�������ӵ��ƴ����е�������ƺ;ֲ����νṹ����һ���IJв�MLP���
1.ժҪ
- ���Ƶľֲ����νṹ���ܲ����ǵ��ƴ����Ĺؼ���
- �����һ�����ڴ��в��MLP���硪��PointMLP��
- ���粻���ǵ��Ƶľֲ���Ϣ,�ṹ��,�����ٶȸ���,���ܸ��á�
- ����һ��������ļ��η���ģ��(geometric affine module),Ч�����ѡ�
- �����ַ:https://github.com/ma-xu/pointMLP-pytorch
2.����
- ���Ƶ�����:�����ԡ��������ԡ�ϡ���ԡ�������
- ���Ƶ�Ӧ��:���ࡢ����ָĿ����
- ֮ǰ���ڵ��Ƶľֲ����νṹ��ȡ�Ѿ����Ĺ�����,����Ӧ�÷���ͷ�������ֲ����νṹ������û�б�Ҫ����,��������û��ʲô���Ըı��?
- ����ֻ�û��ڲв��MLP����,����ɶҲ���á�
- ����ټ���local geometric affine module,����Ӧ�ض��������б任,�Ǿ�������
- ���������PointMLP�ּ�,Ч���ֺ�,�����㿴��ͼ��

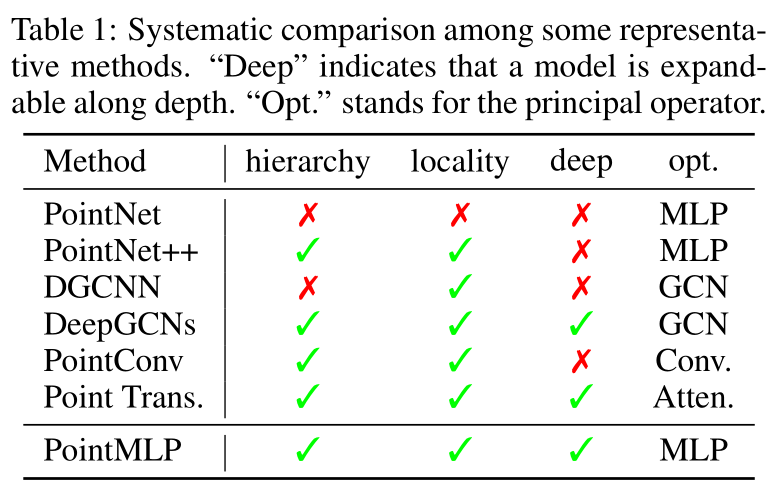
2.��ع���
���Ʒ���
- Voxels & image
- Original point cloud
�ֲ����νṹ
- convolution-based methods (PointConv/2019, PAConv/2021)
- graph-based methods (DGCNN/2019, 3D-GCN/2021)
- attention-based methods(PCT, Point Transformer)
�����ڵ��Ƶ����������
�������,���ڼ��MLP�ṹ�ĸ�Ч�Ϳ���չ��,�ܵ��˺ܶ�ع�ע,���,���Dz���äĿ���硣
3.����
feed-forward residual MLP network + geometric affine module
3.1 Revisiting point-based methods
����һ����� P = { p i �O i = 1 , ? ? , N } �� R N �� 3 \mathcal{P}=\left\{p_{i} \mid i=1, \cdots, N\right\} \in \mathbb{R}^{N \times 3} P={pi?�Oi=1,?,N}��RN��3, N N N ��ʾ���Ƶ�����, ( x , y , z ) (x, y, z) (x,y,z)��ʾ�ѿ�������ϵ�µ����ꡣ
������PointNet++
������RSCNN
������Point Transformer
