时间序列回归模型–潘登同学的计量经济学笔记
文章目录
时间序列数据
核心理解: 时间序列数据是一个标有时间序列下标的随机变量序列,也就是随机过程
当我们搜集到一个时间序列数据时,我们便得到该随机过程的一个可能结果或实现, 我们只能看到一个实现,因为我们不能让时间倒转重新开始这个过程。如果特定的历史条件有所不同,我们通常会得到这个随机过程的另一种不同实现,这就是随机过程的含义。
时间序列回归模型
静态模型(static model)
y
t
=
β
0
+
β
1
x
t
+
u
t
y_t = \beta_0 + \beta_1 x_t + u_t
yt?=β0?+β1?xt?+ut?
‘静态模型’源于在设定模型时,
y
y
y与
z
z
z同期的事实。若认为
z
z
z在时间
t
t
t的一个变化对
y
y
y有直接影响,
△
y
t
=
β
1
△
x
t
\triangle y_t = \beta_1 \triangle x_t
△yt?=β1?△xt?,就可以假设一个静态模型…
有限分布滞后项模型(finite distributed lag model)
y t = α 0 + δ 0 z t + δ 1 z t ? 1 + δ 2 z t ? 2 + u t y_t = \alpha_0 + \delta_0 z_t + \delta_1 z_{t-1} + \delta_2 z_{t-2} + u_t yt?=α0?+δ0?zt?+δ1?zt?1?+δ2?zt?2?+ut?
冲击倾向
这是一个二阶的FDL,为了理解系数的作用,举个栗子
| … \ldots … | t ? 2 t-2 t?2 | t ? 1 t-1 t?1 | t t t | t + 1 t+1 t+1 | t + 2 t+2 t+2 | … \ldots … | |
|---|---|---|---|---|---|---|---|
| z | c | c | c | c + 1 c+1 c+1 | c | c | c |
那么根据模型,可以写出下式(假设误差为0)
y
t
?
1
=
α
0
+
δ
0
c
+
δ
1
c
+
δ
2
c
y
t
=
α
0
+
δ
0
(
c
+
1
)
+
δ
1
c
+
δ
2
c
y
t
+
1
=
α
0
+
δ
0
c
+
δ
1
(
c
+
1
)
+
δ
2
c
y
t
+
2
=
α
0
+
δ
0
c
+
δ
1
c
+
δ
2
(
c
+
1
)
y
t
+
3
=
α
0
+
δ
0
c
+
δ
1
c
+
δ
2
c
y_{t-1} = \alpha_0 + \delta_0 c + \delta_1 c + \delta_2 c \\ y_{t} = \alpha_0 + \delta_0 (c+1) + \delta_1 c + \delta_2 c \\ y_{t+1} = \alpha_0 + \delta_0 c + \delta_1 (c+1) + \delta_2 c \\ y_{t+2} = \alpha_0 + \delta_0 c + \delta_1 c + \delta_2 (c+1) \\ y_{t+3} = \alpha_0 + \delta_0 c + \delta_1 c + \delta_2 c \\
yt?1?=α0?+δ0?c+δ1?c+δ2?cyt?=α0?+δ0?(c+1)+δ1?c+δ2?cyt+1?=α0?+δ0?c+δ1?(c+1)+δ2?cyt+2?=α0?+δ0?c+δ1?c+δ2?(c+1)yt+3?=α0?+δ0?c+δ1?c+δ2?c
根据前两个方程,得到 y t ? y t ? 1 = δ 0 y_t-y_{t-1}=\delta_0 yt??yt?1?=δ0?,表明 δ 0 \delta_0 δ0?是 z z z在 t t t时期提高一个单位所引起 y y y的即期变化, δ 0 \delta_0 δ0?通常被称作冲击倾向(impact propensity)或冲击乘数(impact multiplier).
