前言
本示例包括
创建车道环境
creat_map_simple
update_vehicles
创建智能体Q
…
提示:以下是本篇文章正文内容,下面案例可供参考
一、环境创建
1.主车和障碍车初始化
随机初始化障碍车
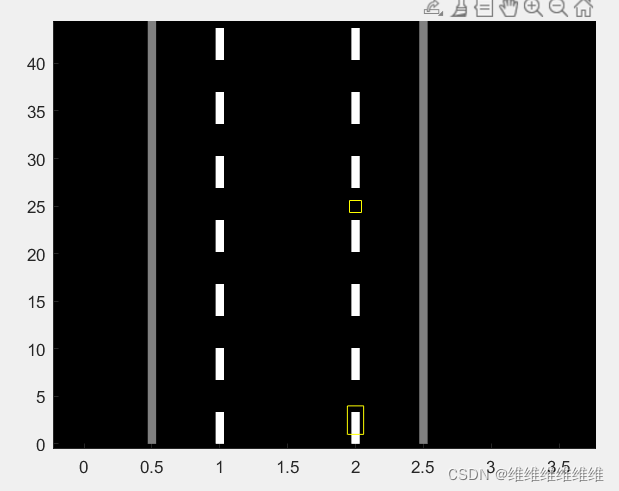
2.绘制车道线
backcolor = [0 0 0];
set(gca,'color',backcolor);
figure(1);
axis([-1 5 0 length_map]);
hold on;
%灰色路肩 白色线 黑色路面
env.h_map1 = plot([1 1], [0 length_map], 'w--','Linewidth',5);
env.h_map2 =plot([2 2], [0 length_map], 'w--','linewidth',5);
env.h_map3 =plot([0.5 0.5], [0 length_map], 'color',[0.5 0.5 0.5],'linewidth',5);
env.h_map4 =plot([2.5 2.5], [0 length_map], 'color',[0.5 0.5 0.5],'linewidth',5);

3.绘制主车和障碍车
env.h_hv = drawcar(env.hv.lane,env.hv.pos);
env.h_ov = drawcar(env.ov.lane,env.ov.pos);
%画车
function [car] = drawcar(line,pos)
%DRAWCAR 此处显示有关此函数的摘要
%in 中心点坐标
%out 绘制线条
% 此处显示详细说明
x=line;
y=pos;
w=0.06;
h=3;
if(length(y)<=1)
axis([0 4 y-15 y+30]);
car = plot([x-w,x+w],[y,y],'y',[x-w,x+w],[y+h,y+h],'y',[x-w,x-w],[y,y+h],'y',[x+w,x+w],[y,y+h],'y');
else
car = plot(x,y,'ys','markersize',10);
end
end
二、创建智能体
暂略过
总结
训练还不稳定
车辆反复横跳
突然撞车
无脑跟车

