提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
提示:以下是本篇文章正文内容,下面案例可供参考
一、Ubuntu的双显卡设置
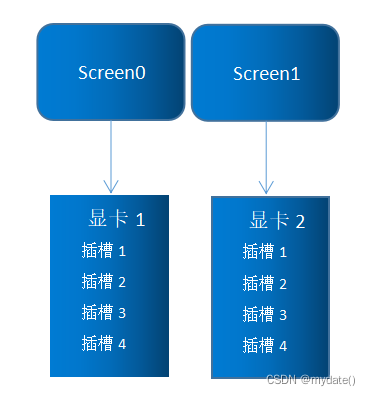
1)我这里介绍的是使用两张显卡去处理这2个fisheye,因此显卡会有些特殊配置,包括分辨率,下图就是我想去实现的概况;
2)通过nvidia-setting将下面显卡和Screen绑定起来,因为VTD需要通过绑定Screen,并将IG分配到对应的显卡上;
3)显示器配置(配置多个显示器1920x1280 30HZ的视频输出):
打开/etc/X11/xorg.conf,需要配置2个Screen,2个monitor,2个Device,并且需要通过AW EDID Editor的方式修改每个屏幕的分辨率(可以使用xrandr命令修改分辨率,我尝试是失败的),具体配置如下所示:?
Section "ServerLayout"
? ? Identifier ? ? "Layout0"
? ? Screen ? ? ?0 ?"Screen0" 0 0
? ? Screen ? ? ?1 ?"Screen1" 1280 0
? ? InputDevice ? ?"Keyboard0" "CoreKeyboard"
? ? InputDevice ? ?"Mouse0" "CorePointer"
? ? Option ? ? ? ? "Xinerama" "0"
EndSection
Section "Monitor"
? ? Identifier ? ? "Monitor0"
? ? VendorName ? ? "Unknown"
? ? ModelName ? ? ?"DELL D2720DS"
? ? HorizSync ? ? ? 30.0 - 88.0
? ? VertRefresh ? ? 50.0 - 76.0
? ? Option ? ? ? ? "DPMS"
EndSection
Section "Monitor"
? ? Identifier ? ? "Monitor1"
? ? VendorName ? ? "Unknown"
? ? ModelName ? ? ?"DELL D2720DS"
? ? HorizSync ? ? ? 30.0 - 88.0
? ? VertRefresh ? ? 50.0 - 76.0
? ? Option ? ? ? ? "DPMS"
EndSection
Section "Device"
? ? Identifier ? ? "Device0"
? ? Driver ? ? ? ? "nvidia"
? ? VendorName ? ? "NVIDIA Corporation"
? ? BoardName ? ? ?"NVIDIA GeForce RTX 3080"
? ? BusID ? ? ? ? ?"PCI:115:0:0"
EndSection
Section "Device"
? ? Identifier ? ? "Device1"
? ? Driver ? ? ? ? "nvidia"
? ? VendorName ? ? "NVIDIA Corporation"
? ? BoardName ? ? ?"NVIDIA GeForce RTX 3080"
? ? BusID ? ? ? ? ?"PCI:213:0:0"
EndSection
Section "Screen"
? ? Identifier ? ? "Screen0"
? ? Device ? ? ? ? "Device0"
? ? Monitor ? ? ? ?"Monitor0"
? ? DefaultDepth ? ?24
? ? Option ? ? ? ? "CustomEDID" "GPU-0.DP-0:/home/ubunutuds/Desktop/edid_19201280_30.bin;GPU-0.DP-2:/home/ubunutuds/Desktop/edid_19201280_30.bin;GPU-0.DP-3:/home/ubunutuds/Desktop/edid_19201280_30.bin;GPU-0.DP-4:/home/ubunutuds/Desktop/edid_19201280_30.bin" ?//这部分修改对应显示屏的分辨率,.bin文件是通过AW EDID Editor进行编辑的,自己使用的显示屏没有修改;
? ? Option ? ? ? ? "Stereo" "0"
? ? Option ? ? ? ? "nvidiaXineramaInfoOrder" "DFP-0"
? ? Option ? ? ? ? "metamodes" "nvidia-auto-select +0+0"
? ? Option ? ? ? ? "SLI" "Off"
? ? Option ? ? ? ? "MultiGPU" "Off"
? ? Option ? ? ? ? "BaseMosaic" "off"
? ? SubSection ? ? "Display"
? ? ? ? Depth ? ? ? 24
? ? EndSubSection