类似地, δ 1 = y t + 1 ? y t ? 1 \delta_1 = y_{t+1} - y_{t-1} δ1?=yt+1??yt?1?这个是即期变化发生后,下一期 y y y的变化, δ 2 = y t + 2 ? y t ? 1 \delta_2 = y_{t+2} - y_{t-1} δ2?=yt+2??yt?1?这个是,而在 t + 3 t+3 t+3期, y y y回到了初始水平,这是因为我们只假定了 z z z中只有两期滞后。
如果将 δ j \delta_j δj?作为 j j j的函数作图,变得到滞后分布(lag distribution)
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-P6VvUxWR-1649407145508)(滞后分布.png)]
上图意味着,最大的影响发生在第一期滞后;滞后分布的含义是: 如果我们把 y y y的初始值标准化为0,这个滞后分布就描绘出 z z z暂时提高一个单位所导致 y y y的随后所有取值
长期倾向
当
z
z
z永久提高所导致的
y
y
y的变化同样重要,根据模型我们可以写出下式
y
t
?
1
=
α
0
+
δ
0
c
+
δ
1
c
+
δ
2
c
y
t
=
α
0
+
δ
0
(
c
+
1
)
+
δ
1
c
+
δ
2
c
y
t
+
1
=
α
0
+
δ
0
(
c
+
1
)
+
δ
1
(
c
+
1
)
+
δ
2
c
y
t
+
2
=
α
0
+
δ
0
(
c
+
1
)
+
δ
1
(
c
+
1
)
+
δ
2
(
c
+
1
)
y_{t-1} = \alpha_0 + \delta_0 c + \delta_1 c + \delta_2 c \\ y_{t} = \alpha_0 + \delta_0 (c+1) + \delta_1 c + \delta_2 c \\ y_{t+1} = \alpha_0 + \delta_0 (c+1) + \delta_1 (c+1) + \delta_2 c \\ y_{t+2} = \alpha_0 + \delta_0 (c+1) + \delta_1 (c+1) + \delta_2 (c+1) \\
yt?1?=α0?+δ0?c+δ1?c+δ2?cyt?=α0?+δ0?(c+1)+δ1?c+δ2?cyt+1?=α0?+δ0?(c+1)+δ1?(c+1)+δ2?cyt+2?=α0?+δ0?(c+1)+δ1?(c+1)+δ2?(c+1)
随着 z z z从第 t t t期开始永久提高,一期后 y y y提高了 δ 0 + δ 1 \delta_0 + \delta_1 δ0?+δ1?,两期后提高了 δ 0 + δ 1 + δ 2 \delta_0 + \delta_1 + \delta_2 δ0?+δ1?+δ2?,两期以后, y y y没有进一步变化。 z z z的当期及滞后项系数之和 δ 0 + δ 1 + δ 2 \delta_0+\delta_1+\delta_2 δ0?+δ1?+δ2?,等于z的永久性提提高,导致y的长期变化,这被称为长期倾向(long run propensity,LRP)或长期乘数(long-run multiplier)
经典假设下OLS性质
与横截面分析类似, 时间序列回归也要做相关假定, 但假定的内容与横截面回归有些许差异…
TS.1 线性于参数
随机过程
{
(
x
t
1
,
x
t
2
,
…
,
x
t
k
,
y
i
)
:
t
=
0
,
1
,
…
,
n
}
\{(x_{t1},x_{t2},\ldots,x_{tk},y_i):t=0,1,\ldots,n\}
{(xt1?,xt2?,…,xtk?,yi?):t=0,1,…,n}服从线性模型
y
i
=
β
0
+
β
1
x
i
1
+
…
+
β
k
x
i
k
+
u
i
y_i = \beta_0 + \beta_1 x_{i1} + \ldots + \beta_k x_{ik} + u_i
yi?=β0?+β1?xi1?+…+βk?xik?+ui?
