在获取启发式速度规划以后,需要对其进行平滑处理
scenario_type: LANE_FOLLOW
stage_type: LANE_FOLLOW_DEFAULT_STAGE
stage_config: {
stage_type: LANE_FOLLOW_DEFAULT_STAGE
enabled: true
task_type: LANE_CHANGE_DECIDER
task_type: PATH_REUSE_DECIDER
task_type: PATH_LANE_BORROW_DECIDER
task_type: PATH_BOUNDS_DECIDER
task_type: PIECEWISE_JERK_PATH_OPTIMIZER
task_type: PATH_ASSESSMENT_DECIDER
task_type: PATH_DECIDER
task_type: RULE_BASED_STOP_DECIDER
task_type: ST_BOUNDS_DECIDER
task_type: SPEED_BOUNDS_PRIORI_DECIDER
task_type: SPEED_HEURISTIC_OPTIMIZER
task_type: SPEED_DECIDER
task_type: SPEED_BOUNDS_FINAL_DECIDER
# task_type: PIECEWISE_JERK_SPEED_OPTIMIZER
task_type: PIECEWISE_JERK_NONLINEAR_SPEED_OPTIMIZER
task_type: RSS_DECIDER
......PIECEWISE_JERK_SPEED_OPTIMIZER
分段常加加速度优化 Piecewise jerk Speed optimization
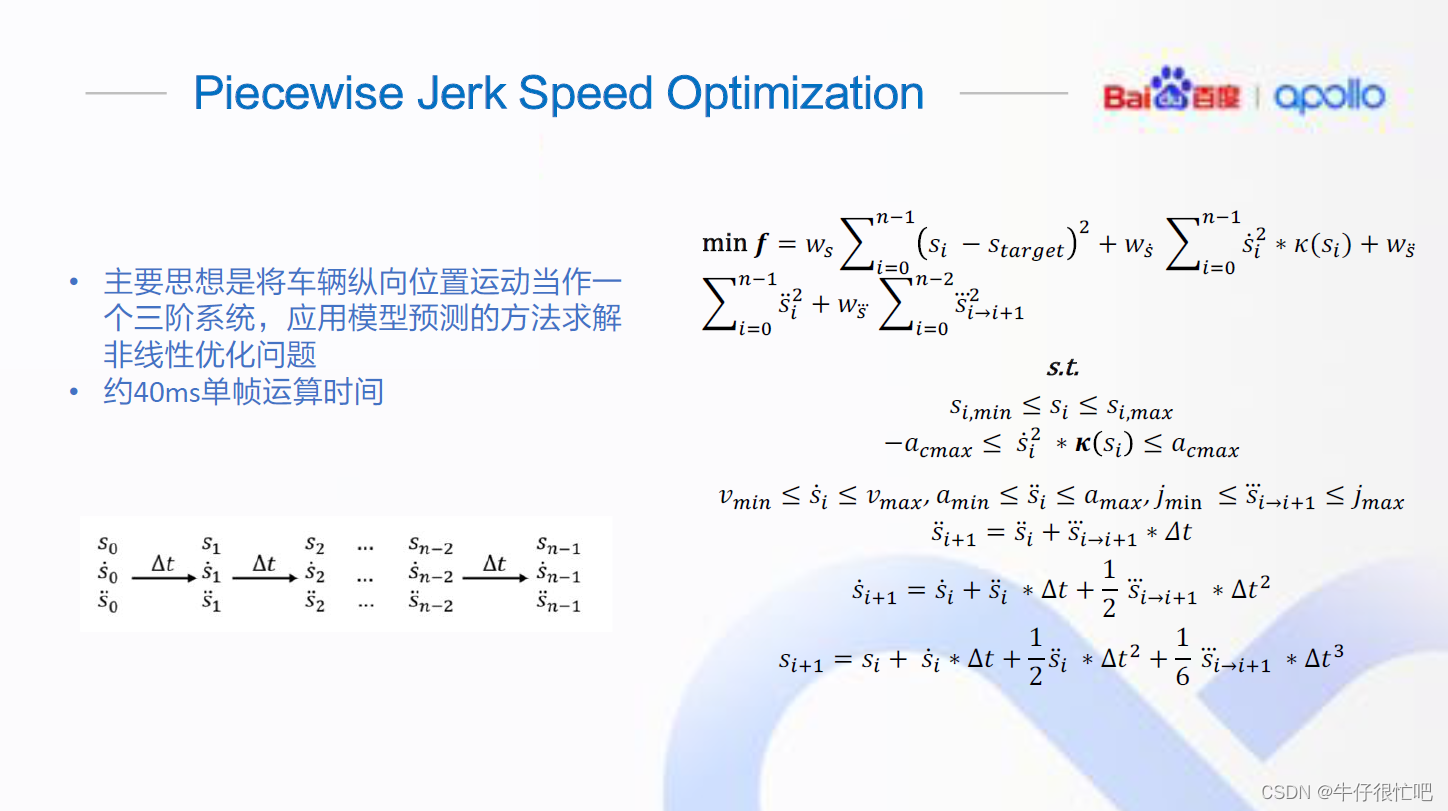
算法理论:
离散t,优化变量为?,建模为QP问题/IPOPT问题
代码解析:
【规划】Apollo QSQP接口详解_lemon_zy的博客-CSDN博客
Planning-Apollo速度决策规划_Schulz King的博客-CSDN博客_apollo速度规划???????

