ժҪ
�������ṩһ���Ӿ���������Լ��ļ��㷽�����÷������ú��ʵ��Ӿ���λģ�͡���ѧ�㷨�ͷḻ�ĵ�����������,����˶�λ���ȺͶ�λ����Ŀ����ԡ������GNSS�ڸ��ӻ���������֤�����Զ���������������㷨���ܲ��������,������ʵ�ַɻ����ܽ�����������½,��ȷ�����շ��а�ȫ������Ҫ���塣
?
?
?
����ο����ר������
��
��������
�������漰���ǵ�����������,�����˵,�漰һ�������Ӿ���������Լ��ļ��㷽����
1 ����
�������ǵ��������ķ�չ�㷺Ӧ��,����Խ��Խ��ʶ��ȫ�����ǵ���ϵͳ����Ե���Ҫ�ԡ�һ�ݵ��鱨����ʾ,�ں���Ӧ����,�����¹ʴ��������Ľ����ͽ���Ρ����ܷɻ��Ľ����ͽ������Ȼ���,��Ҳ�DZ���������ȫ��ؼ��Ļ��ڡ�
ȫ��λϵͳ(GPS)���ջ�����������Լ��ͨ��������Ƕ�λ�۲��һ�������ṩ����ϵͳ������ԡ�Ȼ��,�ڷ���·���Ľ�������½��,�������Ƕ�λ�۲�IJ���,���еĽ��ջ���������Լ�ⷽ��������һ�㲻�������ϸ�Ӧ�ö�����ԺͿ����Ե�Ҫ�����,��������GNSS���Ӿ������豸�ѳ�Ϊ�������ǵ��������һ���ȵ㡣
Ŀǰ,�������պ����ѧ���������������о����ȸ�У���о����������ǵ���������Խ��������ۺͼ����о�����GPS�����GPS,�ٵ���������ϵͳ,����Ե���ϵͳ����ϵ���ϵͳ,�����ǵ���������Խ�����Խ��Խ����о������ͬʱ,���Ƕ�λ����Լ�ⷽ���Ѿ���Գ���,�����Ƕ�λ�ź������л�������������µ����ÿ��������õ���֤,��������������㷨�����ܲ��㡣���,�����������һ�����ڼ���Ӿ���������ϵͳ����Ե��о�������
2 �ܽ�
Ϊ������м�������������֤���ӻ�����������������Ƕ�λ�����ܿ����Զ���������������㷨���ܲ��������,�������ṩ��һ���Ӿ����������Լ����㷽�������а���:
- ���ݾ�����Ӿ���λ�����������ʵ��Ӿ���λģ��,������Ӿ���λ��;
- �����Ӿ�ϵͳ���������,���������״̬����;
- �����Ӿ��۲�ģ��,�����Ӿ�ϵͳ�۲���� H H H;
- �����Ӿ�����ƫ��,��������ƫ������ b b b���Ӿ��۲�ֵ�ı仯;
- ����Ӿ�ϵͳ�۲ⷽ�̺����Ƕ�λ���̼�����ϵ�����λ����;
- ���㲻ͬ����ģʽ�µı���ˮƽ��
����(1)�е��Ӿ���λģ���ھ�����Ӿ���λ�����пɷ�Ϊ����,��һ��Ϊ�ֶ����õر���Ϊ��½�ο�,�ڶ���Ϊ�����ܵ���Ϊ��½�ο����ֶ����õĵ����־Ϊ��H����I����־;��ʹ�û����ܵ���Ϊ��½�ο����ǽ��û������������Ļ����ܵ��ȸ���,��������Ϳ��Կɿ���ʶ������ܵ�Ŀ�ꡣ��һ��,�ڵ�������ϵ�¹����Ӿ���λ��������:
t
m
n
=
s
m
n
+
p
n
+
q
n
t_m^n=s_m^n+p^n+q^n
tmn?=smn?+pn+qn
��·�������ϵ�µ���������
s
m
c
s_m^c
smc?������ڻ���ϵ��λ��
q
b
=
[
x
1
?
y
2
?
z
3
]
T
q^b=[x_1\ y_2\ z_3]^T
qb=[x1??y2??z3?]T����½·���λ������
t
m
n
=
[
x
2
?
y
2
?
z
2
]
T
t_m^n=[x_2\ y_2\ z_2]^T
tmn?=[x2??y2??z2?]T��֪ʱ,�ɻ�����ά�����λ��
p
n
=
[
x
3
?
y
3
?
z
3
]
T
p^n=[x_3\ y_3\ z_3]^T
pn=[x3??y3??z3?]T���Ա����㡣����
t
m
n
t_m^n
tmn?��ʾ��
m
m
m��·����ڵ���ϵ�е�λ������;
s
m
n
s_m^n
smn?��ʾ��
m
m
m��Ŀ���ڵ���ϵ�µ���������;
p
n
p^n
pn��ʾ�ڵ���ϵ�µķɻ�λ������;
q
n
q^n
qn��ʾ������ĵ��ɻ����ĵľ���,��Ҳ����Ϊ����ͷɻ�֮�����С�Ƕ�ƫ������;
q
b
q^b
qb��ʾ����ϵ�������λ��,������ͨ���������У��
��һ��,���Ӿ�ϵͳ����������������,���������״̬�����IJ����������:
- ������������ѧ���������״̬������ʾΪ:
�� x = [ �� p n ? �� t m n ] \delta x=[\beta p^n \ \delta t_m^n] ��x=[��pn?��tmn?]
���� �� p n \delta p^n ��pnָ�ɻ���άλ�õ��������: �� p n = p ~ n ? p n \delta p^n=\tilde{p}^n-p^n ��pn=p~?n?pn; �� t m n \delta t_m^n ��tmn?��·���������: �� t m n = t ~ m n ? t m n \delta t_m^n=\tilde{t}_m^n-t_m^n ��tmn?=t~mn??tmn?,���б��ֵ�ò����߱�ʾ�� - ��һ����½·�������뿪�����Ұʱ,·�������ʵ���ϻ�����ʱ����仯,��������һ�����������·���������,�Ա��ּ���Ч�ʡ�
��һ��,�����Ӿ�ϵͳ�۲���� H i s H_{is} His?�IJ����������:
-
m
g
mg
mg·���Ӿ��۲ⷽ�̱�ʾΪ:
z m ( t i ) = T c p i x s �� m c ( t i ) + v ( t i ) z_m(t_i)=T_c^{pix}\underline{s}_m^c(t_i)+v(t_i) zm?(ti?)=Tcpix?s?mc?(ti?)+v(ti?)
