����Ŀ����١����ȼ����˶�ģ��(��ά)
ԭ������,·���ĸ�λ����������
WX: ZB823618313
����Ŀ����١���Ŀ��ģ����
1. �Ի���Ŀ����ٵ�����
??����Ŀ�����һֱ��Ŀ����������о����ѵ���ص����⡣����Ŀ���˶�ģ�ͺ��˲��㷨��Ŀ����ٵ�������Ҫ���ء�����Ŀ��Ļ������в���Ԥ����,ʹ�����Ǻ��ѽ�����ȷ��Ŀ���˶�ģ�͡���ν���һ����Ч��ģ������ӳĿ����ʵ���˶��켣�Ǹ���Ŀ�����ϵͳ�����������⡣��������ʮ����о�,������ȡ����������Ҫ�ɹ���
��������:����Ŀ�����ӵ����Ҫ��:
������Ŀ�꽨ģ(Ҳ�DZ������ص�)
����������(��һ�����ͽ���)
�˲������(��Ŀ�����ר��)
??���㷨����,��Ŀ�����ϵͳ��,���õ��˲��㷨���Կ������˲���Ϊ������ܵĹ����㷨���������˲�����һ�����ԡ���ƫ��������������СΪ������Ź����㷨,���о�ȷ����ѧ��ʽ��������ʹ��Ч�ܡ��������˲�����ʵ������һ�����ݴ�������,�����õ����˲�����,���ݻ�ȡ�����������ɵ��Ʒ��̵��Ƹ����µ�״̬���ơ����ڼ������ʹ洢��С,�Ƚ���������ʵʱ�����Ҫ��,�ڹ���ʵ���еõ��㷺Ӧ�á�
??����֮��,�������˲�Ҳ�㷺Ӧ�������Ŀ�����,����:
��չ�������˲�EKF
���������˲�UKF
�ݻ��������˲�CKF
����������˲�QKF
���IJ�ֿ������˲�CDKF
Divided difference filter DDF
��˹����˲�GSF
ǿ�����˲�STF
�����˲�PF
�� ��
2. Ŀ��ģ����
??����Ŀ��ģ��������Ŀ��״̬����ʱ��仯�Ĺ��̡�һ���õ�ģ�͵ֵ��ϴ��������ݡ���ǰ�������е�Ŀ������㷨���ǻ���ģ�ͽ���״̬���Ƶġ��ڿ������˲���������Ŀ����������,����״̬�ռ�Ļ���Ŀ�꽨ģ��Ϊ��Ҫ�о�����֮һ��
Ŀ��Ŀռ��˶����ڲ�ͬ���˶��켣������ϵ
һά�˶�
��ά�˶�
��ά�˶�(��������Ҫ���ȼ�����άĿ��)
������ά�ȼ����˶�CAģ��:
3. �����ȼ����˶�CAģ��
Ϊ�˷���,�������¾���;
A
=
[
0
1
0
0
0
1
0
0
0
]
,
B
=
[
0
0
1
]
A=\begin{bmatrix}0&1&0\\0&0&1\\0&0&0\end{bmatrix}, B= \begin{bmatrix}0\\0\\1\end{bmatrix}
A=???000?100?010????,B=???001????
