ǰ��
��ƪ����ΪKLT��������������Ƶ��ƥ��������Եľ���ʵ�֡�=> Դ���Github openCV�汾:4.5.5
�������
1. ������ȡ
(1) SIFT������ȡ���÷�ʽ
sift=cv2.SIFT_create() # ORB_create()
kp,d=sift.detectAndCompute(frame_gray, None)
OpenCV-Python Tutorials-Feature Detection and Description
����ƥ�����±����˵�� kp1��������DMatch��������ΪqueryIdx����
(2) �ǵ���
�ǵ�:ijһ�������ⷽ���һ��С�䶯��������ҶȺܴ�ı仯��
�ǵ����㷨����:
- ���ڻҶ�ͼ��Ľǵ���
�����ݶȡ�����ģ�塢����ģ���ݶ���� - ���ڶ�ֵͼ��Ľǵ���
- �����������ߵĽǵ���
����ģ��ķ�����Ҫ���������������Ҷȱ仯 ,��ͼ�����ȵı仯�������ڵ����ȶԱ��㹻��ĵ㶨��Ϊ�ǵ㡣�����Ļ���ģ��Ľǵ����㷨�� Kitchen-Rosenfeld�ǵ����㷨��Harris�ǵ����㷨��KLT�ǵ����㷨��SUSAN�ǵ����㷨 ��
Harris�ǵ���
cv2.cornerHarris()
Shi-Tomasi�ǵ���
(Harris�ǵ���Ľ��װ�)
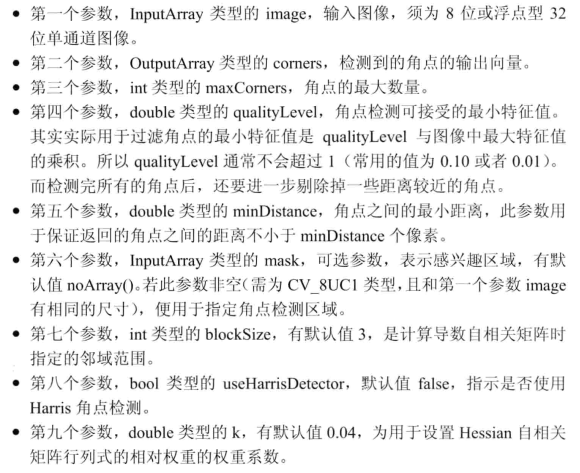
cv2.goodFeaturesToTrack()
void cv::goodFeaturesToTrack(
cv::InputArray image, // ����ͼ��(CV_8UC1 CV_32FC1)
cv::OutputArray corners, // ����ǵ�vector
int maxCorners, // ���ǵ���Ŀ
double qualityLevel, // ����ˮƽϵ��(С��1.0������,һ����0.01-0.1֮��)
double minDistance, // ��С����,С�ڴ˾���ĵ����
// ����Ϊ��ѡ����
cv::InputArray mask = noArray(), //ָ������Ȥ���� mask=0�ĵ����
int blockSize = 3, // ʹ�õ�������:����Э�������ʱ�Ĵ��ڴ�С
bool useHarrisDetector = false, // false ='Shi Tomasi metric'
double k = 0.04 // Harris�ǵ���ʱʹ��
);
// �������²���:
void cv::goodFeaturesToTrack(image,corner,
500, // �����Ľǵ���
0.01, // ��ֵϵ��
10); // �ǵ�����С����
�ǵ��������֮һ(cornerHarris��Shi-Tomasi��FAST)
ע��:�ǵ���ֱ������������ƥ��,������ƥ�䶼����Ҫ�����ӵ�
�ο�:
cv2.GFTTDetector_create���ǵ���Ϊ�������������ƥ��
��Shi-Tomasi�ǵ���+SIFT����ƥ�䡿����ֵ��Ҫ����һ��ת��
(3) �����ڽǵ���
# size���ڸ����,�������,����չ��
st1,corner1=cv2.findChessboardCorners(frame1gray,(9,6),None) # <class 'numpy.ndarray'>
�����˸���size�Ľǵ�,st�Ż᷵�ط�0ֵ
����ϸ�ĺ���˵��:�ǵ�����FindChessboardCorners����
2. ����ƥ��
���ڲ��Ǻ����ֻ������SIFT/SURF��FLANNƥ�� & һ���ܺõ�ѧϰopenCV�IJ���
(1) Harris�ǵ�ƥ��
����PCV��
�ǵ�����ƥ��
KLT-Tracking
lk_params=dict(winSize=(15,15),
maxLevel=2,
criteria=(cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, 10, 0.03))
tk2,st,err=cv2.calcOpticalFlowPyrLK(frame2gray,frame_nxgray2,track_points2,None,**lk_params)
python-openCV�ٷ��ĵ����ڸú��������
KLT��Ƶƥ����ټ���Ҫ��
1. �жϾ�ֹ�� ?ǰ����֡������λ��С?
2. �жϱ��ڵ��� ?st==0
3. �ж��Ƿ������ȷ ?���ؼ��?
4. �ж�ƥ���Ƿ���ȷ ?RANSAC?
Sift KLT
ע����ȡ������� ���ͺ�����ת��-Github
������BUG
-
�������ⷽ������sift�Ĺ�����,ע����������ʽ��ת�������е�������ʽdtypeת��
error: (-215:Assertion failed) (npoints = prevPtsMat.checkVector(2, CV_32F, true)) >= 0 in function -
YOLOv3����Ȩ�ر��� ?(opencv�汾��ͬ����������ʽ��ͬ)
output_layers=[layer_names[i[0]-1] for i in net.getUnconnectedOutLayers()] IndexError: invalid index to scalar variable.