���� z m ( t i ) z_m(t_i) zm?(ti?)����½·��� m m m������λ��; T c p i x T_c^{pix} Tcpix?����������ϵ���������ϵ֮��ı任����; s m c s_m^c smc?ָ����λ�ö�Ӧ�ڴ�������������������������; s m z c s_{m_z}^c smz?c?������� s z s_z sz?�����ϵ���ѧ���ĵľ���; s �� m c ( t i ) \underline{s}_m^c(t_i) s?mc?(ti?)�������Ŀ�� m m m�����������ı�����ʽ; v ( t i ) v(t_i) v(ti?)��һ����ֵΪ0Э����Ϊ R R R�Ķ����ļ��Ը�˹������,���������¹�ϵ:
E [ v ( t i ) v t ( t j ) ] = { R , ?? t i = t j 0 , ??? t i �� t j E[v(t_i)v^t(t_j)]=\begin{cases} R, \ \ t_i=t_j \\ 0, \ \ \ t_i \neq t_j \end{cases} E[v(ti?)vt(tj?)]={R,??ti?=tj?0,???ti?��?=tj?? - ����һ����
H
H
H��
W
W
W�ľ���
(
M
��
N
)
(M\times N)
(M��N)����������,��������ϵ���������ϵ�ı任��ϵΪ
T
c
p
i
x
T_c^{pix}
Tcpix?,������֪��,
T
c
p
i
x
T_c^{pix}
Tcpix?��
T
p
i
x
c
T_{pix}^c
Tpixc?֮��Ĺ�ϵ����:
T p i x c = [ ? H f M 0 H ( M + 1 ) 2 f M 0 W f N ? W ( N + 1 ) 2 f N 0 0 1 ] = ( T c p i x ) ? 1 T_{pix}^c = \begin{bmatrix} -\frac{H}{fM} & 0 & \frac{H(M+1)}{2fM} \\ 0 & \frac{W}{fN} & -\frac{W(N+1)}{2fN} \\ 0 & 0 & 1 \end{bmatrix} = (T_c^{pix})^{-1} Tpixc?=?????fMH?00?0fNW?0?2fMH(M+1)??2fNW(N+1)?1?????=(Tcpix?)?1
һ�������Է��� z m ( t i ) = T c p i x s �� m c ( t i ) + v ( t i ) z_m(t_i)=T_c^{pix}\underline{s}_m^c(t_i)+v(t_i) zm?(ti?)=Tcpix?s?mc?(ti?)+v(ti?)�����Ի�,һ�������Ժ�������Ϊ h [ x ( t i ) ] = T c p i x s �� m c ( t i ) h[x(t_i)]=T_c^{pix}\underline{s}_m^c(t_i) h[x(ti?)]=Tcpix?s?mc?(ti?),������һ��̩��չ��ʽ,�õ��Ӿ�ϵͳ�۲���� H H H,����ʽ�õ����Ӿ�ϵͳ�۲���� H H H��Ԫ�ص�ƫ����Ϊ:
H = [ ? h ? p n ? 0 ] H=[\frac{\partial h}{\partial p^n}\ 0] H=[?pn?h??0]
��Ϊ,
q n = C b n C c b s m c + C b n q d = C b n ( C c b s m c + q d ) q^n=C_b^nC_c^bs_m^c+C_b^nq^d=C_b^n(C_c^bs_m^c+q^d) qn=Cbn?Ccb?smc?+Cbn?qd=Cbn?(Ccb?smc?+qd)
h h h����� p n p^n pn��ƫ����Ϊ:
? h ? p n = 1 s m z c T c p i x ( s �� m c C n b C b c ? C n b C b c ) \frac{\partial h}{\partial p^n}=\frac{1}{s_{m_z}^c}T_c^{pix}(\underline{s}_m^cC_n^bC_b^c-C_n^bC_b^c) ?pn?h?=smz?c?1?Tcpix?(s?mc?Cnb?Cbc??Cnb?Cbc?)
��Ϊ�Ӿ�ϵͳ�۲���� H H H�� t m n t_m^n tmn?��, H H H�� �� t m n \delta t_m^n ��tmn?��ƫ����Ϊ�㡣
��һ��,��������ƫ������ b b b�����߹۲����� z z z�ı仯��������:
- ״̬����
x
x
x�����Ի��Ӿ��۲�ģ�ͱ�ʾΪ:
z = H x + v + b z=Hx+v+b z=Hx+v+b
���� z z z���Ӿ��۲�����;״̬���� x x x�� n n nά��������; v v v��һ�� m m mά�Ĺ۲���������,���Ӿ�ֵΪ��ĸ�˹�ֲ�,����Э��������ǶԽ��� R R R,��ʾΪ R = �� 2 I m ? n R=\sigma^2I_{m*n} R=��2Im?n?; b b b��һ�� m m mά�Ĺ���ƫ������,������������, b b b��һ��������,���� i i i�������г��ֵ�����ʱ, b b b�еĵ� i i i��Ԫ���Ա�ʾΪ b b b�� - ���Ӿ��۲������仯ʱ,�Ӿ��۲����
��
z
\delta z
��z��ʾΪ:
��
z
=
H
��
x
\delta z=H\delta x
��z=H��x;���,�õ�
z
=
H
x
+
v
+
b
z=Hx+v+b
z=Hx+v+b����С���˽�Ϊ:
�� x = ( H T H ) ? 1 H T �� z \delta x=(H^TH)^{-1}H^T\delta z ��x=(HTH)?1HT��z
�����������������,����״̬���� x x x�����Թ۲�ģ�Ϳɵ�:
�� x = x ^ ? x = H �� z = H �� b \delta x = \hat{x}-x=\bar{H}z=\bar{H}b ��x=x^?x=H��z=H��b
���� H �� = ( H T H ) ? 1 H T \bar{H}=(H^TH)^{-1}H^T H��=(HTH)?1HT - ���ڹ���ƫ������
b
b
b�����ص�
(
x
,
y
)
(x,y)
(x,y)��ÿ������
x
x
x��
y
y
y����Ӱ��,��˹���ƫ�������ڼ������±�ʾΪ:
b
i
=
�O
�O
b
�O
�O
c
o
s
��
b_i=||b||cos\theta
bi?=�O�Ob�O�Ocos����
b
j
=
�O
�O
b
�O
�O
s
i
n
��
b_j=||b||sin\theta
bj?=�O�Ob�O�Osin��;��
b
i
=
�O
�O
b
�O
�O
c
o
s
��
b_i=||b||cos\theta
bi?=�O�Ob�O�Ocos��Ϊ����ƫ������
b
b
b�Է���
x
x
x��Ӱ��,
b
j
=
�O
�O
b
�O
�O
s
i
n
��
b_j=||b||sin\theta
bj?=�O�Ob�O�Osin��Ϊ����ƫ������
b
b
b�Է���
y
y
y��Ӱ��;���,λ�����ķ���Ϊ:
�O
�O
��
x
�O
�O
2
=
(
H
��
b
)
T
H
��
b
||\delta x||^2=(\bar{H}b)^T\bar{H}b
�O�O��x�O�O2=(H��b)TH��b;��Ϊ,
( H �� b ) T H �� b = b T H �� T H �� b = b i b i ( H �� T H �� ) i i + b i b j ( H �� T H �� ) i j + b i b j ( H T H ) j i + b j b j ( H �� T H �� ) j j (\bar{H}b)^T\bar{H}b=b^T\bar{H}^T\bar{H}b=b_ib_i(\bar{H}^T\bar{H})_{ii}+b_ib_j(\bar{H}^T\bar{H})_{ij}+b_ib_j(H^TH)_{ji}+b_jb_j(\bar{H}^T\bar{H})_{jj} (H��b)TH��b=bTH��TH��b=bi?bi?(H��TH��)ii?+bi?bj?(H��TH��)ij?+bi?bj?(HTH)ji?+bj?bj?(H��TH��)jj?
