����Բ���˶�-Ŀ���˶�ģ��/����Ŀ�����
ԭ������,·���ĸ�λ����������
WX: ZB823618313
����Բ���˶�
1. �Ի���Ŀ����ٵ�����
??����Ŀ�����һֱ��Ŀ����������о����ѵ���ص����⡣����Ŀ���˶�ģ�ͺ��˲��㷨��Ŀ����ٵ�������Ҫ���ء�����Ŀ��Ļ������в���Ԥ����,ʹ�����Ǻ��ѽ�����ȷ��Ŀ���˶�ģ�͡���ν���һ����Ч��ģ������ӳĿ����ʵ���˶��켣�Ǹ���Ŀ�����ϵͳ�����������⡣��������ʮ����о�,������ȡ����������Ҫ�ɹ���
��������:����Ŀ�����ӵ����Ҫ��:
������Ŀ�꽨ģ(Ҳ�DZ������ص�)
����������(��һ�����ͽ���)
�˲������(��Ŀ�����ר��)
??���㷨����,��Ŀ�����ϵͳ��,���õ��˲��㷨���Կ������˲���Ϊ������ܵĹ����㷨���������˲�����һ�����ԡ���ƫ��������������СΪ������Ź����㷨,���о�ȷ����ѧ��ʽ��������ʹ��Ч�ܡ��������˲�����ʵ������һ�����ݴ�������,�����õ����˲�����,���ݻ�ȡ�����������ɵ��Ʒ��̵��Ƹ����µ�״̬���ơ����ڼ������ʹ洢��С,�Ƚ���������ʵʱ�����Ҫ��,�ڹ���ʵ���еõ��㷺Ӧ�á�
??����֮��,�������˲�Ҳ�㷺Ӧ�������Ŀ�����,����:
��չ�������˲�EKF
���������˲�UKF
�ݻ��������˲�CKF
����������˲�QKF
���IJ�ֿ������˲�CDKF
Divided difference filter DDF
��˹����˲�GSF
ǿ�����˲�STF
�����˲�PF
�� ��
2. Ŀ��ģ����
??����Ŀ��ģ��������Ŀ��״̬����ʱ��仯�Ĺ��̡�һ���õ�ģ�͵ֵ��ϴ��������ݡ���ǰ�������е�Ŀ������㷨���ǻ���ģ�ͽ���״̬���Ƶġ��ڿ������˲���������Ŀ����������,����״̬�ռ�Ļ���Ŀ�꽨ģ��Ϊ��Ҫ�о�����֮һ��
Ŀ��Ŀռ��˶����ڲ�ͬ���˶��켣������ϵ
һά�˶�
��ά�˶�
��ά�˶����ݲ�ͬ������˶��Ƿ����
����䲻���ģ��
��������ģ��
����䲻���ģ��: ����ģ�ͼ�����ά�ռ��������������ϵ�Ŀ��������̲���ϡ�Ŀ������Ƿ������ܵ��������ö�ʹ�ü��ٶȱ仯����,���ԶԻ�����ģ���ѵ����ڶ�Ŀ����ٶȵ���������������Ŀ��,����(Constant Velocity,CV��ģ�ͳ�������������Ŀ����˶�,�������ٶ�(Constant Acceleration,CA)ģ���������������ٶ����������Ļ���Ŀ����˶���
��������Ҫ�������ģ��:
��������ģ��: ��������ģ�;�����������ָ����ת���˶�ģ�͡����ڴ���ģ���������������,���Կ��Է�Ϊ����:��άת��ģ�ͺ���άת��ģ�͡���άת��ģ���ֳ�Ϊƽ��ת��ģ��,��CTģ�͡�
�����ά�ȼ����˶�CAģ��:
3. ����Բ���˶�CT
CT�˶�ģ��������ģ��Ŀ����н��ٶ� �� ( t ) \Omega(t) ��(t)�㶨��ת���˶�ʱ���˶�ģ�͡���CTģ�����Ӧ��״̬����Ϊ
X = [ x , x �B , y , y �B , , �� ( t ) ] T {X}=[x, \dot{x}, y, \dot{y},,\Omega(t)]^T X=[x,x�B,y,y�B?,,��(t)]T
ʽ��, y ( t ) y(t) y(t)�� y �B ( t ) \dot{y}(t) y�B?(t)���� x x x��ֱ�����ϵ��ٶȺͼ��ٶȡ���������ٶ� �� ( t ) \Omega(t) ��(t)��һ��ʱ������Ǻ㶨��,���ת��ģ��Ϊ����ת��ģ��,����ת��ģ���и�����������:
�� �� ( t ) \Omega(t) ��(t)��֪��,CTģ��������ģ��,��֮��� �� ( t ) \Omega(t) ��(t)δ֪,��Ϊ������ģ��
������Ҫ�ձ�Ӧ�õĽ��ٶ���֪������ת��ģ��
3.1 ����Բ���˶�CTģ��(����)
Ŀ��״̬Ϊ:xάλ�ú��ٶȼ��ٶȡ�yάλ���ٶȼ��ٶȡ��� X = [ x , x �B , y , y �B ] T {X}=[x, \dot{x},y, \dot{y}]^T X=[x,x�B,y,y�B?]T
CTģ��Ϊ:
X
�B
(
t
)
=
[
0
1
0
0
0
0
0
?
