python,c矩阵求逆问题记录
前言
记录下自己在做相机矫正遇到的问题,详细说下就是np.linalg.inv(M) 和cv2.invert(M)[1]的结果居然不一样。
正文
现象
首先np.linalg.inv和cv2.invert都是求矩阵的逆,而且要求该矩阵为方阵(行数和列数相同)。
我们先看这个矩阵
import numpy as np
import cv2
M1 = np.array([[800.0, 0, 270],
[ 0, 820, 223 ],
[ 0, 0, 1 ]])
M1_invnp=np.linalg.inv(M1)
M1_invcv=cv2.invert(M1)[1]
print(M1_invnp)
print(M1_invcv)
结果如图
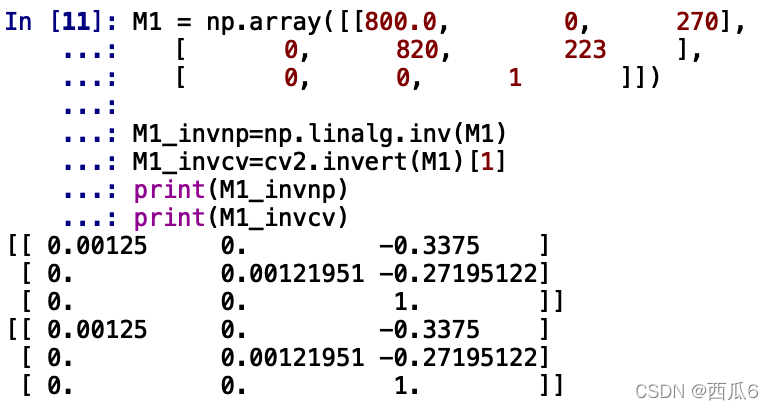
两个结果是相等的。
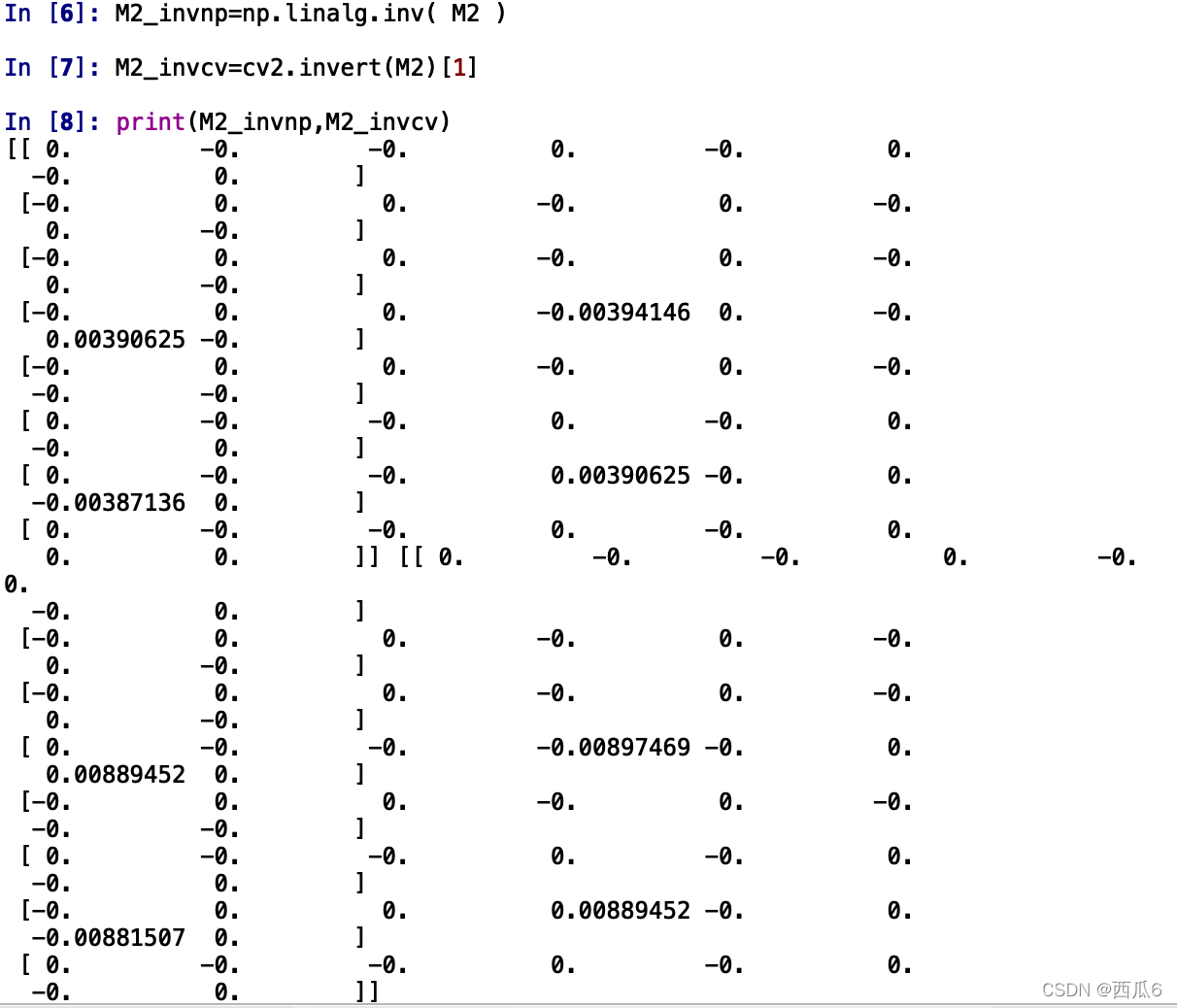
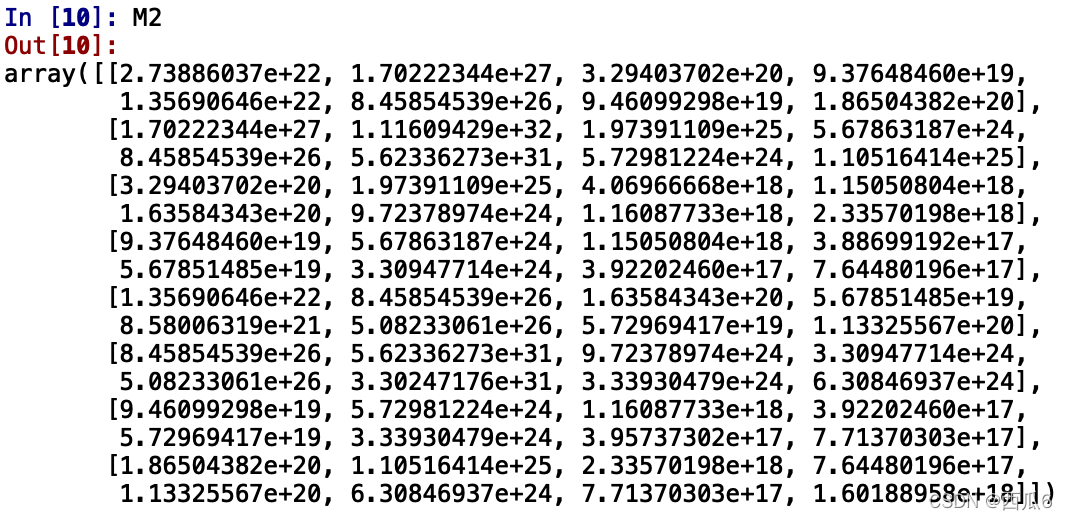
但是如果换另一个矩阵。结果不一样了。M2没法单独写出,所以只能截图说明了。
其中的M2值为
优化思路
实际我把得到的逆矩阵乘回去,发现M2_invnp的结果比M2_invcv的结果好,也就是说np.linalg.inv优于使用默认的cv2.invert。