其中,
{
u
t
:
t
=
1
,
2
,
…
,
n
}
\{u_t: t=1,2,\ldots,n\}
{ut?:t=1,2,…,n}是误差或干扰序列。其中,
n
n
n是观测次数
如果将解释变量 x x x视作矩阵 X t , j X_{t,j} Xt,j?,第 t t t行表示时刻 t t t的横截面数据,第 j j j列则表示变量 j j j在时间上的变化
TS.2 无完全共线性
在样本中,没有任何自变量是恒定不变的,或者是其它自变量的一个完全的线性组合; 该假定允许解释变量之间相关,但是不允许样本中的完全相关。
TS.3 零条件均值
对每一个
t
t
t,给定所有时期的解释变量,误差项
u
i
u_i
ui?的期望值为0
E
(
u
i
∣
X
)
=
0
,
t
=
1
,
2
,
…
,
n
E(u_i|X) = 0 , t=1,2,\ldots,n
E(ui?∣X)=0,t=1,2,…,n
以横截面分析中的说法,从无关性角度来考虑这个假定最为容易。 这个假定意味着, t t t时期的误差项 u i u_i ui?与每个时期的任何解释变量都无关。
回想横截面的零条件均值,其实是TS.3的特例
E
(
u
i
∣
x
t
1
,
…
,
x
t
k
)
=
E
(
u
i
∣
X
t
)
=
0
E(u_i|x_{t1},\ldots,x_{tk}) = E(u_i|X_t) = 0
E(ui?∣xt1?,…,xtk?)=E(ui?∣Xt?)=0
这就是在一个时期中,
u
i
u_i
ui?与同时期的解释变量无关,此时我们称
x
t
j
x_{tj}
xtj?是同期外生的
但TS.3不仅仅要求同期外生性: 即使 s ≠ t s\neq t s?=t, u i u_i ui?也必须与 x s j x_{sj} xsj?无关。此时,我们称解释变量是严格外生的
另外一个重要的方面就是,假定TS.3并没有限制不同时期自变量或 u i u_i ui?的相关性,他只是说, u i u_i ui?的平均值与任何事情的解释变量都不相关。
导致TS.3无效的可能原因
导致TS.3无效的两个可能原因主要是: 遗漏变量和对某些回归元的测量误差。
考虑如下模型:
y
t
=
β
0
+
β
1
z
t
+
u
t
y_t = \beta_0 + \beta_1 z_t + u_t
yt?=β0?+β1?zt?+ut?
假定TS.3不但要求
u
t
和
z
t
u_t和z_t
ut?和zt?不相关,而且要求
u
t
与
z
t
u_t与z_t
ut?与zt?的过去值和将来值都不相关。这有两重含义,
- z 对 y z对y z对y没有滞后影响,如果 z 对 y z对y z对y的确有滞后影响,那就应该估计一个分布滞后模型
- 严格外生性排除了误差项的即期变化,导致 z z z未来变化的可能性,这就有效排除了 y 对 z y对z y对z未来值的反作用
对于上面模型,假如 z t z_t zt?表示农民的劳动投入量, y t y_t yt?表示农作物产量,假定 u t u_t ut?与过去的劳动投入量都无关; 一旦农民根据上一年劳动投入量来决定今年的劳动投入量,那么 u t u_t ut?与 z t + 1 z_{t+1} zt+1?可能就不是无关的,因为大的 u t u_t ut?导致大的 y t y_t yt?进而导致小的 z t + 1 z_{t+1} zt+1?,这种变量就可能不是严格外生的
政策变量,如货币供给的增长、福利开支、高速公路的限速等经常受结果变量过去的影响。在社会科学中,很多解释变量都明显违背严格外生性假定
OLS无偏性
在满足TS.1-3,以
X
X
X为条件,OLS估计量是无偏的,并存在
E
(
β
^
j
)
=
β
j
E(\hat{\beta}_j) = {\beta}_j
E(β^?j?)=βj?
另外两个假定
TS.4 同方差性
以
X
X
X为条件,在所有时期
t
,
u
t
t,u_t
t,ut?的方差都相等:
V
a
r
(
u
t
∣
X
)
=
V
a
r
(
u
t
)
=
σ
1
,
t
=
1
,
2
,
…
,
n
Var(u_t|X) = Var(u_t) = \sigma^1, t=1,2,\ldots,n
Var(ut?∣X)=Var(ut?)=σ1,t=1,2,…,n
TS.5 无序列相关性
以X为条件,任意两个不同时期的误差都不相关:
C
o
r
r
(
u
t
,
u
s
∣
X
)
=
0
,
?
s
≠
t
Corr(u_t,u_s|X) = 0, \forall s\neq t
Corr(ut?,us?∣X)=0,?s?=t
当上式不成立时,就认为误差有序列相关或自相关的问题
OLS的样本方差
在时间序列高斯-马尔科夫假定TS.1到TS.5下,以
X
X
X为条件,
β
^
j
\hat{\beta}_j
β^?j?的条件为方差
V
a
r
(
β
j
^
∣
X
)
=
σ
2
S
S
T
j
(
1
?