EndSection
Section "Screen"
? ? Identifier ? ? "Screen1"
? ? Device ? ? ? ? "Device1"
? ? Monitor ? ? ? ?"Monitor1"
? ? DefaultDepth ? ?24
? ? Option ? ? ?"CustomEDID" "GPU-1.HDMI-0:/home/ubunutuds/Desktop/edid_19201280_30.bin;GPU-1.DP-0:/home/ubunutuds/Desktop/edid_19201280_30.bin;GPU-1.DP-2:/home/ubunutuds/Desktop/edid_19201280_30.bin;GPU-1.DP-3:/home/ubunutuds/Desktop/edid_19201280_30.bin;GPU-1.DP-4:/home/ubunutuds/Desktop/edid_19201280_30.bin" //这部分修改对应显示屏的分辨率,.bin文件是通过AW EDID Editor进行编辑的,可以网上搜索教程;
? ? #Option ? ? ? ? "nvidiaXineramaInfoOrder" "DFP-1"
? ? Option ? ? ? ? "Stereo" "0"
? ? Option ? ? ? ? "nvidiaXineramaInfoOrder" "DFP-1"
? ? Option ? ? ? ? "metamodes" "DP-0: nvidia-auto-select +0+0, DP-2: nvidia-auto-select +1920+0"
? ? Option ? ? ? ? "SLI" "Off"
? ? Option ? ? ? ? "MultiGPU" "Off"
? ? Option ? ? ? ? "BaseMosaic" "off"
? ? SubSection ? ? "Display"
? ? ? ? Depth ? ? ? 24
? ? EndSubSection
EndSection
注意:配置完成后显卡2没有视屏输出,黑屏属于正常现象,不影响IG画面的显示;
二、双Fisheyes的配置过程
1)VTD中各文件的依赖关系:
配置2个IG,Simserver.xml,AutoCfg.xml,AutoCfgDisplay.xml,IGbase,之间的依赖关系是:

重要:由于鱼眼摄像头是需要畸变的,所以我们需要通过lensDistortion工具配置畸变表、分辨率、像素点大小、焦距、FOV角度等参数生成对应的AutoCfgDisplay.xml、IGbase、.dat畸变插件等配置文件,而实现摄像头以畸变的状态显示在IG上(lensDistortion工具是跟VTD拿的)。
注意:.dat文件需要放置在~Date/Setups/Project_name/ImageGenerator中;
3)Simserver需要做什么?
①复制2个IG的Process,并修改该对应的name和cmdline的参数,1个IG对应一个Process,如下图所示,更改红色部分。
代码如下(示例):
<Process
? ? ? ? group="igGroup"
? ? ? ? name="igCtr1" ?
? ? ? ? auto="false"
? ? ? ? explicitLoad="false"
? ? ? ? path="$VI_CORE_DIR/ImageGenerator/bin"
? ? ? ? executable="vigcar"
? ? ? ? cmdline="$VI_CURRENT_SETUP/Config/ImageGenerator/AutoCfg1.xml -m 0x01"?
? ? ? ? useXterm="true"
? ? ? ? xtermOptions="-fg Black -bg LightGoldenRod -geometry 80x10+508+163"
? ? ? ? affinitymask="0xFF"
? ? ? ? schedPolicy="SCHED_RR"
? ? ? ? schedPriority="20"
? ? ? ? workDir="$VI_CURRENT_SETUP/Bin">
? ? ? ? <EnvVar name="LD_LIBRARY_PATH" val="$VI_CORE_DIR/ImageGenerator/bin:$VI_CORE_DIR/ImageGenerator/lib"/>?
? ? ? </Process>
<Process
? ? ? ? group="igGroup"
? ? ? ? name="igCtr2" ?
? ? ? ? auto="false"
? ? ? ? explicitLoad="false"
? ? ? ? path="$VI_CORE_DIR/ImageGenerator/bin"
? ? ? ? executable="vigcar"
? ? ? ? cmdline="$VI_CURRENT_SETUP/Config/ImageGenerator/AutoCfg2.xml -m 0x01"?