��
0
0
0
1
0
��
0
0
]
X
(
t
)
+
[
0
0
1
0
0
0
0
1
]
W
(
t
)
\dot{X}(t)=\begin{bmatrix}0&1&0&0\\0&0&0&-\omega\\0&0&0&1\\0&\omega&0&0 \end{bmatrix}X(t) + \begin{bmatrix}0&0\\1&0\\0&0\\0&1\end{bmatrix}W(t)
X�B(t)=?????0000?100��?0000?0?��10??????X(t)+?????0100?0001??????W(t)
3.2 ����Բ���˶�CTģ��(��ɢ)
��ɢ������ģ��:
X k + 1 = [ 1 sin ? ( �� T ) �� 0 ? 1 ? cos ? ( �� T ) �� 0 cos ? ( �� T ) 0 ? sin ? ( �� T ) 0 1 ? cos ? ( �� T ) �� 1 sin ? ( �� T ) �� 0 sin ? ( �� T ) 0 cos ? ( �� T ) ] X k + [ T 2 / 2 0 T 0 0 T 2 / 2 0 T ] W k X_{k+1}=\begin{bmatrix}1&\frac{\sin(\omega T)}{\omega}&0&-\frac{1-\cos(\omega T)}{\omega}\\0&\cos(\omega T)&0&-\sin(\omega T)\\0&\frac{1-\cos(\omega T)}{\omega}&1&\frac{\sin(\omega T)}{\omega}\\0&\sin(\omega T)&0&\cos(\omega T)\end{bmatrix}X_{k} + \begin{bmatrix}T^2/2&0\\T&0\\0&T^2/2\\0&T\end{bmatrix}W_k Xk+1?=?????1000?��sin(��T)?cos(��T)��1?cos(��T)?sin(��T)?0010??��1?cos(��T)??sin(��T)��sin(��T)?cos(��T)??????Xk?+?????T2/2T00?00T2/2T??????Wk?
��
F
k
=
[
1
sin
?
(
��
T
)
��
0
?
1
?
cos
?
(
��
T
)
��
0
cos
?
(
��
T
)
0
?
sin
?
(
��
T
)
0
1
?
cos
?
(
��
T
)
��
1
sin
?
(
��
T
)
��
0
sin
?
(
��
T
)
0
cos
?
(
��
T
)
]
,
G
k
=
[
T
2
/
2
0
T
0
0
T
2
/
2
0
T
]
F_k=\begin{bmatrix}1&\frac{\sin(\omega T)}{\omega}&0&-\frac{1-\cos(\omega T)}{\omega}\\0&\cos(\omega T)&0&-\sin(\omega T)\\0&\frac{1-\cos(\omega T)}{\omega}&1&\frac{\sin(\omega T)}{\omega}\\0&\sin(\omega T)&0&\cos(\omega T)\end{bmatrix}, G_k= \begin{bmatrix}T^2/2&0\\T&0\\0&T^2/2\\0&T\end{bmatrix}
Fk?=?????1000?��sin(��T)?cos(��T)��1?cos(��T)?sin(��T)?0010??��1?cos(��T)??sin(��T)��sin(��T)?cos(��T)??????,Gk?=?????T2/2T00?00T2/2T??????