������뼫���깫ʽ,�ɵù���ƫ������ b b b��ˮƽλ������Ӱ�칫ʽΪ:
�� x = ( �O �O b �O �O 2 ( s i n 2 �� ( H �� T H �� ) i i + s i n 2 �� ( H �� T H �� ) i j + c o s 2 �� ( H �� T H �� ) j j ) ) 1 2 \delta x=\big( ||b||^2(sin2\theta(\bar{H}^T\bar{H})_{ii}+sin2\theta(\bar{H}^T\bar{H})_{ij}+cos^2\theta(\bar{H}^T\bar{H})_{jj}) \big)^{\frac{1}{2}} ��x=(�O�Ob�O�O2(sin2��(H��TH��)ii?+sin2��(H��TH��)ij?+cos2��(H��TH��)jj?))21?
���,���,���Ƕ�ֵ �� \theta �������仯ʱ,ˮƽλ�����Ҳ�ᷢ����Ӧ�ı仯,�ر��ǵ��� �� \theta ��ȡһЩ����ĽǶ�ֵʱ,ˮƽλ����� �� x \delta x ��x�Ĺ�ʽ���Լ�
��һ����������ϵ�����λ���̵�������:
- �������Ƕ�λ������
z
=
G
x
z=Gx
z=Gx,����Ӿ�ϵͳ�Ĺ۲����
H
H
H�����ǵĹ۲����
G
G
G�������չ�Ĺ۲����
H
��
H'
H��,�����Ա�ʾΪ,
H �� = [ H G ] H'=\begin{bmatrix} H \\ G \end{bmatrix} H��=[HG?]
H �� H' H����һ�� m �� n m\times n m��n�����Թ۲���� - ��һ���Ӿ�ϵͳ�����������������������ʱ,��������ı任����
M
1
M_1
M1?��
M
2
M_2
M2?��
M
i
M_i
Mi?���Ժϲ���
M
M
M,
M
M
M���Ա�ʾΪ:
M = [ M 1 0 0 0 M 2 0 0 0 M i ] M=\begin{bmatrix} M_1 & 0 & 0\\ 0 & M_2 & 0 \\ 0 & 0 & M_i \end{bmatrix} M=???M1?00?0M2?0?00Mi?????
����,������ˮƽ�ļ��㷽����Ϊ��������:����1������2�ͼ���3������1���ڹ۲���û�й��ϡ�����2�ǹ۲����е������ϡ�����3���ڹ۲��д����������ϡ�
����,�ڼ���1�������,���Ը������ϷŴ�����
K
f
f
K_{ff}
Kff?��ˮƽλ�ñ�����㱣��ˮƽ,�������ϷŴ�����
K
f
f
K_{ff}
Kff?�����ϸ���
P
f
f
P_{ff}
Pff?ȷ�������,���ϱ���ˮƽ�ļ��㹫ʽΪ:
H
P
L
1
=
K
f
f
(
k
)
?
��
x
HPL_1=K_{ff}(k)*\sigma_x
HPL1?=Kff?(k)?��x?
����
K
f
f
K_{ff}
Kff?�����ϷŴ�����,
��
x
\sigma_x
��x?�Ƿɻ�ˮƽ����ı��
�ڼ���2�������,�����Ӿ��۲���ϻ����ǹ۲�����ǿ��ܵġ���ֻ��һ���۲����ʱ,����ƫ������
b
b
b��ֻ����һ��ƫ�����,����ˮƽλ�����
��
x
\delta x
��x���Ա�ʾΪ:
��
x
=
x
^
?
x
=
H
��
z
=
H
��
b
\delta x = \hat{x} - x=\bar{H}z=\bar{H}b
��x=x^?x=H��z=H��b
����
x
^
\hat{x}
x^��ʾ��С���˹���ֵ,
H
=
(
H
T
H
)
?
1
H
T
H=(H^TH)^{-1}H^T
H=(HTH)?1HT��ÿ���۲��б�ʱ�����Ϊ
H
s
l
o
p
e
Hslope
Hslope,��ʾ����:
H
s
o
l
p
e
i
=
��
x
2
D
=
�O
�O
��
x
�O
�O
2
�O
�O
p
�O
�O
2
=
��
x
T
��
x
p
T
p
=
b
T
H
��
T
H
��
b
b
T
P
T
P
b
Hsolpe_i=\frac{\delta x^2}{D}=\frac{||\delta x||^2}{||p||^2}=\frac{\delta x^T\delta x}{p^Tp}=\frac{b^T\bar{H}^T\bar{H}b}{b^TP^TPb}
Hsolpei?=D��x2?=�O�Op�O�O2�O�O��x�O�O2?=pTp��xT��x?=bTPTPbbTH��TH��b?
����
b
T
H
��
T
H
��
b
=
b
i
b
i
(
H
��
T
H
��
)
i
i
+
b
i
b
j
(
H
��
T
H
��
)
i
j
+
b
i
b
j
(
H
��
T
H
��
)
j
i
+
b
j
b
j
(
H
��
T
H
��
)
j
j
b^T\bar{H}^T\bar{H}b=b_ib_i(\bar{H}^T\bar{H})_{ii}+b_ib_j(\bar{H}^T\bar{H})_{ij}+b_ib_j(\bar{H}^T\bar{H})_{ji}+b_jb_j(\bar{H}^T\bar{H})_{jj}
bTH��TH��b=bi?bi?(H��TH��)ii?+bi?bj?(H��TH��)ij?+bi?bj?(H��TH��)ji?+bj?bj?(H��TH��)jj?;
D
D
D��ͳ�Ƽ�����;
p
p
p��ʾ��ż����;
P
P
P��ʾ��ż�任����,
p
=
P
b
p=Pb
p=Pb�����,ˮƽ��λ���ı���ˮƽ
H
P
L
2
HPL_2
HPL2?Ϊ:
H
P
L
2
=
H
s
o
l
p
e
m
a
x
��
s
b
i
a
s
HPL_2=Hsolpe_{max}\times s_{bias}
HPL2?=Hsolpemax?��sbias?
����
s
b
i
a
s
=
��
��
n
?
4
s_{bias}=\sigma \frac{\sqrt{\lambda}}{\sqrt{n-4}}
sbias?=��n?4?��??
����
��
\sigma
������������;
��
\lambda
���Ƿ�ɢ������������ʱ,
H
P
L
2
HPL_2
HPL2?��ֵ��С;���۲��д��ڵ�����ʱ,
H
P
L
2
HPL_2
HPL2?��ֵ�����ӡ�
�ڼ���3�������,�п��������Ӿ��۲ⷢ������,�����������Ƕ�λ�۲ⷢ������,�ֻ���һ���Ӿ��۲ⷢ�����Ϻ�һ�����Ƕ�λ�۲ⷢ�����ϡ��������۲ⷢ������ʱ,��
i
i
i�ι۲�͵�
j
j
j�ι۲�ͬʱ���ϵĹ���ƫ������Ϊ
b
(
i
)
b^{(i)}
b(i)��
b
(
j
)
b^{(j)}
b(j),���Ա�ʾΪ:
b
=
[
0
?
?
?
0
?
b
(
i
)
?
b
(
j
)
?
0
?
?
?