��ά�����˶�ģ��(����):
Ŀ��״̬Ϊ:xάλ�ú��ٶȼ��ٶȡ�yάλ���ٶȼ��ٶȡ�zάλ���ٶȼ��ٶȡ���
X
=
[
x
,
x
�B
,
x
��
,
y
,
y
�B
,
y
��
,
z
,
z
�B
,
z
��
]
T
{X}=[x, \dot{x},\ddot{x}, y, \dot{y},\ddot{y},z, \dot{z},\ddot{z} ]^T
X=[x,x�B,x��,y,y�B?,y��?,z,z�B,z��]T
X �B ( t ) = [ A 0 0 0 A 0 0 0 A ] X ( t ) + [ B 0 0 0 B 0 0 0 B ] W ( t ) \dot{X}(t)=\begin{bmatrix}A&0&0\\0&A &0\\0&0&A\end{bmatrix}X(t) + \begin{bmatrix}B&0&0\\0&B&0\\0&0&B\end{bmatrix}W(t) X�B(t)=???A00?0A0?00A????X(t)+???B00?0B0?00B????W(t)
4. ��ɢ�ȼ����˶�CAģ��(form 1)
Ϊ�˷���,�������¾���;
F = [ 1 T T 2 / 2 0 1 T 0 0 1 ] , G = [ T 2 / 2 T 1 ] F=\begin{bmatrix}1&T&T^2/2\\0&1&T\\0&0&1\end{bmatrix}, G= \begin{bmatrix}T^2/2\\T\\1\end{bmatrix} F=???100?T10?T2/2T1????,G=???T2/2T1????
��ɢ������ģ��:
��ά�����˶�ģ��(��ɢ):
X
k
+
1
=
[
F
0
0
0
F
0
0
0
F
]
X
k
+
[
G
0
0
0
G
0
0
0
G
]
W
k
X_{k+1}=\begin{bmatrix}F&0&0\\0&F &0\\0&0&F\end{bmatrix}X_{k} + \begin{bmatrix}G&0&0\\0&G&0\\0&0&G\end{bmatrix}W_k
Xk+1?=???F00?0F0?00F????Xk?+???G00?0G0?00G????Wk?
������
W
k
W_k
Wk?�ķ���Ϊ����������
W
(
t
)
W(t)
W(t)�Ĺ�����ǿ��
q
q
q��
5. ��ɢ�ȼ����˶�CAģ��(form 2)
��һ����ά�ȼ����˶�ģ��Ϊ:
��ά�����˶�ģ��(��ɢ):
X
k
+
1
=
[
F
0
0
0
F
0
0
0
F
]
X
k
+
W
k
X_{k+1}=\begin{bmatrix}F&0&0\\0&F &0\\0&0&F\end{bmatrix}X_{k} + W_k
Xk+1?=???F00?0F0?00F????Xk?+Wk?
��ʱ��ɢ������$W_k $����Ϊ
Q
k
=
[
Q
0
0
0
Q
0
0
0
Q
]
Q_k=\begin{bmatrix}Q&0&0\\0&Q &0\\0&0&Q\end{bmatrix}
Qk?=???Q00?0Q0?00Q????
����
Q
=
q
[
T
5
/
20
T
4
/
8
T
3
/
6
T
4
/
8
T
3
/
3
T
2
/
2
T
3
/
6
T
2
/
2
T
]
Q=q\begin{bmatrix}T^5/20&T^4/8&T^3/6\\T^4/8&T^3/3&T^2/2 \\ T^3/6& T^2/2 &T \end{bmatrix}
Q=q???T5/20T4/8T3/6?T4/8T3/3T2/2?T3/6T2/2T????
6. �ȼ����˶�CAģ��Matlabʵ��
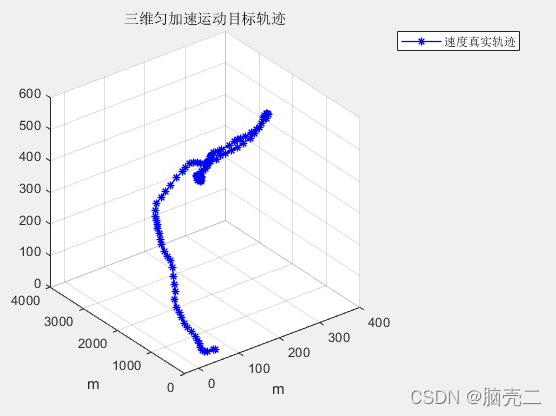
λ�ù켣: ͼ1
�ٶȹ켣: ͼ2
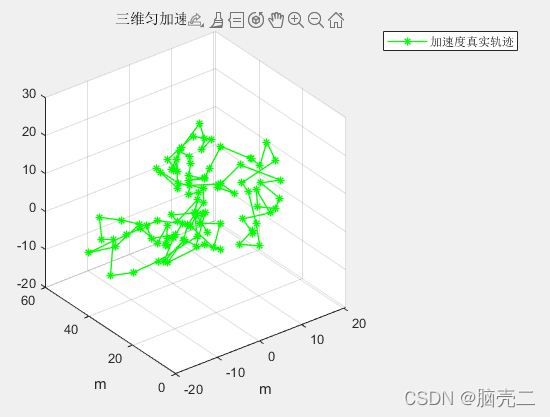
���ٶȹ켣: ͼ3

����:
% cv ��ά
clc;
clear all;
close all;
n=9; % state dimension : 0
T=1; % sample time.