��CT ģ�Ϳ���дΪ:
X
k
+
1
=
F
k
X
k
+
G
k
W
k
X_{k+1}=F_kX_{k} +G_kW_k
Xk+1?=Fk?Xk?+Gk?Wk?
�����������������ּ��㷽ʽ
q
k
2
Ϊ
W
k
��
��
��
q_k^2ΪW_k�ķ���
qk2?ΪWk?������,��һ��:
Q
k
=
G
k
?
q
k
2
?
G
k
T
=
q
k
2
[
T
4
/
4
T
3
/
2
0
0
T
3
/
2
T
2
0
0
0
0
T
4
/
4
T
3
/
2
0
0
T
3
/
2
T
2
]
Q_k=G_k*q_k^2*G_k^T=q_k^2\begin{bmatrix}T^4/4&T^3/2&0&0 \\T^3/2&T^2&0&0 \\0&0&T^4/4&T^3/2 \\0&0& T^3/2&T^2\end{bmatrix}
Qk?=Gk??qk2??GkT?=qk2??????T4/4T3/200?T3/2T200?00T4/4T3/2?00T3/2T2??????
�ڶ��ּ��㷽ʽ,ֱ�Ӷ�����CTϵͳ��ɢ�����ֵõ�:
Q
k
=
q
k
2
[
T
3
/
3
T
2
/
2
0
0
T
2
/
2
T
0
0
0
0
T
3
/
3
T
2
/
2
0
0
T
2
/
2
T
]
Q_k=q_k^2\begin{bmatrix}T^3/3&T^2/2&0&0 \\T^2/2&T&0&0 \\0&0&T^3/3&T^2/2 \\0&0& T^2/2&T\end{bmatrix}
Qk?=qk2??????T3/3T2/200?T2/2T00?00T3/3T2/2?00T2/2T??????
���ֶ�����ʹ��,�Ҹ�ϲ����һ��
��ά�����˶�CVĿ�꺽������:
����:
clear all; close all; clc;
%% initial parameter
n=4; %dimension of the target ;
M=3; %number of rader
N=100; %the runs atime
chan=6; %channel, for the class of fiter
w_mu=[0,0]'; % mean of process noise
v_mu=[0,0]'; % mean of measurement noise
%covariance of process noise
q_x=0.1; %m/s^2
q_y=q_x;
Qk=diag([q_x^2,q_y^2]);
% state matrix
T_f=1; %sample time of fusion center
w=-pi/180*3;% ת����ٶ�
Fk= [1 sin(w*T_f)/w 0 -(1-cos(w*T_f))/w
0 cos(w*T_f) 0 -sin(w*T_f)
0 (1-cos(w*T_f))/w 1 sin(w*T_f)/w
0 sin(w*T_f) 0 cos(w*T_f) ]; %
Gk= [ T_f^2/2 0
T_f 0
0 T_f^2/2
0 T_f ]; %
% intial state
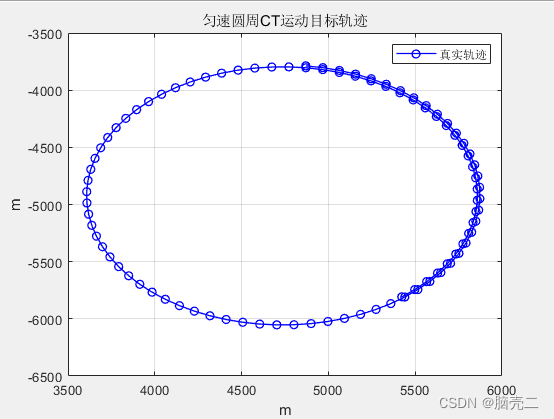
x_bar=[3500,-130,200,00]';
P_0=diag([5e6,10^4,5e6,10^4]); %initial covariance
x_bar=[-1000,50,-800,100]';
P_0=diag([1e5,1e3,1e5,1e3]); %initial covariance
x0=mvnrnd(x_bar,P_0); % ��ʼ״̬
%x0=(x+normrnd(0,0.001)')';
x=x0';
for k=1:N
%% %%%%%%% target model %%%%%%%%%%%%%%%%%%%%
%% Ŀ���˶�ѧģ��(������Ŀ�꽨ģ),�����˶�CVģ��
w=mvnrnd(w_mu',Qk)';%������������
x=Fk*x+Gk*w;
sV(:,k,1,1)=x;
end
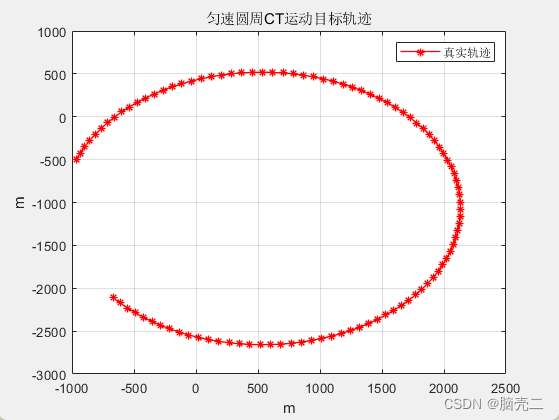