0
]
T
b=[0\ \cdots \ 0 \ b^{(i)} \ b^{(j)} \ 0 \ \cdots \ 0]^T
b=[0???0?b(i)?b(j)?0???0]T
���,��λ�����Ա�ʾ����:
��
=
H
��
b
=
A
b
=
[
b
(
i
)
A
1
i
+
b
(
j
)
A
1
j
b
(
i
)
A
2
i
+
b
(
j
)
A
2
i
b
(
i
)
A
3
i
+
b
(
j
)
A
3
i
b
(
i
)
A
4
i
+
b
(
j
)
A
4
j
]
T
\Delta = \bar{H}b=Ab=[b^{(i)}A_{1i}+b^{(j)}A_{1j}b^{(i)}A_{2i}+b^{(j)}A_{2i}b^{(i)}A_{3i}+b^{(j)}A_{3i}b^{(i)}A_{4i}+b^{(j)}A_{4j}]^T
��=H��b=Ab=[b(i)A1i?+b(j)A1j?b(i)A2i?+b(j)A2i?b(i)A3i?+b(j)A3i?b(i)A4i?+b(j)A4j?]T
ˮƽ��λ����ʾ����:
��
x
2
=
(
b
(
i
)
A
1
i
+
b
(
j
)
A
1
j
)
2
+
(
b
(
i
)
A
2
i
+
b
(
j
)
A
2
j
)
2
\delta x^2=(b^{(i)}A_{1i}+b^{(j)}A_{1j})^2+(b^{(i)}A_{2i}+b^{(j)}A_{2j})^2
��x2=(b(i)A1i?+b(j)A1j?)2+(b(i)A2i?+b(j)A2j?)2
���,б�ʼ��㹫ʽ
H
s
l
o
p
e
Hslope
HslopeΪ:
H
s
l
o
p
e
i
=
��
x
2
D
=
�O
�O
��
x
�O
�O
2
�O
�O
p
�O
�O
2
=
��
x
T
��
x
p
T
p
=
(
b
(
i
)
A
1
i
+
b
(
j
)
A
1
j
)
2
+
(
b
(
i
)
A
2
i
+
b
(
j
)
A
2
j
)
2
b
T
P
T
P
b
Hslope_i=\frac{\delta x^2}{D}=\frac{||\delta x||^2}{||p||^2}=\frac{\delta x^T\delta x}{p^Tp}=\frac{(b^{(i)}A_{1i}+b^{(j)}A_{1j})^2+(b^{(i)}A_{2i}+b^{(j)}A_{2j})^2}{b^TP^TPb}
Hslopei?=D��x2?=�O�Op�O�O2�O�O��x�O�O2?=pTp��xT��x?=bTPTPb(b(i)A1i?+b(j)A1j?)2+(b(i)A2i?+b(j)A2j?)2?
���,����
H
P
L
3
HPL_3
HPL3?�Ĺ�ʽ����:
H
P
L
3
=
H
s
l
o
p
e
m
a
x
��
s
b
i
a
s
HPL_3=Hslope_{max}\times s_{bias}
HPL3?=Hslopemax?��sbias?
������1������2�ͼ���3�������,����������µ��������ڱ���ˮƽ��,�õ��ܱ���ˮƽ�ļ��㹫ʽ����:
H
P
L
=
m
a
x
(
H
P
L
1
,
H
P
L
2
)
2
+
H
P
L
3
2
HPL=\sqrt{max(HPL_1,HPL_2)^2+HPL_3^2}
HPL=max(HPL1?,HPL2?)2+HPL32??
����,��
m
m
m��·�����Ӿ���������
z
m
(
t
i
)
=
T
c
p
i
x
s
��
m
c
(
t
i
)
+
v
(
t
i
)
z_m(t_i)=T_c^{pix}\underline{s}_m^c(t_i)+v(t_i)
zm?(ti?)=Tcpix?s?mc?(ti?)+v(ti?)Ҳ��Ϊα���붨λ���̡�
�����м������,������������������Ч�����������ṩһ���Ӿ���������Լ��ļ��㷽������Բ�ͬ��ʵ�����,����˺��ʵ��Ӿ���λ����ģ�ͺ���ѧ�㷨,�ḻ�˵����۲�����,����˶�λ���Ⱥ�����Լ�����ܡ���������м�������������֤���ӻ�������������Ƕ�λ�Ŀ����Զ���������������㷨���ܲ����ȱ�㡣
3 ͼ�ļ�Ҫ˵��
Ϊ��ʹ�����������ݸ���������,������ձ������ľ���ʵʩ�����丽ͼ��һ����ϸ��������������ͼ1�DZ�ʵ�����Ӿ�����Լ�������ͼ��ͼ2��ʾ�˱�ʵ�����˹�Ŀ��Ķ�λģ�͡�ͼ3��ʾ�˱�ʵ���л����ܵ��Ķ�λģ�͡�ͼ4�DZ�ʵ���б���ˮƽ���������ͼ��
4 ��ϸ����
��������Ŀ������Լ�����ʵ����ЩĿ����ܵķ���������ʵ�����Բ�����Ȼ��,������������������������ʵ�����������Բ�ͬ����ʽʵʩ����˵����ı��ʽ����ǰ���������ļ�����Աȫ������Ȿ�����ľ���ϸ�ڡ�
���潫���ո�ͼ������������ʵ������ͼֽ��,��ͬ�IJο����ִ�����ͬ�����ƵIJ���,����ͬ�����ƵIJ��衣����ͨ������ʵ��������һ�ָ��ݱ��������Ӿ���������Լ��ļ��㷽����
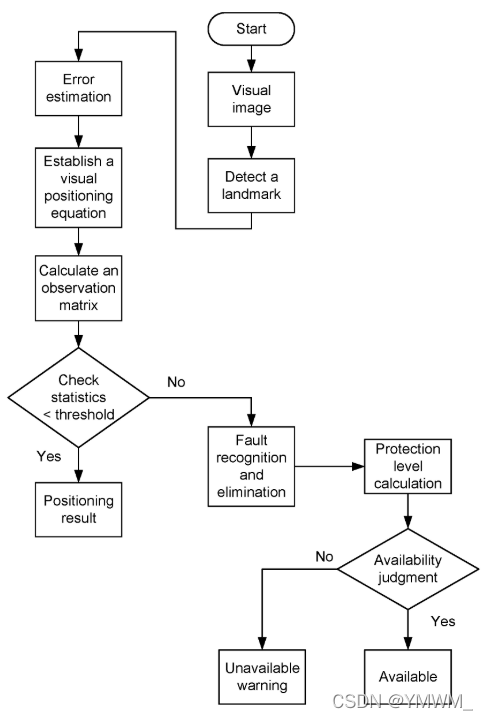
