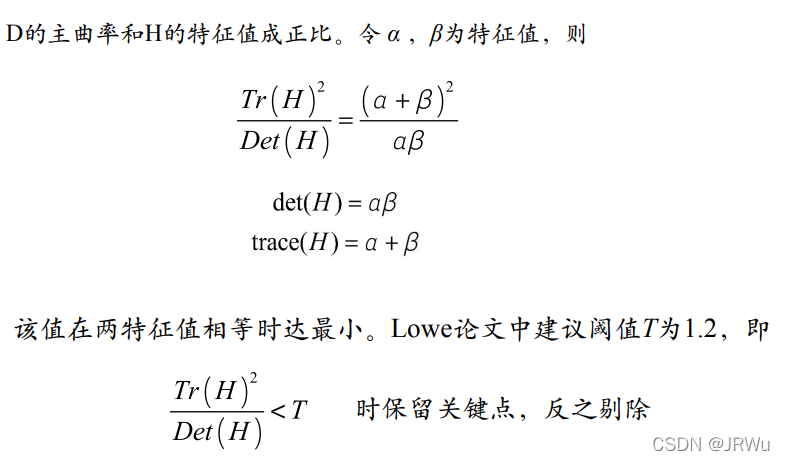
ȥ����Ե��Ӧ
����DoG������ͼ���Ե�н�ǿ�ı�Ե��Ӧ,�����Ҫ�ų���Ե��Ӧ��
DoG�����ķ�ֵ���ڱ�Ե�����нϴ��������,���ڴ�ֱ��Ե�ķ����н�С�������ʡ������ʿ���ͨ�������ڸõ�λ�ó߶ȵ�2��2��Hessian����õ�,�����ɲ��������ڲ�������:
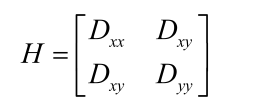
D
x
x
D_{xx}
Dxx?��ʾDOG��������ijһ�߶ȵ�ͼ��x����������
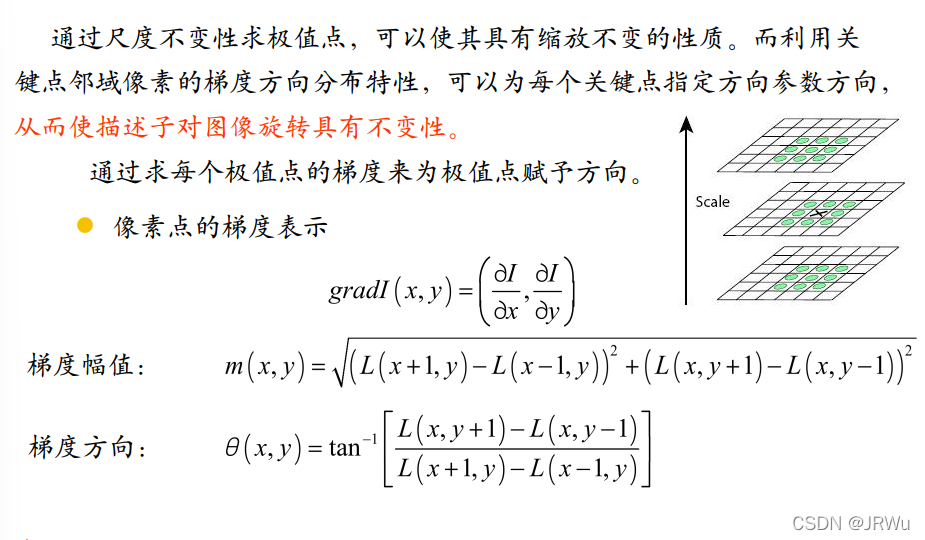
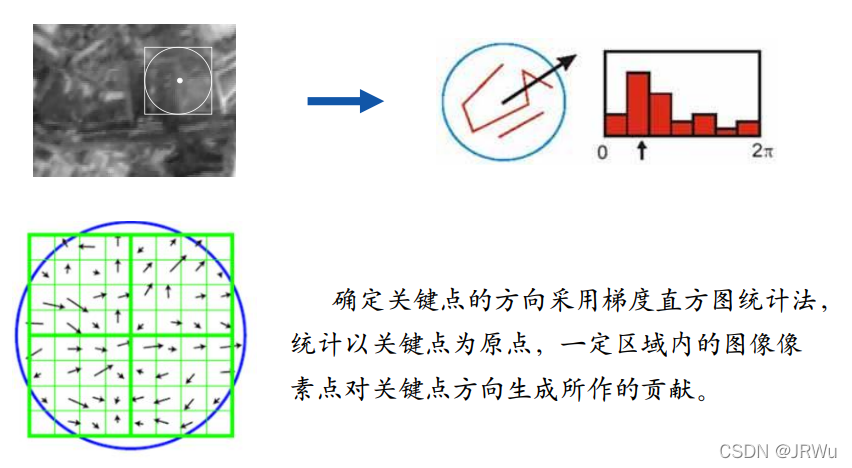
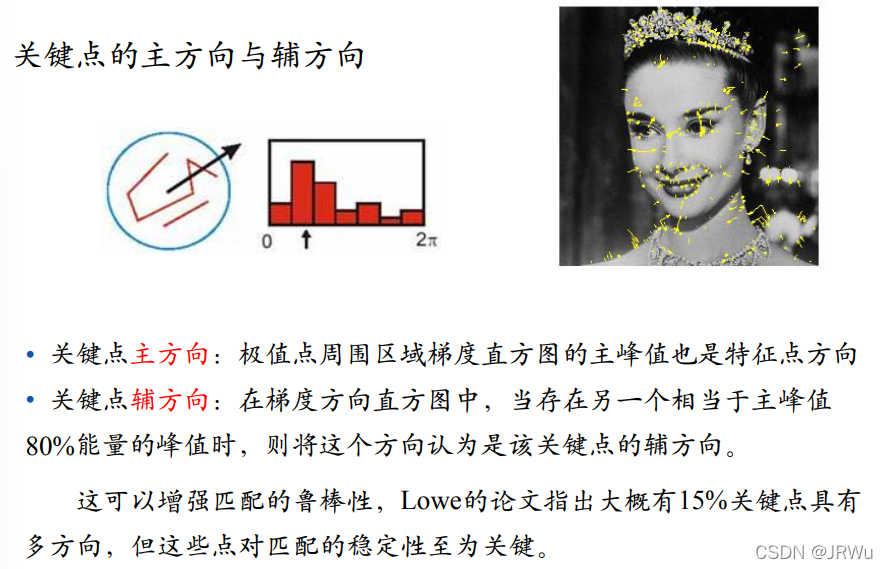
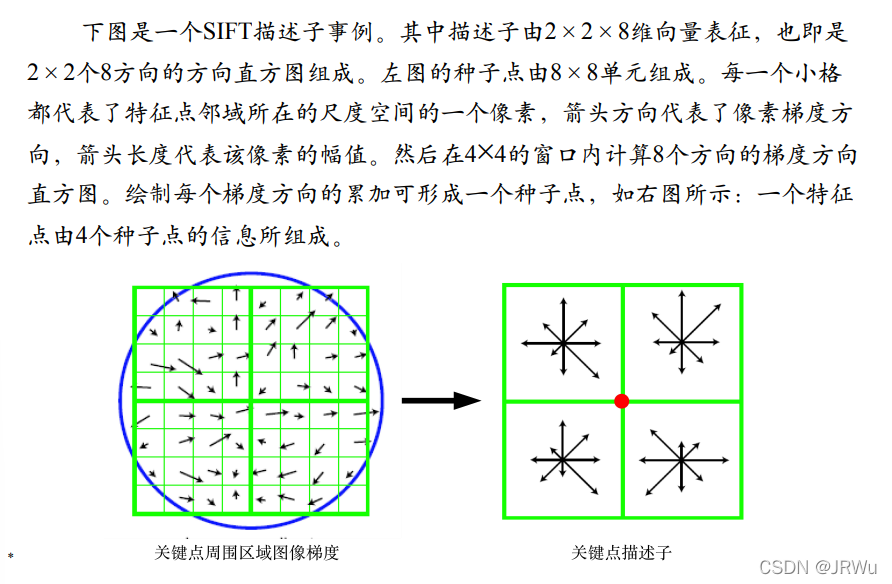
����ֱ��ͼ������
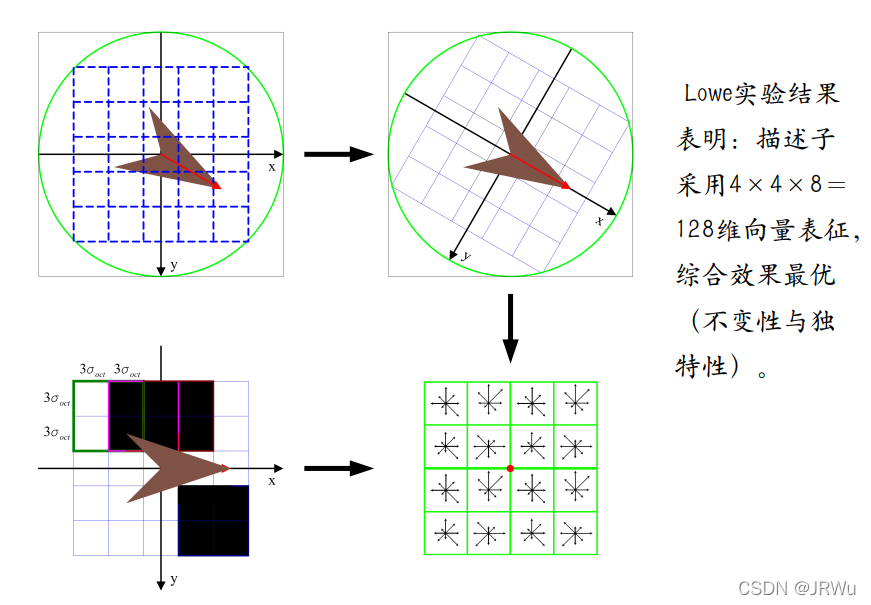
�ؼ���ƥ��
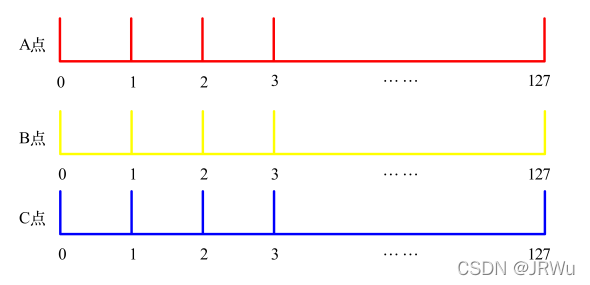
�ֱ��ģ��ͼ(�ο�ͼ,reference image)��ʵʱͼ(�۲�ͼ,observation image)�����ؼ��������Ӽ��ϡ�Ŀ���ʶ����ͨ�����㼯�ڹؼ��������ӵıȶ�����ɡ�����128ά�Ĺؼ��������ӵ������Զ�������ŷʽ���롣
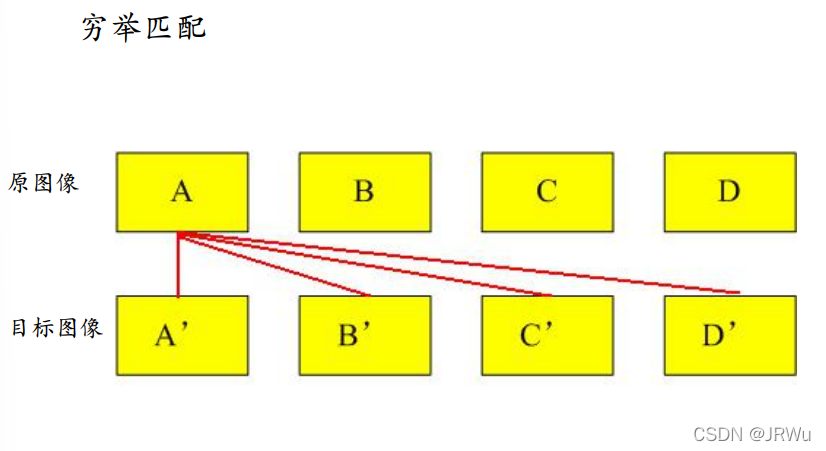
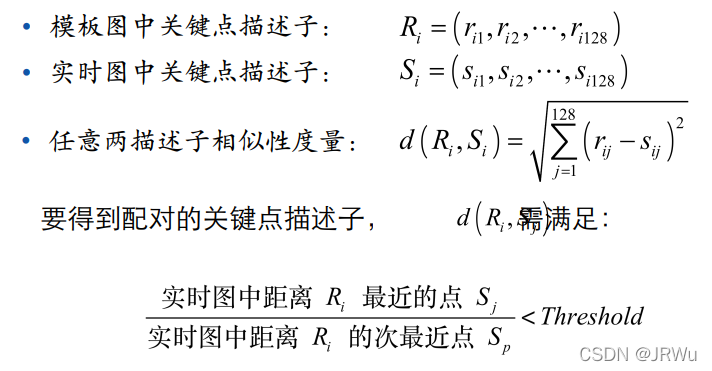
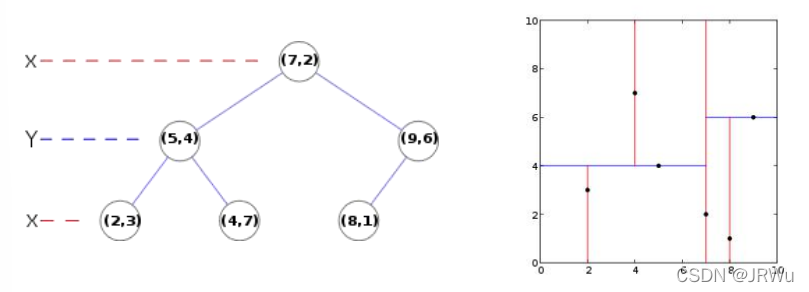
�ؼ����ƥ����Բ�����ٷ������,���������ķѵ�ʱ��̫��,һ�㶼����kd�������ݽṹ�������������������������Ŀ��ͼ��Ĺؼ���Ϊ��,������Ŀ��ͼ������������ڽ���ԭͼ��������ʹ��ڽ���ԭͼ�������㡣
Kd����һ��ƽ���������
2.4. ����ʵ��
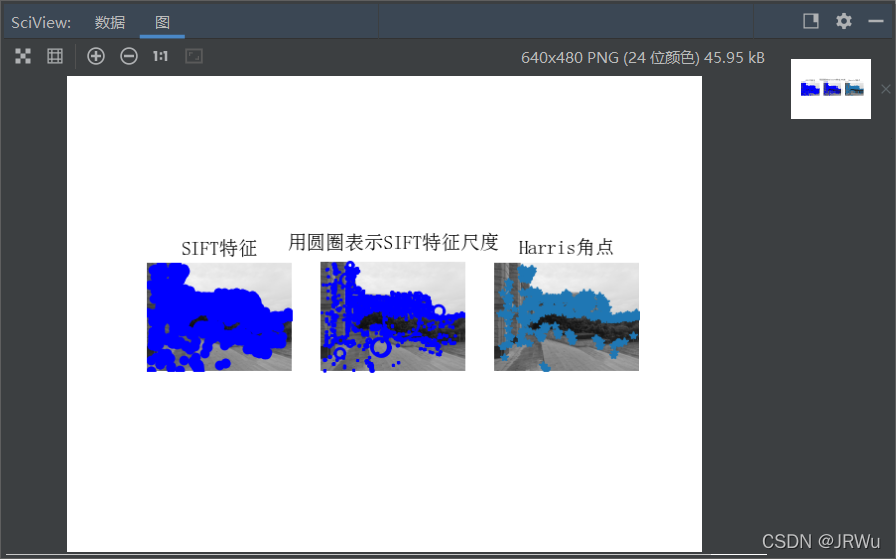
(1)������Ȥ��
��������:
#SIFT������Ȥ��
from PIL import Image
from pylab import *
from PCV.localdescriptors import sift
from PCV.localdescriptors import harris
# ������������֧��
from matplotlib.font_manager import FontProperties
font = FontProperties(fname=r"c:\windows\fonts\SimSun.ttc", size=14)
imname = '3.jpg'
im = array(Image.open(imname).convert('L'))
sift.process_image(imname, 'empire.sift')
l1, d1 = sift.read_features_from_file('empire.sift')
figure()
gray()
subplot(131)
sift.plot_features(im, l1, circle=False)
title(u'SIFT����',fontproperties=font)
subplot(132)
sift.plot_features(im, l1, circle=True)
title(u'��ԲȦ��ʾSIFT�����߶�',fontproperties=font)
# ���harris�ǵ�
harrisim = harris.compute_harris_response(im)
subplot(133)
filtered_coords = harris.get_harris_points(harrisim, 6, 0.1)
imshow(im)
plot([p[1] for p in filtered_coords], [p[0] for p in filtered_coords], '*')
axis('off')
title(u'Harris�ǵ�',fontproperties=font)
show()
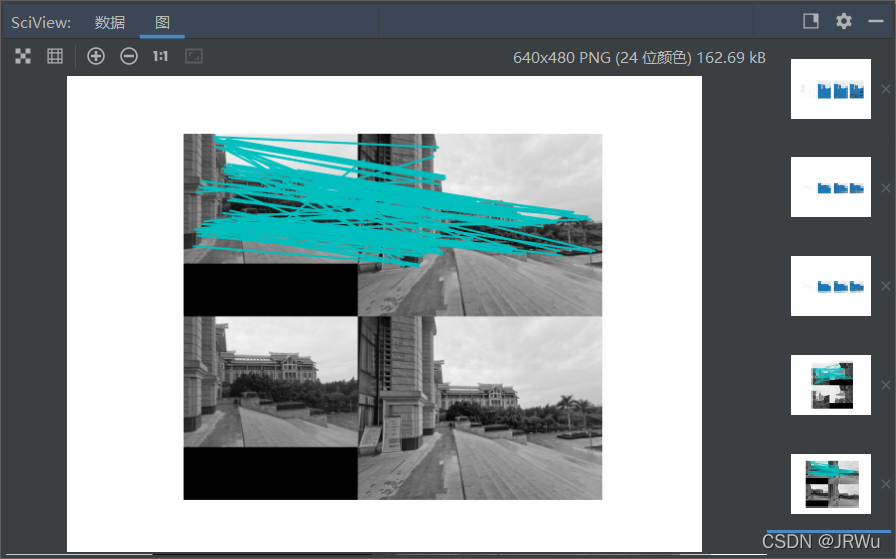
(2)������ƥ��
#������ƥ��
from PIL import Image
from pylab import *
import sys
from PCV.localdescriptors import sift
im1f = '7.jpg'
im2f = '8.jpg'
im1 = array(Image.open(im1f))
im2 = array(Image.open(im2f))
#sift.process_image(im1f, 'out_sift_1.txt')
l1, d1 = sift.read_features_from_file('out_sift_1.txt')
figure()
gray()
subplot(121)
sift.plot_features(im1, l1, circle=False)
#sift.process_image(im2f, 'out_sift_2.txt')
l2, d2 = sift.read_features_from_file('out_sift_2.txt')
subplot(122)
sift.plot_features(im2, l2, circle=False)
#matches = sift.match(d1, d2)
matches = sift.match_twosided(d1, d2)
print('{} matches'.format(len(matches.nonzero()[0])))
figure()
gray()
sift.plot_matches(im1, im2, l1, l2, matches, show_below=True)
show()