ЯЕСаЮФеТФПТМ
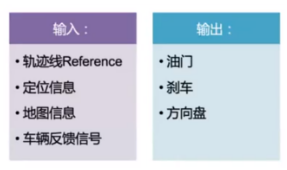
ЬсЪО:етРяПЩвдЬэМгЯЕСаЮФеТЕФЫљгаЮФеТЕФФПТМ,ФПТМашвЊздМКЪжЖЏЬэМг
TODO:аДЭъдйећРэ
ЮФеТФПТМ
ЧАбд
ШЯжЊгаЯо,ЭћДѓМвЖрЖрАќК,гаЪВУДЮЪЬтвВЯЃЭћФмЙЛгыДѓМвЖрНЛСї,ЙВЭЌГЩГЄ!БОЮФЯШЖдздЖЏМнЪЛПижЦФЃПщГѕЬНзіИіМђЕЅЕФНщЩм,ОпЬхФкШнКѓајдйИќ,ЦфЫћФЃПщПЩвдВЮПМШЅЮвЦфЫћЮФеТ
ЬсЪО:вдЯТЪЧБОЦЊЮФеТе§ЮФФкШн
вЛЁЂздЖЏМнЪЛПижЦФЃПщЕФЪфШыЪфГі
.
.
ЖўЁЂздЖЏМнЪЛПижЦЕФШЮЮёвЊЧѓ
дкздЖЏМнЪЛЕФПижЦФЃПщжа,ДІРэЕФЪЧИќМгЯИНкЕФЖЋЮї,ШєБШгїЙцЛЎЙизЂЕФЪЧШчКЮБмеЯКЭбВКН,дђПижЦЙизЂЕФЪЧТЗУцгавЛИіПгЕМжТГЕСОВрЧуЁЂгЭУХЩВГЕЕФЫГЛЌГЬЖШЁЂИїжжЛЗОГИЩШХЯТЕФПижЦЪеСВЁЂЙьМЃИњзйЕФзМШЗадЁЂЮШЖЈадЁЂПьЫйадЁЃ
ЕиЭМЁЂИажЊЁЂЙцЛЎЕФЪЕЪБадПЩвдВЛФЧУДИп,ЕЋЪЧЖЈЮЛКЭПижЦЕФЪЕЪБадБиаыЪЧИпЪЕЪБадЕФ!
ПМТЧЕНЪЕЪБадЕФдМЪј,БШНЯИДдгЕФЫуЗЈвЛАуБШНЯФбВПЪ№,ГЃгУЕФЛЙЪЧМђЕЅЛљгкФЃаЭЩѕжСВЛЛљгкФЃаЭЕФPID,ЪЙгУLQRКЭMPCЕФашвЊНЯКУЕФДІРэЦїЁЃ
.
.
Ш§ЁЂздЖЏМнЪЛПижЦФЃПщЕФдЄДІРэ

1ЁЂЪ§ОнЧхЯДжївЊеыЖдЕФЪЧЖЈЮЛЕФЦЏвЦЁЂЙцЛЎТЗОЖЕФЬјБф(ЙцЛЎТЗОЖЕФКЯРэад)
2ЁЂКЯРэадМьВщ,жївЊМьВщГЕЛњЯЕЭГЕФгВМўДЋИаЦїгаУЛгаЙЪеЯ,ШэМўСДТЗФмВЛФмДђЭЈ
3ЁЂНєМБДІРэ:ПижЦФЃПщвЛАугаздМКвЛЬзБЃжЄАВШЋЕФЩшБИ,ШчГЌЩљВЈОрРыМьВтЁЂКСУзВЈРзДя,ВЂВЛвРРЕЕМКНЯЕЭГЁЃБЃжЄПижЦЕФОјЖдАВШЋадЕФШпгрЛњжЦЁЃ
4ЁЂаХКХдыЩљТЫВЈ:жївЊДІРэДЋИаЦїЕФаХКХдыЩљ,ЪЙгУГЃгУЕФТЫВЈЫуЗЈОЭКУ
.
.
ЫФЁЂздЖЏМнЪЛПижЦФЃПщЕФЩшМЦВНжш
.
.
ЮхЁЂздЖЏМнЪЛПижЦФЃПщЕФКѓДІРэ
1ЁЂЪфГіаХКХЯоЗљ:ИљОнжДааЦїЕФвЊЧѓНјааАВШЋЯоЗљКЭВЙГЅ
2ЁЂЪфГіаХКХЦНЛЌТЫВЈ
3ЁЂЪфГіаХКХЕФАВШЋМьВщ