3.2 PointMLP�Ŀ�ܽṹ

�����ṹ����ѧ���Ա�ʾΪ:
g i = �� pos? ( A ( �� pre? ( f i , j ) , �O j = 1 , ? ? , K ) ) g_{i}=\Phi_{\text {pos }}\left(\mathcal{A}\left(\Phi_{\text {pre }}\left(f_{i, j}\right), \mid j=1, \cdots, K\right)\right) gi?=��pos??(A(��pre??(fi,j?),�Oj=1,?,K))
���� �� pre? ( ? ) \Phi_{\text {pre }}(\cdot) ��pre??(?)�� �� pos? ( ? ) \Phi_{\text {pos }}(\cdot) ��pos??(?)��residual point MLP blocks:
- �� pre? ( ? ) \Phi_{\text {pre }}(\cdot) ��pre??(?)���ڴӾֲ�����ѧϰ����Ȩֵ
- �� pos? ( ? ) \Phi_{\text {pos }}(\cdot) ��pos??(?)������ȡ��Ⱦۺ�����
�������,�в�������������һ����MLP���(MLP ( x ) + x (x)+x (x)+x):MLP(FC)+normalization+ activation layers(�ظ�����)
A ( ? ) \mathcal{A}(\cdot) A(?) ��ʾmax-pooling
��ʽֻ��ʾһ����,�����ظ� s s s�Ρ�
PointMLP���������ŵ�:
- MLP�ṹʹ�ô�������ʱ�������в����ԡ�
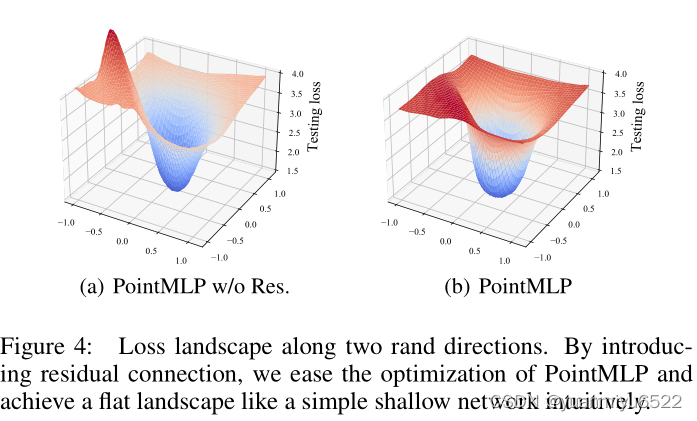
- �в���������ʹ�����繹��ĸ��
- û�и��ӵ�������ȡ��,��Ҫ�ľ���feed-forward MLP
��û����ǰ�����������, s = 4 s=4 s=4,2�� �� pre? ( ? ) \Phi_{\text {pre }}(\cdot) ��pre??(?),2�� �� pos? ( ? ) \Phi_{\text {pos }}(\cdot) ��pos??(?)��ѡ��k-nearest neighbors�㷨��ȡ�ھ�, K = 24 K=24 K=24��
3.3 Geometric Affine Module
���ڵ��Ƶľֲ�����;���ϡ��Ͳ�������,ֻʹ�ü��MLP��������ܲ����á���ͬ�ֲ�����Ķ�����νṹ������Ҫ��ͬ����ȡ�豸,�������IJ���MLP����ʵ����һ�㡣
�� { f i , j } j = 1 , ? ? , k �� \left\{f_{i, j}\right\}_{j=1, \cdots, k} \in {fi,j?}j=1,?,k?�� R k �� d \mathbb{R}^{k \times d} Rk��d��ʾ f i �� R d f_{i} \in \mathbb{R}^{d} fi?��Rd ���ھ�,�� k k k����,ÿ���ھӵ� f i , j f_{i, j} fi,j? ��һ�� d d dά���������ֲ����ڵĵ�任Ϊ:
{ f i , j } = �� �� { f i , j } ? f i �� + ? + �� , �� = 1 k �� n �� d �� i = 1 n �� j = 1 k ( f i , j ? f i ) 2 , \left\{f_{i, j}\right\}=\alpha \odot \frac{\left\{f_{i, j}\right\}-f_{i}}{\sigma+\epsilon}+\beta, \quad \sigma=\sqrt{\frac{1}{k \times n \times d} \sum_{i=1}^{n} \sum_{j=1}^{k}\left(f_{i, j}-f_{i}\right)^{2}}, {fi,j?}=������+?{fi,j?}?fi??+��,��=k��n��d1?i=1��n?j=1��k?(fi,j??fi?)2?,
���� �� �� R d \alpha \in \mathbb{R}^{d} ����Rd, �� �� R d \beta \in \mathbb{R}^{d} ����Rd�ǿ�ѧϰ�IJ���, �� \odot ����ʾ��������Ԫ�ؼ����, ? = \epsilon= ?= 1 e ? 5 1 e^{-5} 1e?5��һ��Ϊ����ֵ�ȶ��Ե����� �� \sigma �� ��ϵ��,���������оֲ���ͨ������������,��������ԭʼ�ļ���������
3.4 ���㸴�ӶȺ�Elite��
ȫ���Ӳ�����ܶ�,���Ӷ�Ҳ�ܸ�,�����bottleneck�ṹ������ѡ���м�FC���ͨ�������� r r r��,������ͨ������Ϊԭʼ����ӳ�䡣
��PointMLP-elite��, r = 4 r=4 r=4
4.ʵ��
4.1 Shape classification on ModelNet
ModelNet40:40�����,9843��ѵ��ģ��,2468������ģ�͡�
Metric:class-average accuracy (mAcc)��overall accuracy (OA)
ѵ����300��epochs
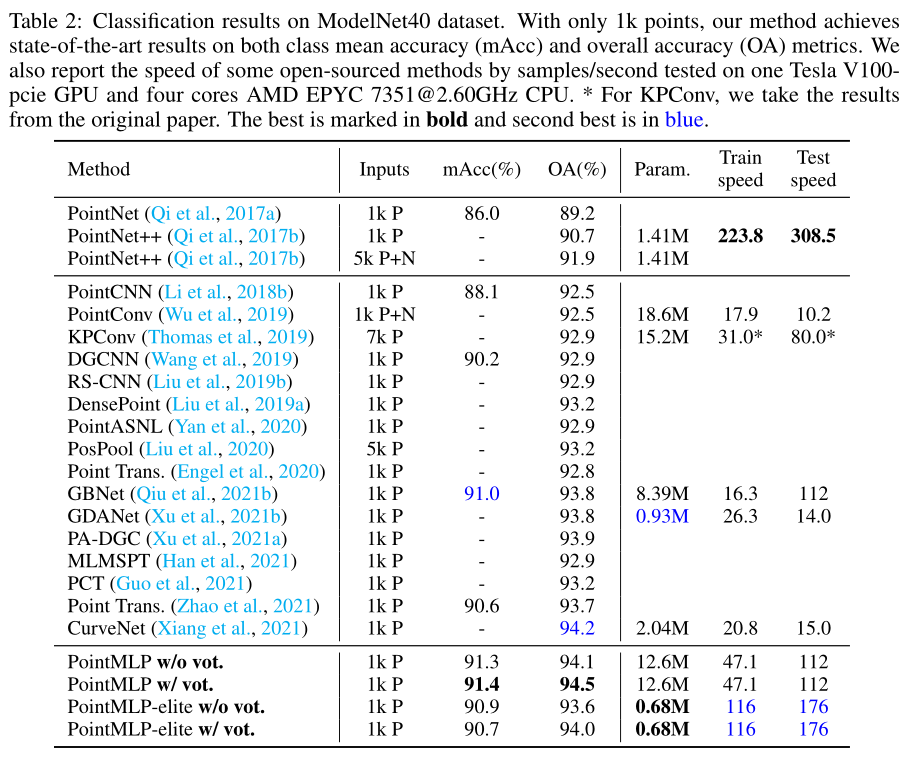
ģ�͵ĸ��ӶȲ���ֱ�ӷ�ӦЧ�ܡ�
4.2 Shape classification on ScanObjectNN
ScanObjectNN:��ʵ�����е��ؽ�ģ��,������15000������,��Щ�����Ϊ15����,����ʵ��������2902��Ψһ�Ķ���ʵ�������ݼ��д����������ڵ�,ѡ�����ѵ�PB_T50_RS��
e p o c h s = 200 , b a t c h = 32 epochs=200, batch=32 epochs=200,batch=32,ѵ�����Ĵ�,���������¼���±��С�
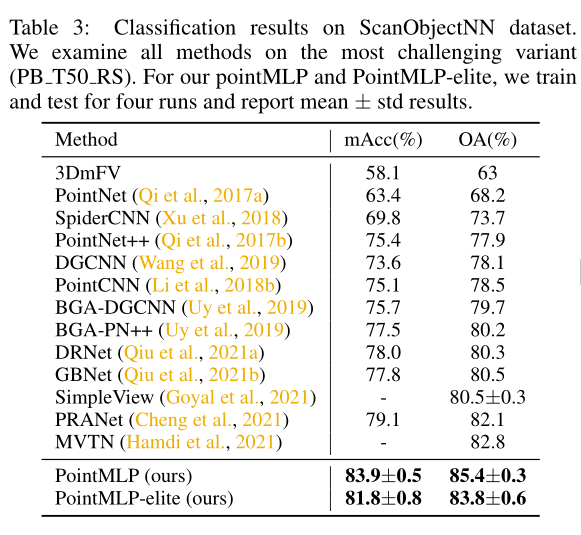
������徫�Ⱥ�ƽ�����Ⱥ����,֤��������³����
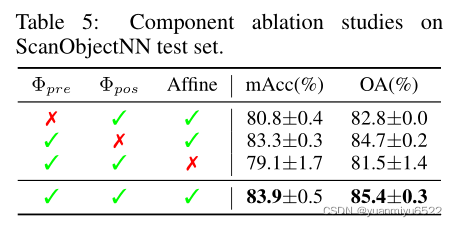
4.3 ����ʵ��
�������
- ����Խ��,Ч����һ��Խ��,���DZ�����С
- �����������,Ч�������������ŵ�Ч����
Geometric Affine Module
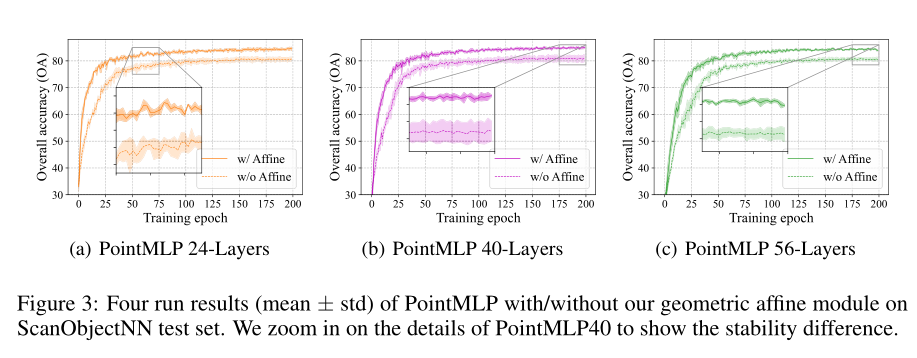
- the geometric affine module���ֲ���������ӳ��Ϊnormal�ֲ�,������ѵ��
- the geometric affine moduleͨ���ֲ����ĺͷ����ͨ������Ծֲ�������Ϣ������ʽ����,�ֲ��˼�����Ϣ�IJ��㡣
- �����³����
�ɷ�����ʵ��
Loss landscape
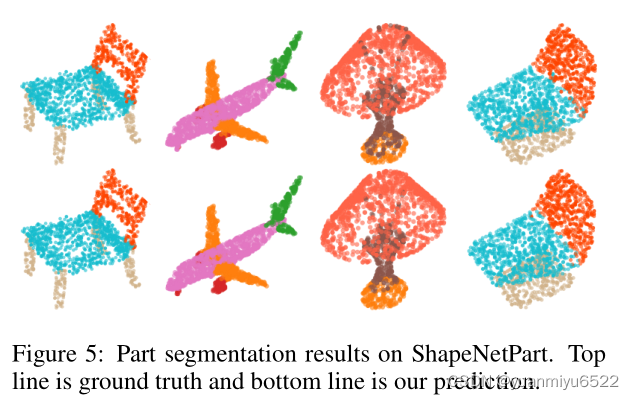
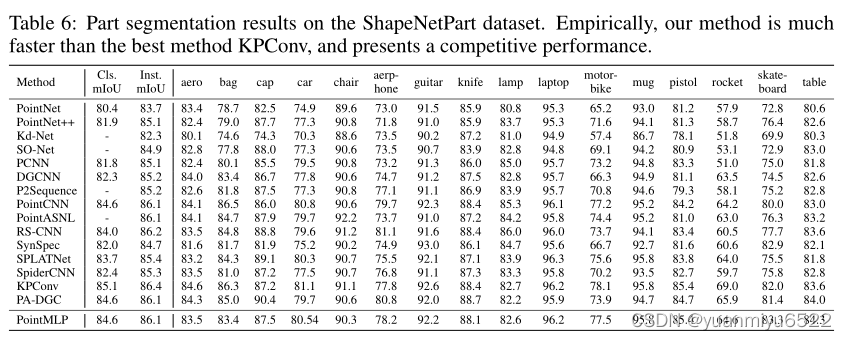
4.4 Part segmentation
ShapeNetPart:16�����,16,881����״,ÿ������IJ���Ϊ2-6����
5.����
- residual MLPs
- geometric affine module
- PointMLP-elite
6. ��¼
6.1 PointMLP detail
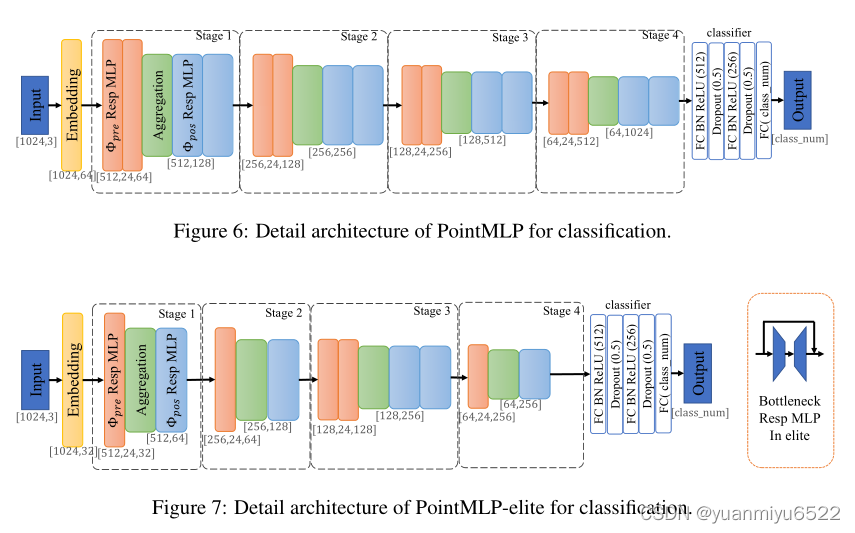
PointMLP �� PointMLP-elite�������µ�����:
- ������residual point MLP blocks������
- Embedding��ά�ȴ�64���ٵ�32
- ͨ������bottleneck�ṹ,����������4��
6.2 Experiment setting detail
ModelNet40
PyTorch + Tesla V100 GPU
epochs =300
batchsize = 32
synchronous SGD
Nesterov momentum = 0.9
weight decay = 0.0002
initial learning rate = 0.1
input point = 1024
ScanObjectNN