�÷���ͨ�������Ӿ�������½ϵͳ���Ӿ��۲�����ߵ�������Լ������ܡ���ͼ1��ʾ,�DZ�ʵ�����Ӿ�����Լ�������ͼ������,�������������ͼ�����ͼ��Ԥ����,��Ⲣ����������½·����ͼ��,�����Ӿ�ϵͳ�Ķ�λ�����,Ϊ�˱�֤��λ����,����ϵͳ������������,��Ҫ���������������ơ�Ȼ��,ͨ�������Ӿ���λ����,�õ��Ӿ��۲�ģ��,������۲����,��һ������ɻ���λ�ú���̬��Ϣ�������й��ϼ����ų�,������ͳ����С����ֵʱ,ϵͳû�з�������,����ֱ�������λ���������,������ͳ�������ڻ���ڸ���ֵʱ,��ʾϵͳ��������,�����ų�����,���ֱ���㲻ͬ��������µı���ˮƽ,��һ���ж�ϵͳ�Ŀ����ԡ�
�÷����������¾��岽��:
(1)���ݾ�����Ӿ���λ�����������ʵ��Ӿ���λģ��,������Ӿ���λ������
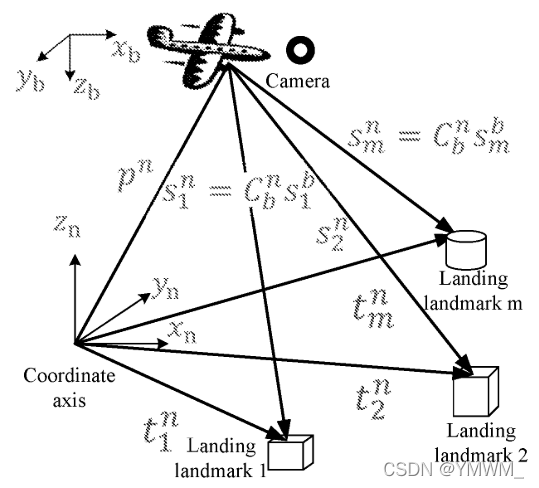
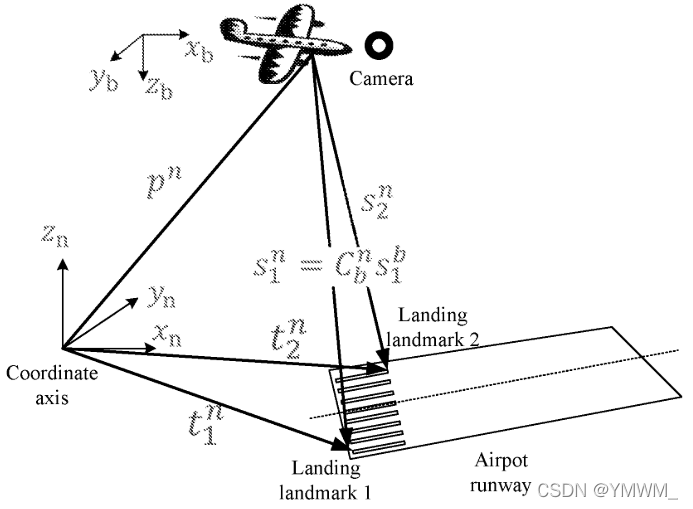
ͨ���Էɻ��Ӿ���½�������о�,���Խ��Ӿ���λģ����Ϊ���ֳ�������һ�ֳ�����,ʹ�þ��������������˹�Ŀ����Ϊ��½��־,�硰H����I����־,��ͼ2��ʾ���ڵڶ��ֳ�����,���û������������Ļ����ܵ��ȸ���,�Ա�����ܹ��ɿ���ʶ������ܵ�Ŀ��,��ͼ3��ʾ��
��ͼ2��ͼ3��ʾ,��һ����������ϵ��,�����������,�õ�һ��������λ������
p
n
p^n
pn,����ͻ���֮���С�Ƕ�ƫ������
q
n
q^n
qn,��������
s
m
n
s_m^n
smn?,��������Ի����½·������
t
m
n
t_m^n
tmn?,���¹�ʽ������:
t
m
n
=
s
m
n
+
p
n
+
q
n
t_m^n=s_m^n+p^n+q^n
tmn?=smn?+pn+qn
���,�����ϵ��·������������
s
m
c
s_m^c
smc?,����ϵ�������λ��
q
b
=
[
x
1
?
y
2
?
z
3
]
q^b=[x_1\ y_2\ z_3]
qb=[x1??y2??z3?]����½·����λ������
t
m
n
=
[
x
2
?
y
2
?
z
2
]
T
t_m^n=[x_2\ y_2\ z_2]^T
tmn?=[x2??y2??z2?]T��֪ʱ,����ͨ�������÷ɻ�����ά�����е�λ��
p
n
=
[
x
3
?
y
3
?
z
3
]
T
p^n=[x_3\ y_3\ z_3]^T
pn=[x3??y3??z3?]T������
p
n
p^n
pn��ʾ�ɻ��ڵ���ϵ�µ�λ������;
t
m
n
t_m^n
tmn?��ʾ��
m
m
m��·����ڵ���ϵ�µ�λ������;
C
b
n
C_b^n
Cbn?��ʾ����ϵ������ϵ�ķ������Ҿ���;
s
m
n
s_m^n
smn?��ʾ��
m
m
m��Ŀ���ڵ���ϵ�е���������;
s
m
b
s_m^b
smb?��ʾ��
m
m
m��Ŀ���ڻ���ϵ�µ���������,
s
m
n
=
C
b
n
s
m
b
s_m^n=C_b^ns_m^b
smn?=Cbn?smb?;
q
n
q^n
qn��ʾ������ĵ��ɻ�����֮��ľ���;
q
b
q^b
qb��ʾ����ڻ���ϵ�µ�λ��,�����ͨ���궨��á�
(2)�����Ӿ�ϵͳ�������,���������״̬������
����ϵͳ�������ײ������,�����Ҫ���Ӿ������������й��ƺ�У��,�Լ����Ӿ��۲���������Ի�����Ӱ�졣����������ѧ���������״̬�������Ա�ʾΪ:
��
x
=
[
��
p
n
?
��
t
m
n
]
\delta x = [\beta p^n \ \delta t_m^n]
��x=[��pn?��tmn?]
����
��
p
n
\delta p^n
��pn�Ƿɻ�λ�õ���ά�������,���Ա�ʾΪ:
��
p
n
=
p
~
n
?
p
n
\delta p^n=\tilde{p}^n-p^n
��pn=p~?n?pn
��
t
m
n
\delta t_m^n
��tmn?��·���λ�����,���Ա�ʾΪ:
��
t
m
n
=
t
^
m
n
?
t
m
n
\delta t_m^n=\hat{t}_m^n-t_m^n
��tmn?=t^mn??tmn?
���б��ֵ�ò����߱�ʾ��
��Ҫע�����,��һ����½·�������뿪�����Ұʱ,·�������ʵ���ϻ�����ʱ����仯,��������һ�����������·���������,�Ա��ּ���Ч�ʡ�
(3)�����Ӿ��۲�ģ��,�����Ӿ�ϵͳ�۲����H��
��ͼ2��ʾ,��
m
m
m��·�����Ӿ��۲ⷽ�̿��Ա�ʾΪ:
z
m
(
t
i
)
=
T
c
p
i
x
s
��
m
c
(
t
i
)
+
v
(
t
i
)
z_m(t_i)=T_c^{pix}\underline{s}_m^c(t_i)+v(t_i)
zm?(ti?)=Tcpix?s?mc?(ti?)+v(ti?)