R
j
2
)
,
j
=
1
,
2
,
…
,
k
Var(\hat{\beta_j}|X) = \frac{\sigma^2}{SST_j(1-R_j^2)},j=1,2,\ldots,k
Var(βj?^?∣X)=SSTj?(1?Rj2?)σ2?,j=1,2,…,k
其中, S S T j 是 x t j SST_j是x_{tj} SSTj?是xtj?的总平方和(固定 j j j), R j 2 R_j^2 Rj2?是所有其他自变量回归得到的 R 2 R^2 R2
上式方差基本上与在截面数据推导的方差一致,而且导致方差变大的因素(如多重共线性)都与截面数据的结论一致
方差的无偏估计
在TS.1-TS.5下,估计量 σ 2 ^ = S S R d f \hat{\sigma^2} = \frac{SSR}{df} σ2^=dfSSR?是 σ 2 \sigma^2 σ2的一个无偏估计量,其中 d f = n ? k ? 1 df=n-k-1 df=n?k?1
在TS.1-TS.5下,以 X X X为条件,OLS估计量是最优线性无偏估计
经典线性模型假定下的推断
为了能够使用通常的OLS标准误,t统计量和F统计量,我们通常需要增加最后一个假定,他类似于横截面分析中所用的正态性假定
TS.6 正态性
误差 u t u_t ut?独立于 X X X,且具有独立同分布 N ( 0 , σ 2 ) N(0,\sigma^2) N(0,σ2)
TS.7 正态抽样分布
在前6个假定下,以 X X X为条件,OLS估计量遵循正态分布,而且在原假设下,每个t统计量服从t分布,F统计量服从F分布,通常构造的置信区间也是有效的
趋势
在很多情况下,两个时间序列过程表现出相关性,仅仅是因为,由于某些无法观测的因素的作用,二者具有共同的时间趋势而已。如果忽略两个序列按照相同或者相反趋势延伸的事实,会导致错误的结论:认为一个变量的变化由另一个变量的变化导致。
一个能将统计模型描述有趋势行为的简单模型是
y
t
=
α
0
+
α
1
t
+
e
t
y_t = \alpha_0 + \alpha_1 t + e_t
yt?=α0?+α1?t+et?
其中,
{
e
t
}
\{e_t\}
{et?}是一个独立同分布(i.i.d.)的序列,且
E
(
e
t
)
=
0
,
V
a
r
(
e
t
)
=
σ
t
2
E(e_t)=0,Var(e_t)=\sigma_t^2
E(et?)=0,Var(et?)=σt2?。上式形成了一个线性时间趋势,当
△
e
t
=
0
\triangle e_t = 0
△et?=0时,
△
y
t
=
y
t
?
y
t
?
1
=
α
1
\triangle y_t = y_t - y_{t-1} = \alpha_1
△yt?=yt??yt?1?=α1?
若 { e t } \{e_t\} {et?}是一个独立同分布序列,则 { y t } \{y_t\} {yt?}是一个独立(但非同分布)序列。对趋势时间序列更现实的描述是,允许 { e t } \{e_t\} {et?}在不同时期相关,但这并没有改变线性时间趋势的本质。
指数趋势
许多经济时间序列都能用指数趋势来近似,当一个序列在每个时期都具有相同的增长率时,他就具有指数趋势。
时间序列的指数趋势可以通过建立有线性趋势的自然对数模型得到(
y
t
>
0
y_t>0
yt?>0)
log
?
(
y
t
)
=
β
0
+
β
1
t
+
e
t
\log(y_t) = \beta_0 + \beta_1 t + e_t
log(yt?)=β0?+β1?t+et?
将两边取指数后,
y
t
y_t
yt?便表现出指数趋势:
y
t
=
exp
?
(
β
0
+
β
1
t
+
e
t
)
y_t = \exp(\beta_0 + \beta_1 t +e_t)
yt?=exp(β0?+β1?t+et?)
解释
β
1
\beta_1
β1?,对于很小的变化
△
log
?
(
y
t
)
=
log
?
(
y
t
)
?
log
?
(
y
t
?