% ��ά����Բ��CT�˶�Ŀ��켣
figure
plot(sV(1,:,1,1),sV(3,:,1,1),'-*r','LineWidth',1)
grid on
xlabel('m');ylabel('m');
legend('��ʵ�켣')
title('����Բ��CT�˶�Ŀ��켣')
3.3 ����Բ���˶�CTģ��(ת����ٶ�δ֪)
ת�������
��
\omega
��δ֪ʱ,��ģ��Ϊ������ģ��,״̬Ϊ
X
=
[
x
,
x
�B
,
y
,
y
�B
,
��
(
t
)
]
T
{X}=[x, \dot{x},y, \dot{y},\Omega(t)]^T
X=[x,x�B,y,y�B?,��(t)]T
��ɢģ��Ϊ
X k + 1 = [ 1 sin ? ( �� T ) �� 0 ? 1 ? cos ? ( �� T ) �� 0 0 cos ? ( �� T ) 0 ? sin ? ( �� T ) 0 0 1 ? cos ? ( �� T ) �� 1 sin ? ( �� T ) �� 0 0 sin ? ( �� T ) 0 cos ? ( �� T ) 0 0 0 0 0 1 ] X k + [ T 2 / 2 0 0 T 0 0 0 T 2 / 2 0 0 T 0 0 0 T ] W k X_{k+1}=\begin{bmatrix}1&\frac{\sin(\omega T)}{\omega}&0&-\frac{1-\cos(\omega T)}{\omega}&0\\0&\cos(\omega T)&0&-\sin(\omega T) & 0\\0&\frac{1-\cos(\omega T)}{\omega}&1&\frac{\sin(\omega T)}{\omega}&0 \\0&\sin(\omega T)&0&\cos(\omega T) &0\\ 0&0&0&0 &1\end{bmatrix}X_{k} + \begin{bmatrix}T^2/2&0&0\\T&0&0\\0&T^2/2&0\\0&T&0\\0&0&T\end{bmatrix}W_k Xk+1?=???????10000?��sin(��T)?cos(��T)��1?cos(��T)?sin(��T)0?00100??��1?cos(��T)??sin(��T)��sin(��T)?cos(��T)0?00001????????Xk?+???????T2/2T000?00T2/2T0?0000T????????Wk?
��
F
k
=
[
1
sin
?
(
��
T
)
��
0
?
1
?
cos
?
(
��
T
)
��
0
0
cos
?
(
��
T
)
0
?
sin
?
(
��
T
)
0
0
1
?
cos
?
(
��
T
)
��
1
sin
?
(
��
T
)
��
0
0
sin
?
(
��
T
)
0
cos
?
(
��
T
)
0
0
0
0
0
1
]
,
G
k
=
[
T
2
/
2
0
0
T
0
0
0
T
2
/
2
0
0
T
0
0
0
T
]
F_k=\begin{bmatrix}1&\frac{\sin(\omega T)}{\omega}&0&-\frac{1-\cos(\omega T)}{\omega}&0\\0&\cos(\omega T)&0&-\sin(\omega T) & 0\\0&\frac{1-\cos(\omega T)}{\omega}&1&\frac{\sin(\omega T)}{\omega}&0 \\0&\sin(\omega T)&0&\cos(\omega T) &0\\ 0&0&0&0 &1\end{bmatrix}, G_k=\begin{bmatrix}T^2/2&0&0\\T&0&0\\0&T^2/2&0\\0&T&0\\0&0&T\end{bmatrix}
Fk?=???????10000?��sin(��T)?cos(��T)��1?cos(��T)?sin(��T)0?00100??��1?cos(��T)??sin(��T)��sin(��T)?cos(��T)0?00001????????,Gk?=???????T2/2T000?00T2/2T0?0000T????????