�ù�ʽҲ��Ϊα���붨λ����,�ǻ�����½·���Ͷ�Ӧͼ���е�һ�����ص�õ��ġ�����
z
m
(
t
i
)
z_m(t_i)
zm?(ti?)����½·���
m
m
m�������;
T
c
p
i
x
T_c^{pix}
Tcpix?����������ϵ���������ϵ֮��ı任����;
s
m
c
s_m^c
smc?��ʾ����λ�ö�Ӧ�ڴ�������������������������;
s
m
z
c
s_{m_z}^c
smz?c?�������
s
z
s_z
sz?�����ϵ����ĵľ���;
s
��
m
c
(
t
i
)
\underline{s}_m^c(t_i)
s?mc?(ti?)�������Ŀ��
m
m
m�����������Ĺ�һ����ʽ;
v
(
t
i
)
v(t_i)
v(ti?)�Ƕ������Ը�˹������,���ֵΪ0,����Ϊ
R
R
R,���������·���:
E
[
v
(
t
i
)
v
t
(
t
j
)
]
=
{
R
,
??
t
i
=
t
j
0
,
???
t
i
��
t
j
E[v(t_i)v^t(t_j)]=\begin{cases} R, \ \ t_i=t_j \\ 0, \ \ \ t_i \neq t_j \end{cases}
E[v(ti?)vt(tj?)]={R,??ti?=tj?0,???ti?��?=tj??
T
p
i
x
c
T_{pix}^c
Tpixc?����֪��,����һ����
H
H
H��
W
W
W�ľ�����������
(
M
��
N
)
(M\times N)
(M��N)��,��������ϵ���������ı任��ϵΪ
T
c
p
i
x
T_c^{pix}
Tcpix?,���������¹�ʽ:
T
p
i
x
c
=
[
?
H
f
M
0
H
(
M
+
1
)
2
f
M
0
W
f
N
?
W
(
N
+
1
)
2
f
N
0
0
1
]
=
(
T
c
p
i
x
)
?
1
T_{pix}^c=\begin{bmatrix} -\frac{H}{fM} & 0 & \frac{H(M+1)}{2fM} \\ 0 & \frac{W}{fN} & -\frac{W(N+1)}{2fN} \\ 0 & 0 & 1 \end{bmatrix}=(T_c^{pix})^{-1}
Tpixc?=?????fMH?00?0fNW?0?2fMH(M+1)??2fNW(N+1)?1?????=(Tcpix?)?1
Ϊ�˱��ڼ���,�Է����Է���
z
m
(
t
i
)
=
T
c
p
i
x
s
��
m
c
(
t
i
)
+
v
(
t
i
)
z_m(t_i)=T_c^{pix}\underline{s}_m^c(t_i)+v(t_i)
zm?(ti?)=Tcpix?s?mc?(ti?)+v(ti?)���������Ի�,һ�������Ժ�������Ϊ
h
[
x
(
t
i
)
]
=
T
c
p
i
x
s
��
m
c
(
t
i
)
h[x(t_i)]=T_c^{pix}\underline{s}_m^c(t_i)
h[x(ti?)]=Tcpix?s?mc?(ti?),������һ��̩�ռ���չ��ʽ,�õ��Ӿ�ϵͳ�۲����
H
H
H,����
H
H
H�е�Ԫ������ʽ�����ƫ��������:
H
=
[
?
h
?
p
n
?
0
]
H=[\frac{\partial h}{\partial p^n} \ 0]
H=[?pn?h??0]
��Ϊ,
q
n
=
C
b
n
C
c
b
s
m
c
+
C
b
n
q
d
=
C
b
n
(
C
c
b
s
m
c
+
q
d
)
q^n=C_b^nC_c^bs_m^c+C_b^nq^d=C_b^n(C_c^bs_m^c+q^d)
qn=Cbn?Ccb?smc?+Cbn?qd=Cbn?(Ccb?smc?+qd)
h
h
h�����
p
n
p^n
pn��ƫ����Ϊ:
?
h
?
p
n
=
1
s
m
z
c
T
c
p
i
x
(
s
m
c
C
n
b
C
b
c
?
C
n
b
C
b
c
)
\frac{\partial h}{\partial p^n}=\frac{1}{s_{m_z}^c}T_c^{pix}(s_m^cC_n^bC_b^c-C_n^bC_b^c)
?pn?h?=smz?c?1?Tcpix?(smc?Cnb?Cbc??Cnb?Cbc?)
��Ϊ
H
H
H��
t
m
n
t_m^n
tmn?��,
H
H
H��
��
t
m
n
\delta t_m^n
��tmn?��ƫ����Ϊ�㡣
(4)����״̬����
x
x
x���Ӿ��۲�ģ��,��ʾΪ:
z
=
H
x
+
v
+
b
z = Hx+v+b
z=Hx+v+b
����
z
z
z���Ӿ��۲�����;״̬����
x
x
x��
n
n
n������;
v
v
v��
m
m
mά�۲���������,���������ֵЭ����Ϊ
R
R
R�ĸ�˹�ֲ�,��ʾΪ
R
=
��
2
I
m
?
m
R=\sigma^2I_{m*m}
R=��2Im?m?;
b
b
b��
m
m
mά����ƫ������,�����������,
b
b
b��һ��������,����
i
i
i��������������ʱ,
b
b
b�е�
i
i
i��Ԫ����Ȼ��ʾΪ
b
b
b��
���Ӿ��۲������仯ʱ,�Ӿ��۲�����ʾΪ:
��
z
=
H
��
x
\delta z=H \delta x
��z=H��x
���,����
z
=
H
x
+
v
+
b
z=Hx+v+b
z=Hx+v+b����С���˽�Ϊ,
��
x
=
(
H
T
H
)
?
1
H
T
��
z
\delta x =(H^TH)^{-1}H^T\delta z
��x=(HTH)?1HT��z
�����������������,����״̬����
x
x
x�����Թ۲�ģ�Ϳɵ�,
��
x
=
x
^
?
x
=
H
��
z
=
H
��
b
\delta x=\hat{x}-x=\bar{H}z=\bar{H}b
��x=x^?x=H��z=H��b
����
H
��
=
(
H
T
H
)
?
1
H
T
\bar{H}=(H^TH)^{-1}H^T
H��=(HTH)?1HT��
���ڹ���ƫ������
b
b
b�����ص�
(
x
,
y
)
(x,y)
(x,y)��ÿ������
x
x
x��
y
y
y����Ӱ��,��˹���ƫ������
b
b
b�ڼ������±�ʾΪ:
b
i
=
�O
�O
b
�O
�O
c
o
s
��
b_i=||b||cos\theta
bi?=�O�Ob�O�Ocos��
b j = �O �O b �O �O s i n �� b_j=||b||sin\theta bj?=�O�Ob�O�Osin��
���� b i = �O �O b �O �O c o s �� b_i=||b||cos\theta bi?=�O�Ob�O�Ocos���ǹ���ƫ������ b b b�Է��� x x x��Ӱ��; b j = �O �O b �O �O s i n �� b_j=||b||sin\theta bj?=�O�Ob�O�Osin���ǹ���ƫ������ b b b�Է��� y y y��Ӱ�졣
���,λ�����ķ�����ʾΪ:
�O
�O
��
x
�O
�O
2
=
(
H
��
b
)
T
H
��
b
||\delta x||^2=(\bar{H}b)^T\bar{H}b
�O�O��x�O�O2=(H��b)TH��b
�������¹�ʽ:
(
H
��
b
)
T
H
��
b
=
b
T
H
��
T
H
��
b
=
b
i
b
i
(
H
��
T
H
��
)
i
i
+
b
i
b
j
(
H
��
T
H
��
)
i
j
+
b
i
b
j
(
H
T
H
)
j
i
+
b
j
b
j
(
H
��
T
H
��
)
j
j
(\bar{H}b)^T\bar{H}b=b^T\bar{H}^T\bar{H}b=b_ib_i(\bar{H}^T\bar{H})_{ii}+b_ib_j(\bar{H}^T\bar{H})_{ij}+b_ib_j(H^TH)_{ji}+b_jb_j(\bar{H}^T\bar{H})_{jj}
(H��b)TH��b=bTH��TH��b=bi?bi?(H��TH��)ii?+bi?bj?(H��TH��)ij?+bi?bj?(HTH)ji?+bj?bj?(H��TH��)jj?