N=100; %the runs atime,������ʱ��
chan=1; %channel, �㷨�ĸ���,
w_mu=[0,0,0]';
v_mu=[0,0,0]';
%% target model
q=3; % Ŀ���˶�ѧ����,��������
Qk=q^2*eye(3);% cov. of process noise
Fk=[1,T,0,0,0,0;
0,1,0,0,0,0;
0,0,1,T,0,0;
0,0,0,1,0,0;
0,0,0,0,1,T;
0,0,0,0,0,1 ];
F=[1, T, T^2/2'; 0 1 T; 0 0 1];
Fk=blkdiag(F,F,F);
G=[ T^2/2;T;1];
Gk=blkdiag(G,G,G);
% % Gk=[ T^2/2, 0, 0;
% % T, 0, 0;
% % 0,T^2/2, 0;
% % 0, T, 0;
% % 0, 0,T^2/2;
% % 0, 0, T ];
%
%% define parameter
sV=zeros(n,N,1,1); % state
x=[1000,60,5,1000,60,10,1000,50,5]';%��ʼ״̬
P_0=diag([1e5,1e2,10, 1e5,1e2,10, 1e5,1e2,10]); %��ʼ״̬����
%�˲�����ʼ��
x0=mvnrnd(x,P_0); % ��ʼ״̬
%x0=(x+normrnd(0,0.001)')';
x=x0';
for k=1:N
%% %%%%%%% target model and measurement model%%%%%%%%%%%%%%%%%%%%
%% Ŀ���˶�ѧģ��(������Ŀ�꽨ģ),�����˶�CVģ��
w=mvnrnd(w_mu',Qk)';%������������
x=Fk*x+Gk*w;
sV(:,k,1,1)=x;
end
% ��ά�����˶�Ŀ��켣
figure
plot3(sV(1,:,1,1),sV(4,:,1,1),sV(7,:,1,1),'-*r','LineWidth',1);grid on
xlabel('m');ylabel('m');
legend('λ�ù켣')
title('��ά�ȼ����˶�Ŀ��켣')
% ��ά�����˶�Ŀ��켣
figure
plot3(sV(2,:,1,1),sV(5,:,1,1),sV(8,:,1,1),'-*b','LineWidth',1);grid on
xlabel('m');ylabel('m');
legend('�ٶ���ʵ�켣')
title('��ά�ȼ����˶�Ŀ��켣')
% ��ά�����˶�Ŀ��켣
figure
plot3(sV(3,:,1,1),sV(6,:,1,1),sV(9,:,1,1),'-*g','LineWidth',1);grid on
xlabel('m');ylabel('m');
legend('���ٶ���ʵ�켣')
title('��ά�ȼ����˶�Ŀ��켣')