? ? ? ? useXterm="true"
? ? ? ? xtermOptions="-fg Black -bg LightGoldenRod -geometry 80x10+508+163"
? ? ? ? affinitymask="0xFF"
? ? ? ? schedPolicy="SCHED_RR"
? ? ? ? schedPriority="20"
? ? ? ? workDir="$VI_CURRENT_SETUP/Bin">
? ? ? ? <EnvVar name="LD_LIBRARY_PATH" val="$VI_CORE_DIR/ImageGenerator/bin:$VI_CORE_DIR/ImageGenerator/lib"/>?
? ? ? </Process>
4)AutoCfg.xml需要做什么?
①找到对应Project文件夹中的 ~Data/Setups/Project_name/ImageGenerator/AutoCfg.xml,复制2个IG所需要的副本文件AutoCfg1.xml,AutoCfg2.xml。
②修改AutoCfg1.xml文件中的下述红色部分:
<IGconfig>
? <Includes>
? ? <Include file="IGLinks/Setup/Config/ImageGenerator/TopViewShadows.xml" />
? ? <Include file="IGLinks/Setup/Config/ImageGenerator/IGbase1.xml" />
? ? <Include file="IGLinks/Vig/data/Sky/HighContrastSky.xml" />
? ? <Include file="IGLinks/Distro/Config/ImageGenerator/MaterialsHCS.xml" />
? ? <Include file="IGLinks/Distro/Config/ImageGenerator/SymbolsStd.xml" />
? ? <Include file="IGLinks/Distro/Config/ImageGenerator/LightSrcStd.xml" />
? ? <Include file="IGLinks/Setup/Config/ImageGenerator/AutoCfgDisplay1.xml" />
? ? <Include file="IGLinks/Setup/Config/ImageGenerator/AutoCfgDatabase.xml" />
? </Includes>
</IGconfig>
③修改AutoCfg2.xml文件中的下述红色部分:
<IGconfig>
? <Includes>
? ? <Include file="IGLinks/Setup/Config/ImageGenerator/TopViewShadows.xml" />
? ? <Include file="IGLinks/Setup/Config/ImageGenerator/IGbase2.xml" />
? ? <Include file="IGLinks/Vig/data/Sky/HighContrastSky.xml" />
? ? <Include file="IGLinks/Distro/Config/ImageGenerator/MaterialsHCS.xml" />
? ? <Include file="IGLinks/Distro/Config/ImageGenerator/SymbolsStd.xml" />
? ? <Include file="IGLinks/Distro/Config/ImageGenerator/LightSrcStd.xml" />
? ? <Include file="IGLinks/Setup/Config/ImageGenerator/AutoCfgDisplay2.xml" />
? ? <Include file="IGLinks/Setup/Config/ImageGenerator/AutoCfgDatabase.xml" />
? </Includes>
</IGconfig>
5)AutoCfgDisplay.xml需要做什么?
①复制lensDistortion工具生成的AutoCfgDisplay.xml 文件到Project文件夹中的 ~Data/Setups/Project_name/ImageGenerator路径,建立2个IG所需要的副本文件AutoCfgDisplay1.xml,AutoCfgDisplay2.xml。
②配置对应的drawThreadCPUAffinity和 appCullThreadCPUAffinity到不同的CPU上,用于资源合理分配(命令窗口输入top,再按1,可以看到不同CPU的状态)
③配置IG到不同的Screen上;
④配置对应的鱼眼摄像头到不同的车辆安装位置;
③修改AutoCfgDisplay1.xml文件中的下述红色部分:
<IGconfig>
? <SystemConfig>
?<Graphics smallFeatureCullPixelSize="3.9" ?lodscale="0.9" gamma="1 1 1" ?
? ? ? ? ? ? ? ?enableCursor="1" enableDatabasePagerThread="0"?
? ? ? ? ? ? ? ?drawThreadCPUAffinity="2" appCullThreadCPUAffinity="1" ?//递增数字即可,一般不用CPU0;?
? ? ? ? ? ? ? ?enableTransparencyAntialiasing="1" enableMultisampling="1"?
? ? ? ? ? ? ? ?schedulerStabilization="1" configurationProfile="HIGH_CONTRAST"?