������뼫���깫ʽ,�ɵõ�����ƫ������
b
b
b��ˮƽλ������Ӱ�칫ʽ,���幫ʽ����:
��
x
=
(
�O
�O
b
�O
�O
2
(
s
i
n
2
��
(
H
��
T
H
��
)
i
i
+
s
i
n
2
��
(
H
��
T
H
��
)
i
j
+
c
o
s
2
��
(
H
��
T
H
��
)
j
j
)
)
1
2
\delta x=(||b||^2(sin^2\theta(\bar{H}^T\bar{H})_{ii}+sin2\theta(\bar{H}^T\bar{H})_{ij}+cos^2\theta(\bar{H}^T\bar{H})_{jj}))^{\frac{1}{2}}
��x=(�O�Ob�O�O2(sin2��(H��TH��)ii?+sin2��(H��TH��)ij?+cos2��(H��TH��)jj?))21?
���,���Ƕ�ֵ
��
\theta
�������仯ʱ,ˮƽλ�����Ҳ�ᷢ����Ӧ�ı仯,�ر��ǵ�ȡһЩ����ĽǶ�ֵʱ,ˮƽλ�����
��
x
\delta x
��x��ʽ���Լ�
(5)����Ӿ�ϵͳ�۲ⷽ�̺����Ƕ�λ����,������ϵ�����λ���̡�
�������Ƕ�λ����Ϊ
z
=
G
x
z=Gx
z=Gx,�ϲ��Ӿ�ϵͳ�۲����
H
H
H�����ǹ۲����
G
G
G���Ի����չ�۲����
H
��
H'
H��,��ʾ����:
H
��
=
[
H
G
]
H'=\begin{bmatrix} H \\ G \end{bmatrix}
H��=[HG?]
����
H
��
H'
H����
m
��
n
m\times n
m��n�����Թ۲����
����Ȼ���������������ǿ���ʱ,���������������������ǹ۲�����ǿ�Ӿ������豸������Ӿ�ϵͳ�������������������ɵ�ϵͳ,���Ӿ�ϵͳ�е�����ͷ�������ı任����
M
1
M_1
M1?��
M
2
M_2
M2?��
M
i
M_i
Mi?�������Ϊ
M
M
M,
M
M
M���Ծ����ʾΪ:
M
=
[
M
1
0
0
0
M
2
0
0
0
M
i
]
M=\begin{bmatrix} M_1 & 0 & 0\\ 0 & M_2 & 0 \\ 0 & 0 & M_i \end{bmatrix}
M=???M1?00?0M2?0?00Mi?????
(6)�ڲ�ͬ�Ĺ���ģʽ�¼��㱣��ˮƽ��
����ˮƽ�ļ��㷽����Ϊ��������:����1������2�ͼ���3��
����1Ϊ�۲����ϵ����,��ʱ����ˮƽ�ɸ������ϷŴ�����
K
f
f
K_{ff}
Kff?��ˮƽλ�ñ���
��
x
\sigma_x
��x?����,�������ϷŴ�����
K
f
f
K_{ff}
Kff?�����ϸ���
P
f
f
P_{ff}
Pff?ȷ�������,���ϱ���ˮƽ�ļ��㹫ʽΪ:
H
P
L
1
=
K
f
f
(
k
)
?
��
x
HPL_1=K_{ff}(k)*\sigma_x
HPL1?=Kff?(k)?��x?
����
H
P
L
1
HPL_1
HPL1?��ʾ��������µı���ˮƽ;
K
f
f
K_{ff}
Kff?�����ϷŴ�����;
��
x
\sigma_x
��x?�Ƿɻ���ˮƽ�����ϵı��
����2�ǹ۲��г��ֵ����ϵ����,�����������,�����Ӿ��۲��GNSS�۲ⶼ�п��ܷ������ϡ���ֻ��һ���۲����ʱ,����ƫ������
b
b
b��ֻ����һ��ƫ�����,��ʱˮƽλ�����
��
x
\delta x
��x�ɱ�ʾΪ:
��
x
=
x
^
?
x
=
H
��
z
=
H
��
b
\delta x=\hat{x}-x=\bar{H}z=\bar{H}b
��x=x^?x=H��z=H��b
����
x
^
\hat{x}
x^��ʾ��С���˹���ֵ,
H
��
=
(
H
T
H
)
?
1
H
T
\bar{H}=(H^TH)^{-1}H^T
H��=(HTH)?1HT��ÿ���۲��б����Ϊ
H
s
l
o
p
e
Hslope
Hslope,��ʾΪ:
H
s
l
o
p
e
i
=
��
x
2
D
=
�O
�O
��
x
�O
�O
2
�O
�O
p
�O
�O
2
=
��
x
T
��
x
p
T
p
=
b
T
H
��
T
H
��
b
b
T
P
T
P
b
Hslope_i=\frac{\delta x^2}{D}=\frac{||\delta x||^2}{||p||^2}=\frac{\delta x^T \delta x}{p^Tp}=\frac{b^T\bar{H}^T\bar{H}b}{b^TP^TPb}
Hslopei?=D��x2?=�O�Op�O�O2�O�O��x�O�O2?=pTp��xT��x?=bTPTPbbTH��TH��b?
����
b
T
H
��
T
H
��
b
=
b
i
b
i
(
H
��
T
H
��
)
i
i
+
b
i
b
j
(
H
��
T
H
��
)
i
j
+
b
i
b
j
(
H
��
T
H
��
)
j
i
+
b
j
b
j
(
H
��
T
H
��
)
j
j
b^T\bar{H}^T\bar{H}b=b_ib_i(\bar{H}^T\bar{H})_{ii}+b_ib_j(\bar{H}^T\bar{H})_{ij}+b_ib_j(\bar{H}^T\bar{H})_{ji}+b_jb_j(\bar{H}^T\bar{H})_{jj}
bTH��TH��b=bi?bi?(H��TH��)ii?+bi?bj?(H��TH��)ij?+bi?bj?(H��TH��)ji?+bj?bj?(H��TH��)jj?;
D
D
D��ͳ�Ƽ�����;
p
p
p����ż����;
P
P
P����ż�任����,
p
=
P
b
p=Pb
p=Pb�����,ˮƽ��λ����ˮƽ
H
P
L
2
HPL_2
HPL2?Ϊ:
H
P
L
2
=
H
s
l
o
p
e
m
a
x
��
s
b
i
a
s
HPL_2=Hslope_{max}\times s_{bias}
HPL2?=Hslopemax?��sbias?