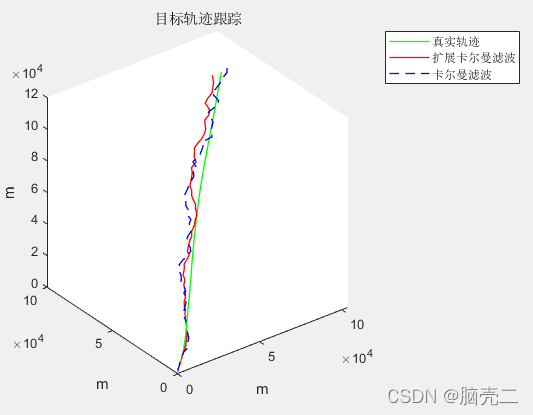
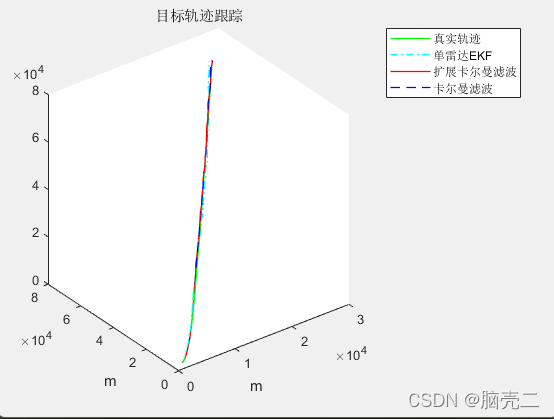
7. ����������չ�������˲�ʵ����άĿ�����
�㷨:�������˲�����չ�������˲�
������:�״�
���ٴ���:����:ZB823618313
��������:�;���,�߾���
�״�����ģ��
�״�����Ϊ����,��λ��,������
r
k
m
=
r
k
+
r
~
k
b
k
m
=
b
k
+
b
~
k
e
k
m
=
e
k
+
e
~
k
{r}_k^m=r_k+\tilde{r}_k\\ b^m_k=b_k+\tilde{b}_k\\ e^m_k=e_k+\tilde{e}_k
rkm?=rk?+r~k?bkm?=bk?+b~k?ekm?=ek?+e~k?
����
r
k
=
h
r
(
x
k
,
v
k
)
=
(
x
k
?
x
0
)
+
(
y
k
?
y
0
)
2
)
b
k
=
h
b
(
x
k
,
v
k
)
=
tan
?
?
1
y
k
?
y
0
x
k
?
x
0
e
k
=
h
e
(
x
k
,
v
k
)
=
tan
?
?
1
z
k
?
z
0
(
x
k
?
x
0
)
2
+
(
y
k
?
y
0
)
2
r_k=h_r(x_k,v_k)=\sqrt{(x_k-x_0)^+(y_k-y_0)^2)}\\ b_k=h_b(x_k,v_k)=\tan^{-1}{\frac{y_k-y_0}{x_k-x_0}}\\ e_k=h_e(x_k,v_k)=\tan^{-1}{\frac{z_k-z_0}{\sqrt{(x_k-x_0)^2+(y_k-y_0)^2}}}\\
rk?=hr?(xk?,vk?)=(xk??x0?)+(yk??y0?)2)?bk?=hb?(xk?,vk?)=tan?1xk??x0?yk??y0??ek?=he?(xk?,vk?)=tan?1(xk??x0?)2+(yk??y0?)2?zk??z0??
[
x
0
,
y
0
,
z
0
]
[x_0,y_0,z_0]
[x0?,y0?,z0?]Ϊ������(�״�)����,һ�����Ϊ0���״�����Ϊ
z
k
=
[
r
k
,
b
k
,
e
k
]
��
z_k=[r_k,b_k,e_k]'
zk?=[rk?,bk?,ek?]����
���ٹ켣ͼ��ͼ��ʾ:
�����Ǹ���RMSE����:�������پ���
�RMSE
�ٶ�RMSE


8. ����ģ��
8.1 ����ת��CTģ��
����ת��CT�˶�ģ�ͼ���һ������:������ά����ά
8.2. Singerģ��
Singerģ�ͼ���һ������
8.3. ����ǰ��ͳ��ģ��
��ǰͳ��ģ�ͼ���һ������
8.4. Jerkͳ��ģ��
Jerkģ�ͼ���һ������
==ԭ������,·���ĸ�λ����������=