? ? ? ? ? ? ? ?isLocalLightingSupportEnabled="1"?
threadingModel="CullThreadPerCameraDrawThreadPerContext"
?targetFramerate="60">
<RenderSurface name="Fisheye" x="0" y="0" width="1280" height="960" ?//name要和renderSurface中的一致;
? ? ? ? ? ? ? ?depthBits="24" stencilBits="1" sampleBuffers="0"?
? ? ? ? ? ? ? ?samples="0" borderVisible="1" overrideRedirect="0"?
? ? ? ? ? ? ? ?displayNum="0" screenNum="0" pbuffer="0"/> ? ? ? ?//由于IG1显示在显卡0,因此配置到screenNum0上即可,displayNum按照Nvidia-settings→X Screen 0中的设置填写;
?<Camera name="cam1" renderSurface="Fisheye" viewPortX="0" viewPortY="0"?
? ? ? ? ? ? ? viewPortWidth="1280" viewPortHeight="960">
?<SymmetricPerspectiveAngles fovX="210" fovY="210" near="1" far="1000"?
? ? ? ? ? ? ? offsetHPR="180 -25.59 0" offsetXYZ="0 -3.804 0.874"/> ? //自定义修改该镜头的安装参数;
? ? ? ?</Camera>
? ? ?</Graphics>
? ?</SystemConfig>
</IGconfig>
③修改AutoCfgDisplay2.xml文件中的下述红色部分:
<IGconfig>
? <SystemConfig>
?<Graphics smallFeatureCullPixelSize="3.9" ?lodscale="0.9" gamma="1 1 1" ?
? ? ? ? ? ? ? ?enableCursor="1" enableDatabasePagerThread="0"?
? ? ? ? ? ? ? ?drawThreadCPUAffinity="4" appCullThreadCPUAffinity="3" ?//递增数字即可,一般不用CPU0;?
? ? ? ? ? ? ? ?enableTransparencyAntialiasing="1" enableMultisampling="1"?
? ? ? ? ? ? ? ?schedulerStabilization="1" configurationProfile="HIGH_CONTRAST"?
? ? ? ? ? ? ? ?isLocalLightingSupportEnabled="1"?
threadingModel="CullThreadPerCameraDrawThreadPerContext"
?targetFramerate="60">
<RenderSurface name="Fisheye2" x="0" y="0" width="1280" height="960" ?//name要和renderSurface中的一致;
? ? ? ? ? ? ? ?depthBits="24" stencilBits="1" sampleBuffers="0"?
? ? ? ? ? ? ? ?samples="0" borderVisible="1" overrideRedirect="0"?
? ? ? ? ? ? ? ?displayNum="0" screenNum="1" pbuffer="0"/> ? ? ? ?//由于IG1显示在显卡0,因此配置到screenNum0上即可,displayNum按照Nvidia-settings→X Screen 0中的设置填写;
?<Camera name="cam2" renderSurface="Fisheye2" viewPortX="0" viewPortY="0"?
? ? ? ? ? ? ? viewPortWidth="1280" viewPortHeight="960">
?<SymmetricPerspectiveAngles fovX="210" fovY="210" near="1" far="1000"?
? ? ? ? ? ? ? offsetHPR="180 -25.59 0" offsetXYZ="0 -3.804 0.874"/> ? //自定义修改该镜头的安装参数;
? ? ? ?</Camera>
? ? ?</Graphics>
? ?</SystemConfig>
</IGconfig>
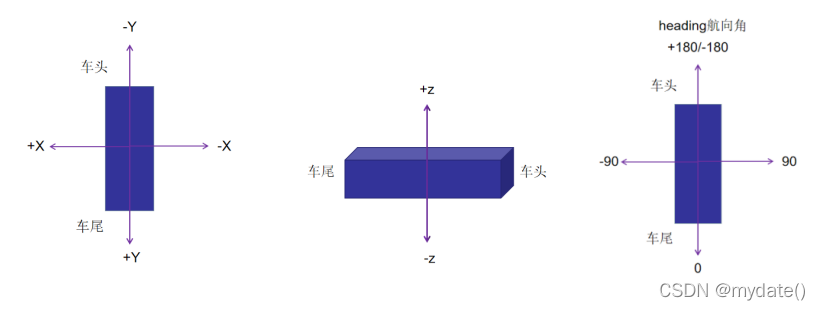
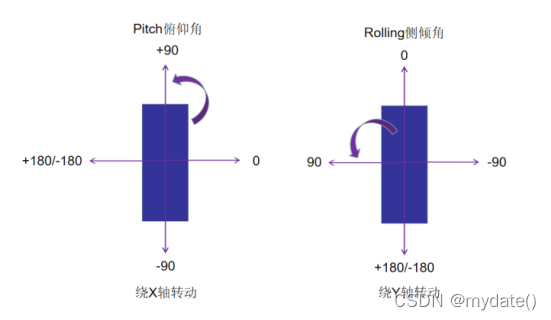
安装镜头时需要参考坐标系,原点是车辆后轴中心:
?6)IGbase需要做什么?
①复制lensDistortion工具生成的IGbase.xml到对应Project文件夹中 ~Data/Setups/Project_name/ImageGenerator/,建立2个IG所需要的副本文件IGbase1.xml,IGbase2.xml。
②修改IGbase1中的RDBInterface、PostProcessingPipelineConfigurator部分:
RDBInterface:
<RDBInterface name="MyRDBInterfaceCam1" printDebugInfo="0" ignoreShmFlags="0">
<ShmLayoutImage key="0x08130" />
</RDBInterface> //配置独立的name,key,用于摄像头数据读取;PostProcessingPipelineConfigurator:
<PostProcessingPipelineConfigurator name="OriginalSceneConfiguratorCam1" >
<Pipeline hideSceneFromDefaultView="1" viewName="cam1">TAKATA:
connectImageTransferTCP="0" //多个IG即使显存足够也会出现屏幕渲染帧率低,因此需要设置0;?
②修改IGbase2中的RDBInterface、PostProcessingPipelineConfigurator部分:
RDBInterface:
<RDBInterface name="MyRDBInterfaceCam2" printDebugInfo="0" ignoreShmFlags="0">
<ShmLayoutImage key="0x08130" />
</RDBInterface> //配置独立的name,key,用于摄像头数据读取;PostProcessingPipelineConfigurator:
<PostProcessingPipelineConfigurator name="OriginalSceneConfiguratorCam2" >
<Pipeline hideSceneFromDefaultView="1" viewName="cam2">TAKATA:
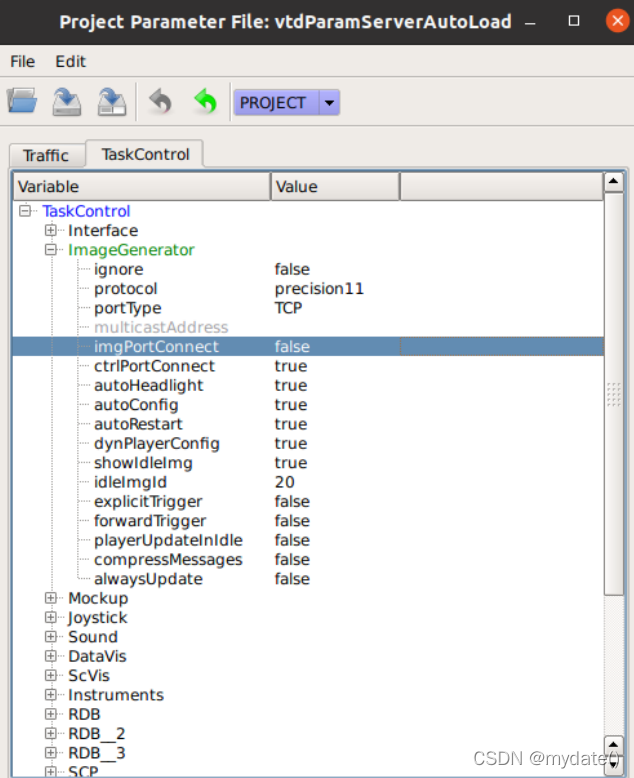
connectImageTransferTCP="0" //多个IG即使显存足够也会出现屏幕渲染帧率低,因此需要设置0;7)修改GUI中的Setup:
imgPortConnect设置成false;
?完成设置,点击运行看看效果;
三、Fisheyes效果图