1
)
\triangle \log(y_t) = \log(y_t) - \log(y_{t-1})
△log(yt?)=log(yt?)?log(yt?1?)近似等于
y
t
y_t
yt?的变化
△
log
?
(
y
t
)
=
y
t
?
y
t
?
1
y
t
?
1
\triangle \log(y_t) = \frac{y_t - y_{t-1}}{y_{t-1}}
△log(yt?)=yt?1?yt??yt?1??
上式的右边,被称作
y
y
y从
t
?
1
t-1
t?1时期到
t
t
t时期的增长率。 设
△
e
t
=
0
\triangle e_t = 0
△et?=0便得到,对所有的
t
t
t
△
log
?
(
y
t
)
=
β
1
\triangle \log(y_t) = \beta_1
△log(yt?)=β1?
也就是说,
β
1
\beta_1
β1?近似等于
y
t
y_t
yt?每期增长率的平均值。
除了线性和指数趋势,还会有更复杂的时间趋势(如:二次时间趋势)
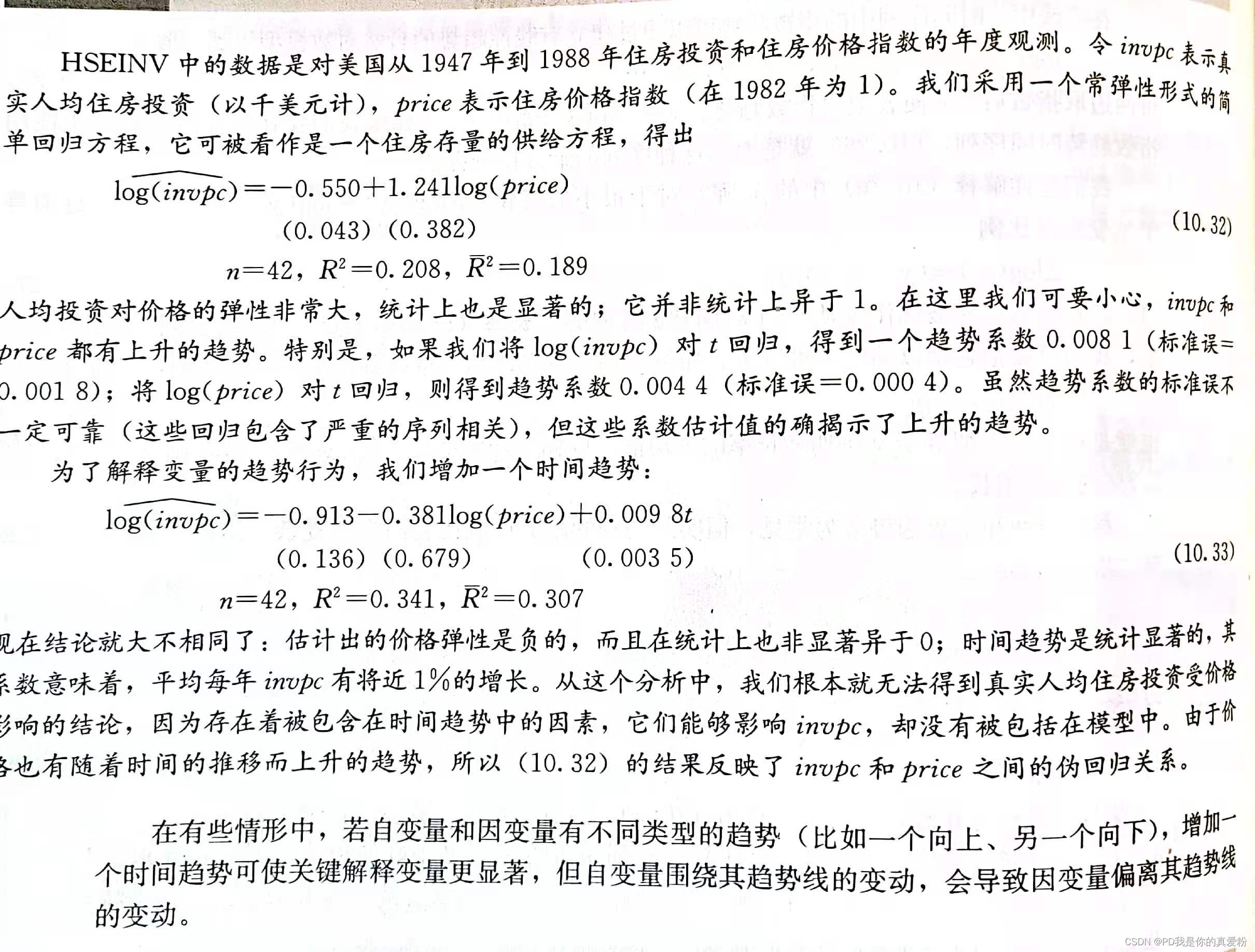
伪回归问题
考虑到某些无法观测的趋势因素影响 y t y_t yt?又有可能与解释变量相关, 如果我们的方程中没有加入时间趋势,我们便可能得到 y t y_t yt?与一个或多个解释变量之间的伪回归问题,仅仅因为每个变量都随着时间的推移而增长。 而解决的方法很简单,只需要将趋势变量放进方程中即可。
除趋势解释
考虑如下回归方程
y
t
^
=
β
0
^
+
β
1
^
x
t
1
+
β
2
^
x
t
2
+
β
3
^
t
\hat{y_t} = \hat{\beta_0} + \hat{\beta_1}x_{t1} + \hat{\beta_2}x_{t2} + \hat{\beta_3}t
yt?^?=β0?^?+β1?^?xt1?+β2?^?xt2?+β3?^?t
具体做法如下:
- 将
y
t
,
x
t
1
,
x
t
2
y_t,x_{t1},x_{t2}
yt?,xt1?,xt2?分别对常数项和时间趋势
t
t
t回归,并记录残差
y
t
¨
,
x
¨
t
1
,
x
¨
t
2
\ddot{y_t},\ddot{x}_{t1},\ddot{x}_{t2}