����
s
b
i
a
s
=
��
��
n
?
4
s_{bias}=\sigma \frac{\sqrt{\lambda}}{\sqrt{n-4}}
sbias?=��n?4?��??
��
\sigma
������������,����һ���ֲ�������������ʱ,
H
P
L
2
HPL_2
HPL2?��ֵ��С;���۲��г��ֵ�����ʱ,
H
P
L
2
HPL_2
HPL2?��ֵ�����ӡ�
����3Ϊ�۲�����������ϵ����,���������Ӿ��۲���ϡ�����GNSS�۲���ϻ�һ���Ӿ��۲��һ��GNSS�۲���ϵ�������������۲����ʱ,��
i
i
i���۲����
j
j
j���۲�ͬʱ���ϵĹ���ƫ������Ϊ
b
(
i
)
b(i)
b(i)��
b
(
j
)
b(j)
b(j),�ɱ�ʾΪ:
b
=
[
0
?
?
?
0
?
b
(
i
)
?
b
(
j
)
?
?
?
0
?
0
?
?
0
]
T
b=[0\ \cdots \ 0\ b^{(i)} \ b^{(j)} \ \cdots \ 0\ 0 \cdots \ 0] ^T
b=[0???0?b(i)?b(j)???0?0??0]T
���,��λ����ʾ����:
��
=
H
��
b
=
A
b
=
[
b
(
i
)
A
1
i
+
b
(
j
)
A
1
j
b
(
i
)
A
2
i
+
b
(
j
)
A
2
i
b
(
i
)
A
3
i
+
b
(
j
)
A
3
i
b
(
i
)
A
4
i
+
b
(
j
)
A
4
j
]
T
\Delta=\bar{H}b=Ab=[b^{(i)}A_{1i}+b^{(j)}A_{1j}b^{(i)}A_{2i}+b^{(j)}A_{2i}b^{(i)}A_{3i}+b^{(j)}A_{3i}b^{(i)}A_{4i}+b^{(j)}A_{4j}]^T
��=H��b=Ab=[b(i)A1i?+b(j)A1j?b(i)A2i?+b(j)A2i?b(i)A3i?+b(j)A3i?b(i)A4i?+b(j)A4j?]T
ˮƽ��λ����ʾ����:
��
x
2
=
(
b
(
i
)
A
1
i
+
b
(
j
)
A
1
j
)
2
+
(
b
(
i
)
A
2
i
+
b
(
j
)
A
2
j
)
2
\delta x^2=(b^{(i)}A_{1i}+b^{(j)}A_{1j})^2+(b^{(i)}A_{2i}+b^{(j)}A_{2j})^2
��x2=(b(i)A1i?+b(j)A1j?)2+(b(i)A2i?+b(j)A2j?)2
���,����
H
s
l
o
p
e
Hslope
Hslope����:
H
s
l
o
p
e
i
=
��
x
2
D
=
�O
�O
��
x
�O
�O
2
�O
�O
p
�O
�O
2
=
��
x
T
��
x
p
T
p
=
(
b
(
i
)
A
1
i
+
b
(
j
)
A
1
j
)
2
+
(
b
(
i
)
A
2
i
+
b
(
j
)
A
2
j
)
2
b
T
P
T
P
b
Hslope_i=\frac{\delta x^2}{D}=\frac{||\delta x||^2}{||p||^2}=\frac{\delta x^T \delta x}{p^Tp}=\frac{(b^{(i)}A_{1i}+b^{(j)}A_{1j})^2+(b^{(i)}A_{2i}+b^{(j)}A_{2j})^2}{b^TP^TPb}
Hslopei?=D��x2?=�O�Op�O�O2�O�O��x�O�O2?=pTp��xT��x?=bTPTPb(b(i)A1i?+b(j)A1j?)2+(b(i)A2i?+b(j)A2j?)2?
���,����
H
P
L
3
HPL_3
HPL3?�Ĺ�ʽ����:
H
P
L
3
=
H
s
l
o
p
e
m
a
x
��
s
b
i
a
s
HPL_3=Hslope_{max}\times s_{bias}
HPL3?=Hslopemax?��sbias?
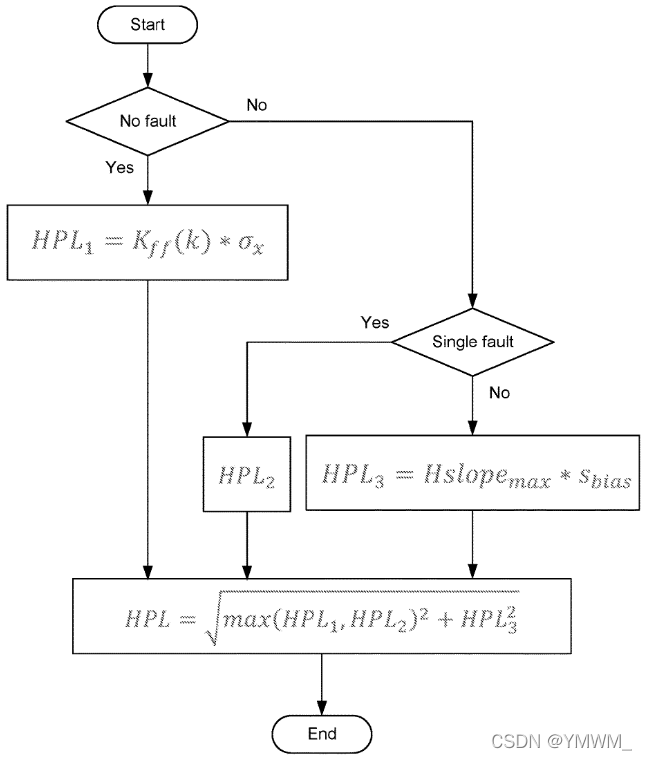
��ϼ���1������2�ͼ���3,��������µ�����ڱ���ˮƽ�ж�������,���㱣��ˮƽ�Ĺ�ʽ����,
H
P
L
=
m
a
x
(
H
P
L
1
,
H
P
L
2
)
2
+
H
P
L
3
2
HPL=\sqrt{max(HPL_1,HPL_2)^2+HPL_3^2}
HPL=max(HPL1?,HPL2?)2+HPL32??
�����������,����ˮƽ��ֵԽȷ,�ڸ�������ֵ�������,�û�Խ�ܱ�������ƫ��,ϵͳ������Ҳ��Խ�ߡ����ݱ�ʵ��,ͨ����������Ӿ���������Լ���㷨,������Ч���ų�����,�Ӷ���ߵ�����λ��ȷ�ԺͿ����ԡ�����ʵ���������������˵����ʾ��,�����Ƕ�ʵ�ַ�ʽ�����ơ���Щ����һ�㼼�ܵ���Ҳ���������������Ļ���������������ͬ��ʽ�ĸı䡣û�б�ҪҲû�а취�þ����е�ʵ�ַ�ʽ���䷢���ı仯����,���ڱ������ı�����Χ�ڡ�
������������ʵ�����Ժ����ؽ�ϱ�������������ʵ�������������еļ�����Ա���⡣��������ʵ��������Ϊ��ʾ���Ե�,��������������Χ��������Ȩ��Ҫ���鶨�塣

