参考链接:https://blog.csdn.net/joun772/article/details/119712122
更换设备时候记得在catkin_plvins/src/feature_tracker/CMakeLists.txt修改一部分地址
主要有俩部分:
第30行的换成自己的地址
include_directories(
${catkin_INCLUDE_DIRS}
${EIGEN3_INCLUDE_DIR}
/home/jyy/catkin_plvins/src/feature_tracker/src/line_descriptor/include # find LSD
)
最后一行(61行)
target_link_libraries(LineFeature_tracker
${catkin_LIBRARIES}
${OpenCV_LIBS}
/home/jyy/catkin_plvins/src/feature_tracker/src/line_descriptor/lib/liblinedesc.so # line feature
)
接着编译,出现如下问题:
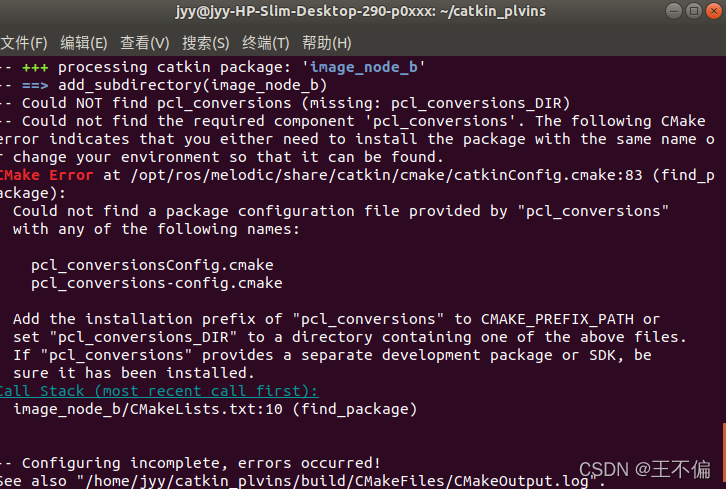
解决办法:安装(1) sudo apt-get install ros-melodic-pcl-conversions
(2 ) sudo apt-get install ros-melodic-navigation
解决办法:sudo apt-get install ros-melodic-pcl-ros
运行:
roscore
roslaunch plvins_estimator plvins_show_linepoint.launch
rosbag play YOUR_PATH_TO_DATASET/MH_05_difficult.bag
运行中的问题:
plvins_show_linepoint.launch如果报错[plvins_show_linepoint.launch] is neither a launch file in package [plvins_estimator] nor is [plvins_estimator] a launch file name
The traceback for the exception was written to the log file
解决步骤:
- 因为下载下来的代码文件夹是vins_estimator,所以改成plvins_estimator就行
- 重新编译,添加路径:
sudo gedit ~/.bashrc
将:
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:/home/jyy/catkin_plvins/src/plvins_estimator
source ~/catkin_plvins/devel/setup.bash
放在最后
保存文件,最后再source 一下:
source ~/.bashrc
- 因为下载下来的代码中launch文件是plvins-show-linepoint.launch,所以改成plvins_show_linepoint.launch
就行