yt?¨?,x¨t1?,x¨t2?,如:
y t = α 0 ^ + α 1 ^ t + y t ¨ y_t = \hat{\alpha_0} + \hat{\alpha_1}t + \ddot{y_t} yt?=α0?^?+α1?^?t+yt?¨? - 将 y t ¨ 对 x ¨ t 1 , x ¨ t 2 \ddot{y_t}对\ddot{x}_{t1},\ddot{x}_{t2} yt?¨?对x¨t1?,x¨t2?的回归,这个回归得到的碰巧就是原回归方程的 β 1 ^ , β 2 ^ \hat{\beta_1},\hat{\beta_2} β1?^?,β2?^?,这说明了原方程的估计值就是除去了时间趋势的解释,即 x t 1 x_{t1} xt1?变化一单位, y t y_t yt?变化 β 1 ^ \hat{\beta_1} β1?^?单位
如果某个自变量含有趋势,那么,即使 y t y_t yt?不含趋势,在回归中包含趋势项是一个好主意。假若 y t y_t yt?没有明显的趋势,但 x t 1 x_{t1} xt1?可能随时间的推移而上升,那么去掉回归中的趋势变量,即使 x t 1 x_{t1} xt1?沿着其趋势的变动对 y t y_t yt?有影响,看起来也好像 x t 1 对 y t x_{t1}对y_{t} xt1?对yt?没有影响。若在回归中包含 t t t,便能刻画这种影响。
含趋势的 R 2 R^2 R2
时间序列回归中的
R
2
R^2
R2通常很大,特别是与横截面数据的
R
2
R^2
R2相比。这是因为时间序列总是以总量形式出现,而总量数据通常比个人、企业或家庭的数据更容易解释。 但是当因变量含有趋势时,时间序列回归中的普通或调整
R
2
R^2
R2基本关于人为地变大。 根据调整
R
2
R^2
R2
R
2
ˉ
=
1
?
σ
u
2
^
σ
y
2
^
\bar{R^2} = 1 - \frac{\hat{\sigma^2_u}}{{\hat{\sigma^2_y}}}
R2ˉ=1?σy2?^?σu2?^??
其中,
σ
u
2
^
\hat{\sigma^2_u}
σu2?^?是误差方差的无偏估计,
σ
y
^
2
=
∑
=
1
n
(
y
t
?
y
ˉ
)
2
n
?