��CT ģ�Ϳ���дΪ:
X
k
+
1
=
F
k
X
k
+
G
k
W
k
X_{k+1}=F_kX_{k} +G_kW_k
Xk+1?=Fk?Xk?+Gk?Wk?
�����������������ּ��㷽ʽ
q
k
2
Ϊ
W
k
��
��
��
q_k^2ΪW_k�ķ���
qk2?ΪWk?������,��һ��:
Q
k
=
G
k
?
q
k
2
?
G
k
T
=
q
k
2
[
T
4
/
4
T
3
/
2
0
0
0
T
3
/
2
T
2
0
0
0
0
0
T
4
/
4
T
3
/
2
0
0
0
T
3
/
2
T
2
0
0
0
0
0
T
2
]
Q_k=G_k*q_k^2*G_k^T=q_k^2\begin{bmatrix}T^4/4&T^3/2&0&0 &0 \\T^3/2&T^2&0&0 &0 \\0&0&T^4/4&T^3/2 &0 \\0&0& T^3/2&T^2&0 \\0&0&0&0&T^2\end{bmatrix}
Qk?=Gk??qk2??GkT?=qk2????????T4/4T3/2000?T3/2T2000?00T4/4T3/20?00T3/2T20?0000T2????????
�ڶ��ּ��㷽ʽ,ֱ�Ӷ�����CTϵͳ��ɢ�����ֵõ�:
Q
k
=
q
k
2
[
T
3
/
3
T
2
/
2
0
0
0
T
2
/
2
T
0
0
0
0
0
T
3
/
3
T
2
/
2
0
0
0
T
2
/
2
T
0
0
0
0
0
T
]
Q_k=q_k^2\begin{bmatrix}T^3/3&T^2/2&0&0 &0 \\T^2/2&T&0&0 & 0 \\0&0&T^3/3&T^2/2 &0 \\0&0& T^2/2&T &0 \\0&0&0&0&T\end{bmatrix}