(这里注意是使用默认的)
后来使用cv2.invert(M1,1)[1],cv2.invert(M1,2)[1],cv2.invert(M1,3)[1]。得到的值也不同。最麻烦的是,我很难确定哪个值更好。
所以我想,那是不是有别的求逆方法呢。
最终方案
因为最后项目是要用c写在机器里,所以最终我同时用了三种库的求逆方法。
1.opencv 库的(cv::invert(dl_dlt,inv_dl_dlt,0);)
opencv后面的数字我用了0到3的全部4种
2.Eigen库的 (Eigen::Matrix<double, 8, 8> R_matrix_inv=R_matrix.inverse();)
3.numcpp库的(nc::NdArray Ncdl_dlt_inv=nc::linalg::inv(Ncdl_dlt);)
这样我就求出了4+1+1=6种方法。个人感觉,numcpp和opencv 参数为1,2的时候,结果会感觉更好些。
所以我个人是选择了numcpp的方法。不过关于速度和性能,自己就没有验证了。
结束语
关于这个矩阵求逆,我觉得有很多值得探讨的空间。你要是有什么疑惑,欢迎评论或者私聊我。
之后我也会把自己Mat,Eigen::Matrix,nc::NdArray这三种自己用的矩阵互转方法写出来,方便各位使用。
嘿嘿,有帮助就点个赞和关注咯。感谢各位。