1
\hat{\sigma_y}^2 = \frac{\sum_{=1}^{n}(y_t - \bar{y})^2}{n-1}
σy?^?2=n?1∑=1n?(yt??yˉ?)2? 在
y
t
y_t
yt?含有趋势时,只要回归中包含了时间趋势,
S
S
T
/
(
n
?
1
)
SST/(n-1)
SST/(n?1)就不再是
V
a
r
(
y
t
)
Var(y_t)
Var(yt?)无偏或一致估计。
S
S
T
/
(
n
?
1
)
SST/(n-1)
SST/(n?1)往往高估了
V
a
r
(
y
t
)
Var(y_t)
Var(yt?),因为他没有解释
y
t
y_t
yt?的趋势
一般的做法是,当因变量含有趋势时,先过滤掉时间趋势对
y
t
y_t
yt?的影响,将
y
t
y_t
yt?对
t
t
t回归,得到残差
y
t
¨
\ddot{y_t}
yt?¨?,然后将
y
t
¨
对
x
t
1
,
x
t
2
,
t
\ddot{y_t}对x_{t1},x_{t2},t
yt?¨?对xt1?,xt2?,t进行回归,该回归的
R
2
R^2
R2是
1
?
S
S
R
∑
t
=
1
n
y
t
¨
2
1 - \frac{SSR}{\sum_{t=1}^n\ddot{y_t}^2}
1?∑t=1n?yt?¨?2SSR?
显然
∑
t
=
1
n
y
t
¨
2
≤
∑
t
=
1
n
(
y
t
?
y
t
ˉ
)
2
\sum_{t=1}^n\ddot{y_t}^2 \leq \sum_{t=1}^n(y_t - \bar{y_t})^2
∑t=1n?yt?¨?2≤∑t=1n?(yt??yt?ˉ?)2,从而得出
R
2
R^2
R2比原本计算的要小。而这个
R
2
R^2
R2能够很好地反映出
x
t
1
与
x
t
2
x_{t1}与x_{t2}
xt1?与xt2?能在多大程度上解释
y
t
y_t
yt?,因为他过滤掉了时间趋势的影响。
而调整
R
2
R^2
R2为
(
1
?
S
S
R
∑
t
=
1
n
y
t
¨
2
)
?
n
?
p
n
?
k
(1 - \frac{SSR}{\sum_{t=1}^n\ddot{y_t}^2}) \cdot \frac{n-p}{n-k}
(1?∑t=1n?yt?¨?2SSR?)?n?kn?p?
其中,
n
?
k
n-k
n?k是主回归方程的自由度(这里是
n
?
4
n-4
n?4),
n
?
p
n-p
n?p是
y
t
y_t
yt?对时间趋势回归的自由度(这里是
n
?
2
n-2
n?2)
注意: 虽然除趋势的 R 2 R^2 R2能更加好的刻画解释变量对被解释变量的影响,但是在计算 F F F统计量的 R 2 R^2 R2形式的时候,还是用未经除趋势的 R 2 R^2 R2
季节性
如果一个时间序列是每月或每季度观测而得到的,它就有可能表现出季节性。 同时很多月份或季度数据序列都表现出季节性变化,但也并非一律如此(如: 每月利息率或通货膨胀率就没有明显的季节性变化)。 而且,有季节性变化的序列通常在公布执之前就进行了季节调整,已经除掉了其中的季节性因素。 经过季节性调整的序列,拿过来直接用就行。
如果真的需要我们自己处理季节性问题的话,在回归方程中包含总季节-1个虚拟变量就足够了,如(月份=11,季节=3)
除季节性的
β
\beta
β解释、
R
2
R^2
R2都与上面除趋势的操作一致…
列是每月或每季度观测而得到的,它就有可能表现出季节性。 同时很多月份或季度数据序列都表现出季节性变化,但也并非一律如此(如: 每月利息率或通货膨胀率就没有明显的季节性变化)。 而且,有季节性变化的序列通常在公布执之前就进行了季节调整,已经除掉了其中的季节性因素。 经过季节性调整的序列,拿过来直接用就行。
如果真的需要我们自己处理季节性问题的话,在回归方程中包含总季节-1个虚拟变量就足够了,如(月份=11,季节=3)
除季节性的 β \beta β解释、 R 2 R^2 R2都与上面除趋势的操作一致…