Qk?=qk2????????T3/3T2/2000?T2/2T000?00T3/3T2/20?00T2/2T0?0000T????????
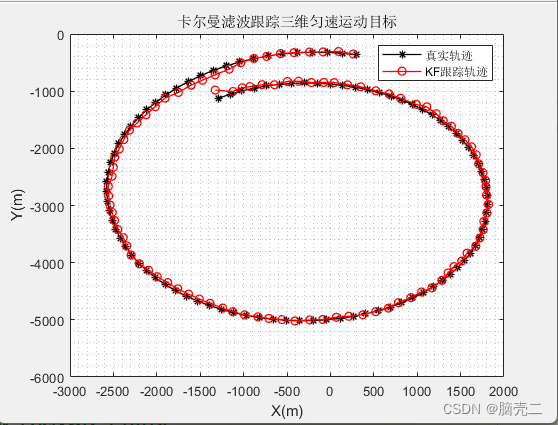
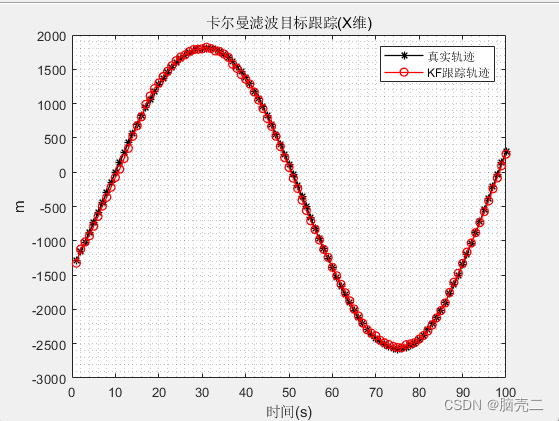
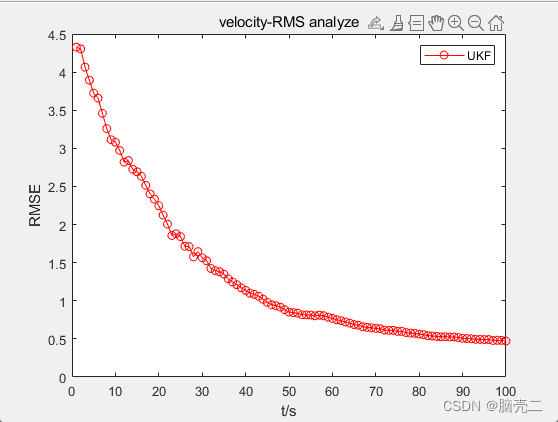
4 ����Բ���˶�CTģ��Ŀ�����
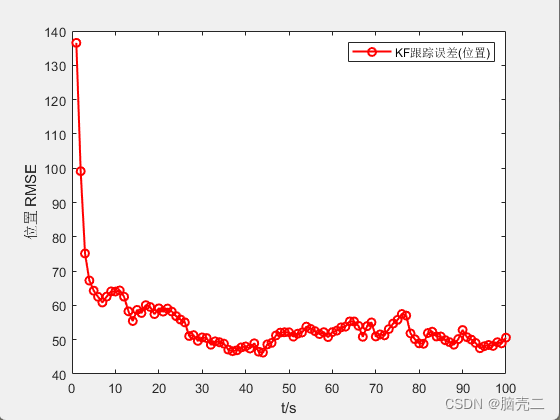
4.1 �������˲�����CTĿ��
������ϵWX: ZB823618313
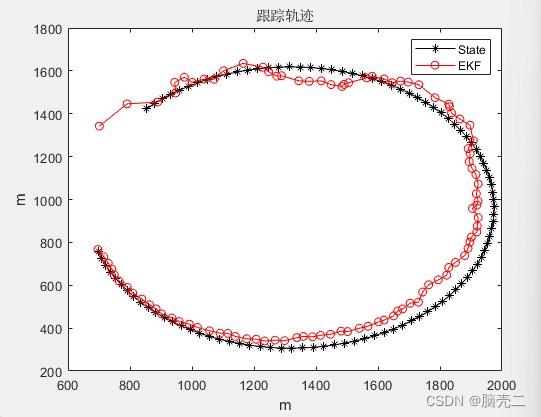
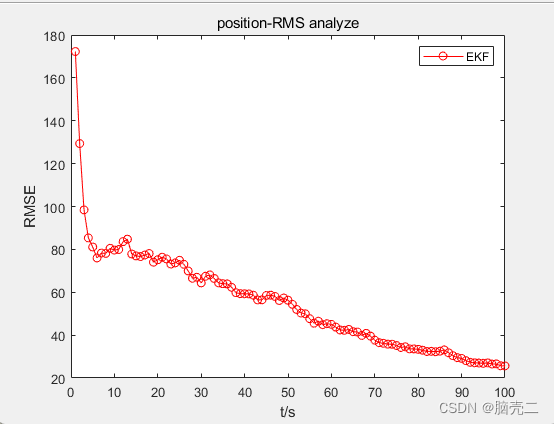
4.2 ��չ�������˲�����
������ϵWX: ZB823618313
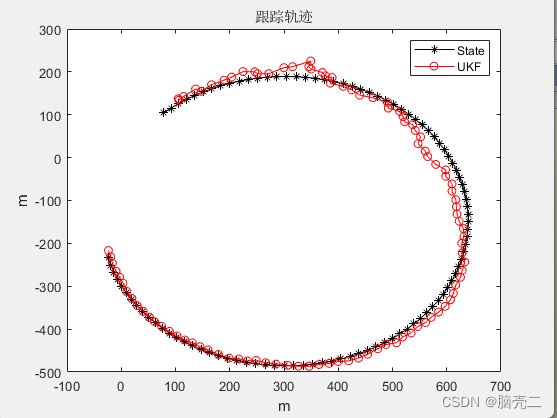
4.3 ���������˲�����
������ϵWX: ZB823618313
5 �ȼ����˶�CAģ��
�ȼ����˶�CAģ�ͼ���һ������
6 ����ת��CTģ��
����ת��CT�˶�ģ�ͼ���һ������:������ά����ά
7 Singerģ��
Singerģ�ͼ���һ������
8 ����ǰ��ͳ��ģ��
��ǰͳ��ģ�ͼ���һ������
9 Jerkͳ��ģ��
Jerkģ�ͼ���һ������
ԭ������,·���ĸ�λ����������

