GNSS˵��(��)��������Ӧ��̬������λ(��)��Kalman�˲�
Kalman�˲�
Kalman�˲��������ص��Ƕ�״̬�ռ���й���,��״̬�ռ����һ���Ƕ�̬���ơ�Kalman�˲����õ����㷨,���ɲ�������ǰ��ֵ���µĹ۲����ݽ���״̬�����ĸ��¡����Kalman�˲�һ��ֻ��洢ǰһ����Ԫ��״̬������ֵ,����洢������ʷ�۲���Ϣ����ȻKalman�˲����кܸߵļ���Ч��,���ɽ���ʵʱ���ơ�
Kalman�˲��������ź������ֵ�Ļ���ͳ������(һ�ס�����ͳ������),�������ڲ�����״̬�ռ����,��״̬��������ϵͳ,�ź���Ϊ״̬,���������ܹ���ƽ�ȵ�һά�ź��������,���ܹ��Ʒ�ƽ�ȵĶ�ά(����)�ź�������̡�
���˲������źŴ�������Ҫ����,һ�����ڴӾ�����������������ȡ�źš�������һ����,�˲������������(��ͨ�š��״���������𡢴�ز��������﹤�̵�)���й㷺Ӧ�á����˲����е�����������:�˲��pƽ����Ԥ����ÿһ�����㶼����һ�ֹ���(Haykin,2002)��
���˲�����ָ�����й۲��ź�(�����۲�ʱ��t�Ĺ۲�����)����ȡ�źŵķ���(������,2000,2001)��
��ƽ������ָ��ֱ���۲�ʱ��t�Ĺ۲���Ϣ��,��ȡʵ�������t��(t��<t)ʱ���ź�,������ȡt��ʱ�̵��ź�ʱ�õ���t���Ժ�Ĺ۲��źš�
��Ԥ����ּ�ڵ����۲�֮��������źš�
�˲����Է�Ϊ�����˲��ͷ������˲�������˲���������ǹ۲���������Ժ���,��Ƹ��˲�Ϊ�����˲��o�����Ϊ�������˲���
���������˲�
�����ѵõ��źŵ�ijЩͳ�Ʋ���(���ֵ����غ���),ͬʱҲ�õ�һЩ����Ҫ�ĸ������,�����˲�����Щ��������������Ϊ����,��ij��ͳ��������˲�ϵͳ,ʹ�����˲������Ӱ����С��ʵ���������˲����Ż����⡣ͨ�����õ����Ż���Ϊ����źž��������С,������źŶ���Ϊ�����ź���ʵ���˲�����ź�֮��������ź�Ϊƽ������ʱ,�ɸ���ɵõ�ά��(Wiener)�˲���
���źŻ��������ڷ�ƽ��״̬ʱ,ά���˲������Ի�����Ž�,��ʱ�����˲�������Ӧ��ʱ���źź������Ĵ�����ҵ��֤��Kalman�˲���ʱ��״̬���ܹ�������Ž⡣
ά���˲��Ϳ������˲�������ʱ�����к���ɢʱ�����е��źŴ����еõ��˽�ȫ��ķ�չ������ʵ����,һ��ʹ����ɢʱ���ʾ��ά���˲���Kalman �˲�������������ʱ������һ����еȼ����ǵȼ������ɢ�������,��ʹ�˲��ź�����,������˲����ʵ����۶�����൱��
����Ӧ�˲�
ά���˲�Ҫ������������ݼ���ͳ������������Ϣ��֪,���롢���ͳ������������˲������ݵ�������Ϣ���Ǻϩo��˿ɻ�������˲��⡣Ȼ��,����Щ��Ϣ��������Ҫ��ʱ,����Ƶ��˲������ܻ�����Ž⡣����Ӧ�˲�����Ϊ�˷���һ�������չ�����ġ���ν����Ӧ�˲���ζ�ž�������ƹ��ܩo���ڵ��Ƽ��������,���ӵ�֪����źŵ�����ʱ,Ҳ�ܻ�ñȽ�����Ľ��������Ӧ�˲��㷨��ijЩԤ֪�ij�ʼ������ʼ,���������˽����Ϣ�����ܵؿ��ǽ��˲�ϵͳ������,����̬�����,������������,����Ӧ�˲�Ӧ��ijЩͳ������������ά���˲�,���ڷ���̬�����,���㷨���и��ٹ���(Tracking Capability),����ij��ͳ����Ҫ�������������ʱ��ı仯����Ȼ,����Ӧ�˲��IJ����ڵ��������в��ϸ���,���Dz����߶������۲���Ϣ��������������Ӧ�˲����д����о��ɹ��oȻ��ʵ����Ӧ��ѡ���������Ӧ�˲�,��Ȼ��ͳһ����,��һ��Ӧ��ѭ����ԭ��:

��������Ӧ�˲��ļ����㷨
��������Ӧ�˲���һ���Dz�Ψһ�ġ��ж�����ʽ��ʾ������Ӧ�˲��㷨,ÿһ���㷨�����и��Ե��������ԡ����ڲ�ͬ�û���˵,���������˽��������Ӧ�˲��Ĺ��ܼ�������,Ȼ��ѡ���ʺ��Լ�������;������Ӧ�˲��㷨��
�ڵ���������,������������Ӧ�˲�һ�������С����(LS)�㷨��
��С��������Ӧ�˲��㷨����ʧ�����������ָ�궨��Ϊ��Ȩ����в�ƽ���͡���������Ϊ������Ӧ��ʵ���˲����֮���С�����㷨���Թ���ɵ��ƹ��ƻ�������ơ��������������������������ֳɵȳ������ݿ�(ʱ���),�˲����������ݰ�һ��һ��������
������С���˹��ƿ��Կ����������Kalman�˲�,һ��������: Kalman�˲���״̬�ռ��ʾ,���ṩ��ֱ����ǰ�˲�ʱ�̵����������˲������˵IJ�ȡ�
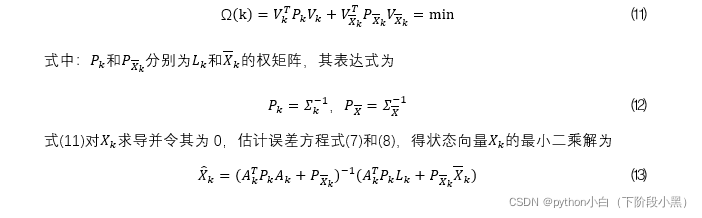
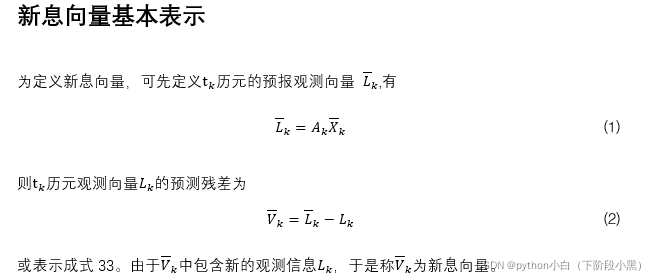
����ѧģ��
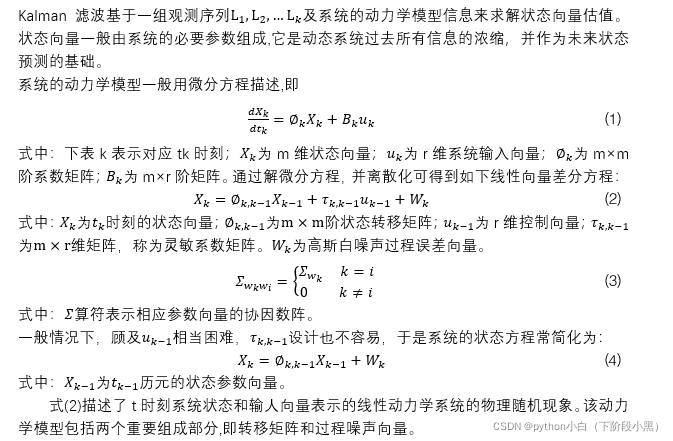
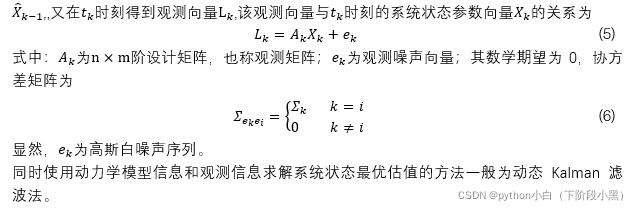
�۲�ģ��

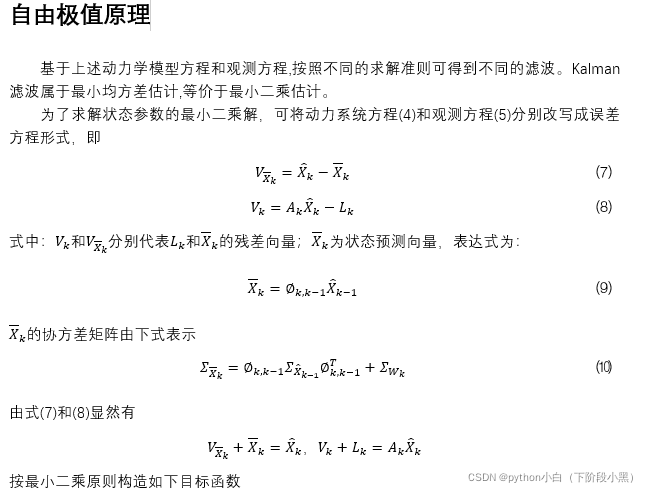
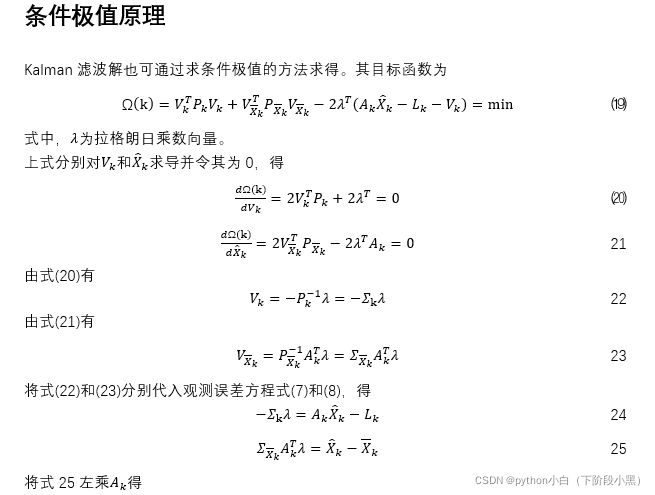
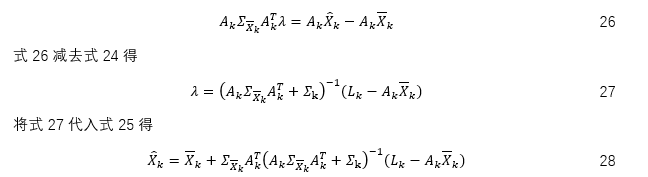
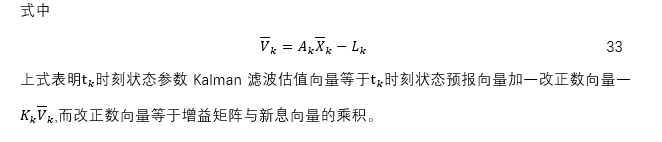
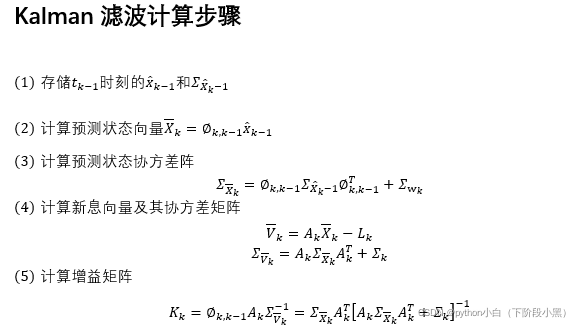
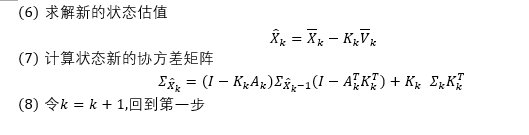
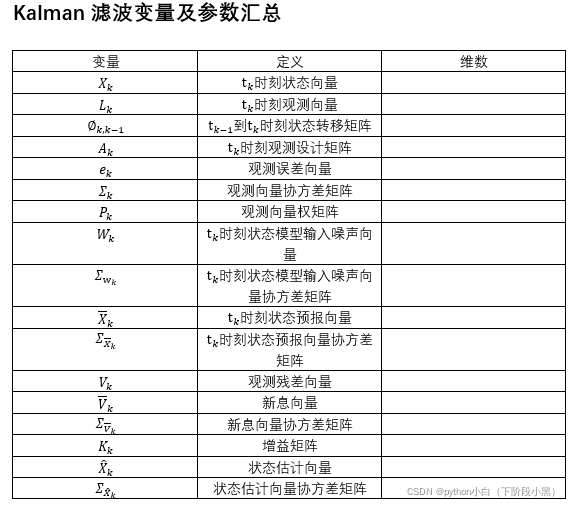
Kalman�˲�һ�����ԭ��


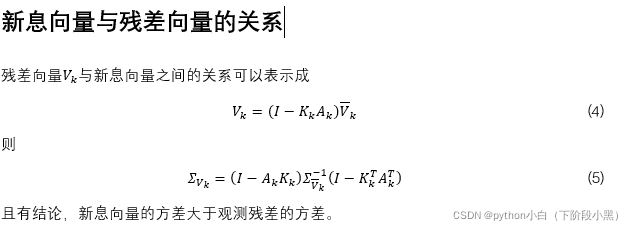
Kalman�˲���Ϣ������������
����Kalman�˲�����ģ�͵Ĺ�����Ƶ���������Ϣ����,���Ԥ��в�������Kalman�˲���������,���㷽���ĸĽ�,����Ӧ�˲��Ĺ���Ҳ��������Ϣ������

Kalman�˲���С��
��ʽ��Ϊ�����ֶ��ó�,��������,�����ҽ���ָ��!