epochs =200
��������ͬ��
ShapeNetPart
input point = 2048
range = [0.67, 1.5]
��������ͬPointNetһ��
6.3 More detialed ablation studies
Skip connection
������PointNet++�ϼ�������skip connection,��ModelNet40�ϵķ��ྫ�ȱ�Ϊ92.7%��
Pre-MLP block vs. Pos-MLP block
ȥ��Pos-MLP block�Ļ�Ч�����ò���,����
- Pos-MLP block���Ǻ���Ҫ��
- ����Pre-MLP block������û�б�Ҫ
Geometric Affine Module Applications
��Geometric Affine Module�õ�PointNet++��,��ModelNet40�ϵķ��ྫ����ߵ���93.3%��
��Geometric Affine Module�õ�DGCNN�ϵ�Ч����������ˡ�
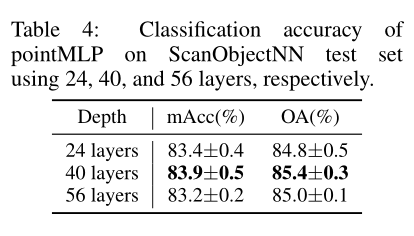
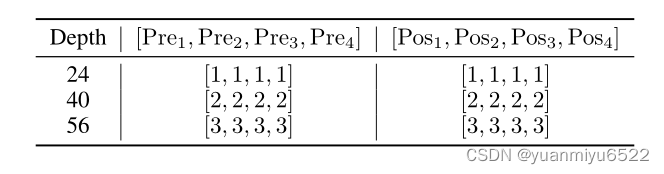
6.4 PointMLP depth
������ȼ��㹫ʽ:
L = 1 + �� i = 1 4 ( 1 + 2 �� Pre ? i + 2 �� Pos ? i ) + 3 L=1+\sum_{i=1}^{4}\left(1+2 \times \operatorname{Pre}_{i}+2 \times \operatorname{Pos}_{i}\right)+3 L=1+i=1��4?(1+2��Prei?+2��Posi?)+3
Pre ? i \operatorname{Pre}_{i} Prei?��ʾ �� pre? \Phi_{\text {pre }} ��pre??���ظ�����, Pos ? i \operatorname{Pos}_{i} Posi?��ʾ �� pos? \Phi_{\text {pos }} ��pos??���ظ�����,����Batch Normalization��activation functions,ÿ������������MLP��,���յ����������������ͼ��ʾ��
���������
- unfavorable latency ����������
- Lately ���
- endow ���衭 v.
- gratifying ��������� adj.
- saturate �ġ����յ� adj.
- eschew ���� v.
- regime ��ϵ n.
- seamlessly ���ӽ��� adv.
- flesh out ʹ������,��ʵ v.
- Unless explicitly stated
- outbeat ʤ�� v.

