1.前言
????????标定,是机器视觉系统的准备工作。
2.原理
????????在机器视觉系统中存在三个坐标系:
(1)机器人坐标系?
(2)相机坐标系
(3)世界坐标系
????????标定的意义,就是将机器人坐标系和相机坐标系建立联系。通过九点标定的方式,可将这种联系量化成数学表达式。


?
3.代码
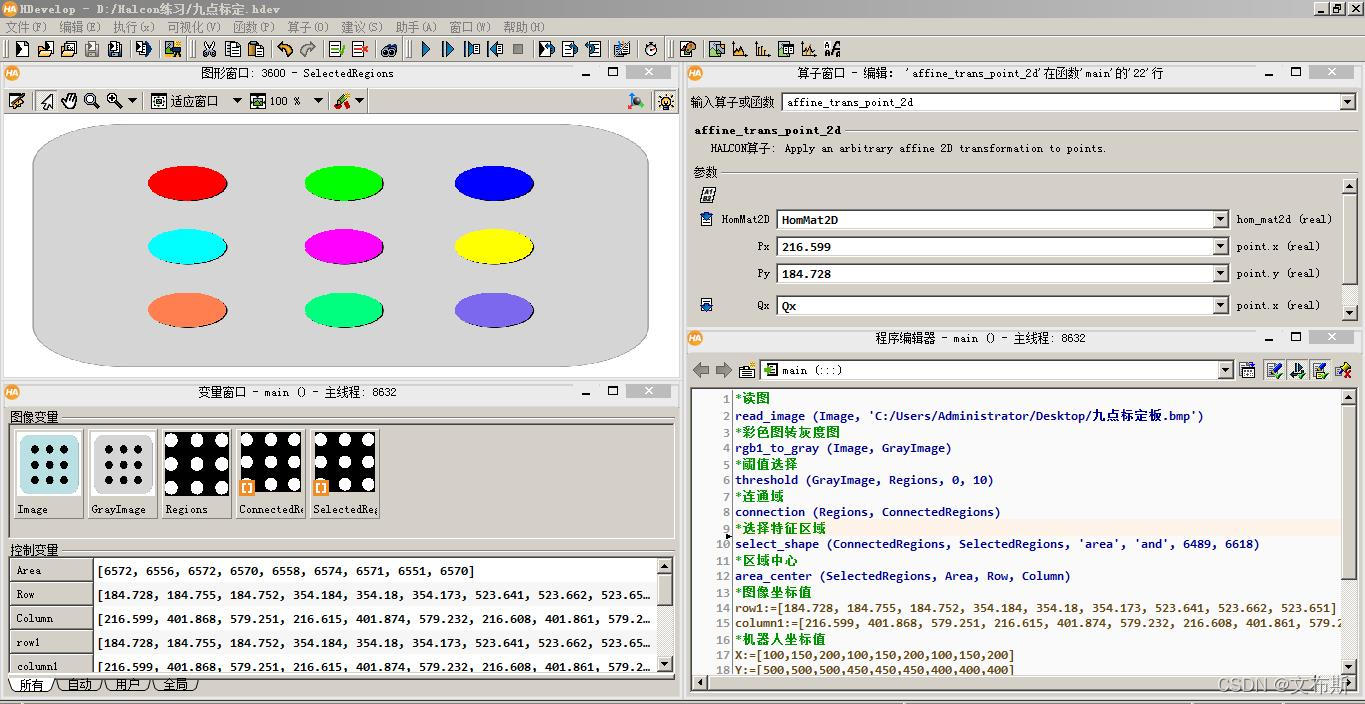
*读图
read_image (Image, 'C:/Users/Administrator/Desktop/九点标定板.bmp')
*彩色图转灰度图
rgb1_to_gray (Image, GrayImage)
*阈值选择
threshold (GrayImage, Regions, 0, 10)
*连通域
connection (Regions, ConnectedRegions)
*选择特征区域
select_shape (ConnectedRegions, SelectedRegions, 'area', 'and', 6489, 6618)
*区域中心
area_center (SelectedRegions, Area, Row, Column)
*图像坐标值
row1:=[184.728, 184.755, 184.752, 354.184, 354.18, 354.173, 523.641, 523.662, 523.651]
column1:=[216.599, 401.868, 579.251, 216.615, 401.874, 579.232, 216.608, 401.861, 579.273]
*机器人坐标值
X:=[100,150,200,100,150,200,100,150,200]
Y:=[500,500,500,450,450,450,400,400,400]
*计算矢量关系式
vector_to_hom_mat2d (row1, column1, X, Y, HomMat2D)
*仿射变换测试
affine_trans_point_2d (HomMat2D, 216.599, 184.728, Qx, Qy)
?4.缩略图
?
5.总结
? ? ? ? 标定,使Halcon视觉系统精度更高!

