����ǰ���YOLOϵ��������һЩ�Ĺؼ�������,���ڲ������ٻ���������
1.SSD(2016)
https://arxiv.org/pdf/1512.02325.pdf

?����ǰ������YOLOϵ��,�ȷ��Ͻṹ��ͼ,�п�ͼ�ͺ�����������

?��Ҫ������:
(1)����������VGG16����,��VGG16��FC6��FC7��ת��Ϊ������,��ͼ1�ϵ�Conv6��Conv7,ȥ�����е�Dropout���FC8��;������Atrous�㷨(hole�㷨),��Pool5��2x2-S2�任��3x3-S1��������ʾ��ͼ����:

(2)��ȡConv4_3��Conv7��Conv8_2��Conv9_2��Conv10_2��Conv11_2���feature map,Ȼ��ֱ�����Щfeature map�������ÿһ���㹹�첻ͬ�߶ȴ�С��BB,Ȼ��ֱ���м��ͷ���,���ɶ��BB
(3)����ͬfeature map��õ�BB�������,����NMS(�Ǽ���ֵ����)���������Ƶ�һ�����ص����߲���ȷ��BB,�������յ�BB����(�������)
SSD�㷨��ʹ�õ���conv4_3,conv_7,conv8_2,conv7_2,conv8_2,conv9_2,conv10_2,conv11_2��Щ��С��ͬ��feature maps,��Ŀ����Ϊ���ܹ�ȷ�ļ���ͬ�߶ȵ�����,��Ϊ�ڵͲ��feature map,����Ұ�Ƚ�С,�߲�ĸ���Ұ�Ƚϴ�,�ڲ�ͬ��feature map���о���,���Դﵽ��߶ȵ�Ŀ�ġ�
����ͼ��ÿ��λ��Ԥ��K��BB,����ÿһ��BB,Ԥ��C�����÷�,�Լ������Default box��4��ƫ����ֵ,�����ܹ���Ҫ(C+4)* K��Ԥ����,����m*n������ͼ���潫�����(C+4)* K * m * n��Ԥ��ֵ��
2.DSSD(2017)
https://arxiv.org/pdf/1701.06659v1.pdf

��ģ����ԭ SSD �Ļ����ϸ����˻�������,��������Ԥ��ģ��ͷ�����ģ������������ͼ�ķֱ���,�Ӷ����ƶ�ͼ���н�СĿ��ļ��Ч����SSD ��СĿ��ļ��Ч������,��Ҫԭ���������Ԥ��СĿ����������dz��������Ϣ,ȱ�������������Ƚ�ǿ��������Ϣ,���������ѧϰ����СĿ������������Ϣ���� DSSD �ĺ������⡣
�ṹ��ͼ


?���Կ���������Ҫ�Ľ���2��,�������top down������ṹ,���ӷ�������(������ģ��DM)ʵ�����������dz���������ں�,��Ԥ������ӻ��ڲв�鹹����Ԥ��ģ��(PM),�Ż����� ����+�߽�����������ͼ��
DSSD ѡ��ʹ�� Eltw Product ��dz�����������ͼ�ڶ�Ӧ��ͨ�������˷�����,ʵ���˸߲������͵Ͳ��������ں�,����˼�뼴 Top Down�ں����ṹ����:

?��ÿ�����������һ�� BN ��,����ķ�������ָ���Խ���ѧϰ�ľ����������,����˫�����ϲ�����
3.FSSD(2018)
https://arxiv.org/pdf/1712.00960v3.pdf

?�ص��ǸĽ��������ں��㷨,�������

?����ͬ������ͼ�ϲ���һ����Ҫ�����ַ������������Ͱ�Ԫ����͡���Ԫ�ؽ������Ҫ������ӳ��Ӧ�þ�����ͬ�Ĵ�С,����ζ������ӳ���ת������ͬ��ͨ��,���������ں�����ӳ��������,����ʹ�ô���,����ʵ����������Ľ��Ҫ�Ȱ�Ԫ����͵Ľ�����á�����βʱ��,�������ᵽ��չ������Ҳ��һ���ȽϺõ�˼·��

4.FPN(2017)
https://arxiv.org/pdf/1612.03144.pdf
�����еĽ�ͼ



?������һ���������:

5.RetinaNet(2018)
https://arxiv.org/pdf/1708.02002.pdf

backbone���ֺ�FPN��������,FPN��ʹ��C2,RetinaNetû��,C2���ɵ�P2��ռ�ø���ļ�����Դ��

Ԥ�ⲿ�ֵĽṹ����ͼ:

?���� RetinaNet ��һ�� one-stage ������,���Բ��� ROI pooling,ֱ��ʹ������ͼ��ʾ��Ȩ�ع����Ļ��ھ���������Ԥ������Ԥ������Ϊ������֧,�ֱ�Ԥ��ÿ�� anchor ���������,�Լ�Ŀ��߽��ع���������� kA �� k �Ǽ��Ŀ���������,ע������� k �������������,���� PASCAL VOC ���ݼ��Ļ����� 20������� A ��Ԥ����������ÿһ��λ�����ɵ� anchor �ĸ���,��������� 9��(���ڻ����������������֪ anchor �ع����Ԥ��,Ҳ��������Ϊÿһ�����ͬһ�� anchor �ع����Ԥ����)
����һ�����ĵĹ������ focal loss������ʧ��Ȼ��Ϊ������,һ�����Ƿ�����ʧ,һ�����ǻع���ʧ��Focal loss �Ƚ϶��ص�һ������������������������������ʧ,Ȼ��������������лع���ʧ�ļ��㡣
Ϊ��ʵ�����������ı�������,����������ѵ�����̱�����������û��,һ���ȡ�����ķ���,��������������������1:3,�Ӷ������������䱣�ֺ����ı�������Ϊ one-stage ֻ��һ����,�����ĺ�ѡ����� two-stage Ҫ��̫�ࡣͨ����Ҫ��Լ100K��λ��(���� SSD �� 8700+ ��λ��),������������������ʮ����,��֮���١���ʹ�������,�����ѵ��������,���ǻᾪ��ķ���,�������̻��DZ������������ֵĸ�����,Ҳ���DZ�����������Focal loss ����һ����̬���ŵĽ�������ʧ,һ���Ա�֮,ͨ��һ����̬��������,���Զ�̬����ѵ��������������������Ȩ��,�Ӷ��� loss �����Ŀ��پ۽�����Щ�����ֵ�������
6.Efficientdet D0~D7(2020)
https://arxiv.org/pdf/1911.09070.pdf

Google Brain�Ŷӵ�����,������֪,��������ٶȺ;���֮�����Ȩ��,��Efficientdet��һ���ܳ�,���Է�Ϊ EfficientDet D0~ EfficientDet D7,�ٶ�����,���Ǿ���Ҳ����ߡ�����ͼ�п��Կ���,EfficientDet-D7 �����ܷdz��ľ���:�� 326B FLOPS,������ 52 M������,COCO 2017 validation ���ݼ���ȡ���� 51.0 �� mAP,state-of-the-art �Ľ������ AmoebaNet + NAS-FPN ���,FLOPS ��Ϊ��ʮ��֮һ�������ȡ���˸��õĽ����

?��ƪ���µ���Ҫ������ BiFPN,Compound Scaling �����֡�
��������ͬ level �����������ڵ�֮������һ����,���������ںϸ�������,�е� skip-connection ����ζ��BiFPN ����,����PANet�Ļ�����,����һЩ���۵ļ���,��������ԵĻ���,�õ��˲���������,Ч�����õ����ӷ�ʽ��

?���Կ���,�����ǻ�Ķ���,������˼����,��Ծʽ���ں���dz����������ͼ

?Cross-Scale Connections
����,�������,֮ǰ��FPN��ʼ�ձ���õ�,һ�������� Resize ,�ٺ���һ���������ӵķ�ʽ����������Ϊ�������������������������ͬ��Ȩ�ء��Ӹ����ӵĽ�ģ�Ƕȳ���,Ӧ��ÿһ�� feature ����ӵ�ʱ��Ҫ��һ���Լ���Ȩ�ء�
����Compound Scaling ����,Model Scaling ָ�������Ǿ���������Դ������,��ģ�ͽ��е���������˵Ϊ�˰� backbone ���� scale up,�õ������ģ��,�ͻῼ�ǰѲ�������, Res50 -> Res101����,����˵���������ͼ�ķֱ�������EfficientNet�� Model Scaling ��ʱ����������� width, depth, and resolution ��Ҫ�ء���EfficientDet��һ����չ,�� EfficientNet������ backbone,������ EfficientNet B0 ~ B6,�Ϳ��Կ��� Backbone �Ĺ�ģ;neck ����,BiFPN �� channel �������ظ��� layer ����Ҳ���Կ���;����� head ���ֵIJ���,�Լ� ����ͼƬ�ķֱ���,��Щ�����EfficientDet�� scaling config ��


7.CornerNet(2018)
�����Ҫ֪����Anchor-Based��Anchor free����,ǰ�沩��������yolo v1��Anchor free��,�����������ǻ���Anchor��,�Լ���ƪ����ǰ����ܵķ���Ҳ��Anchor-Based���������ܽ�Ϊ:����������ֶ����,ѵ����Ԥ����̵�Ч,���������������⡣�������:

��������- Hourglass Network
hourglass �ṹ:?

Hourglass���ɾ����ͳػ���feature maps�²�����һ����С�ij߶�,֮������nearest neighbor upsampling�ķ��������ϲ���,��feature maps��ԭ���ʼ�ij߶ȡ����ѿ���,�²������ϲ����ǶԳƵ�,������ÿ��upsampling�㶼��һ��skip connection,skip connection����һ��residual modules��ʹ������ɳ©�ṹ��Ŀ����Ϊ�˷�����ȡ��ͬ�߶���ͼƬ����������Ϣ������һЩ�ֲ���Ϣ,�����������ֲ���Ϣ��
CornerNet ��������ͨ���������hourglass module��ɡ�

?��hourglass module������ͨ��һϵ�еĽ�����������С����Ĵ�С,Ȼ��ͨ���ϲ����ָ�������ͼ���С,��˸ò��ֵ��������ͼ��С����128��128,����hourglass network�������104�㡣hourglass module��������������֧ģ��,�ֱ��ʾ���Ͻǵ�Ԥ���֧�����½ǵ�Ԥ���֧,ÿ����֧ģ�����һ��corner pooling���3�����:heatmaps��embeddings��offsets��heatmaps�����Ԥ��ǵ���Ϣ,������ά��ΪCHW������ͼ��ʾ,����C��ʾĿ������HeatmapsԤ����Щ�����п�����Corners��,Embeddings���ڱ���������ͬ�����corner�����ƶȡ����ǵ�ͨ������ΪC,C��object������� (������background) ������Offsets���ڶ�corner��λ�ý���������
������߾���heatmaps�е���������ָ�����,ֻ������Ķ��������Ͻǵ�����½ǵ㡣
����Ԥ�ⲿ�ֽṹ����:

��������֧·����33�ľ�����,����corner pooling,��ӻ㼯��1·,����ٽ���3x3�ľ�����batch normalization;�������֧·����11�ľ�����batch normalization ��,����·��Ӻ����뵽Relu�����С����,�ٶ�feature maps����33�ľ���,���ŷ���·33�ľ���+Relu�������Heatmaps, Embeddings, Offsets����feature maps��
Corner-poolling�ṹ����:
���߲�����һ�ָ�Ч�ķ���,���ֱ�������������ϴ�������,�����ŵ�ǰ�������������������ֵ��Ϊ�滻ֵ���ɿ���ʵ��corner pooling������ÿ�л���ÿ��ֻ��Ҫ�����������жϼ���,����Ҫÿ���㶼Ҫ�ж����ط����ϵ������С��е����ֵ,�����˴���Ч�ʡ�
8.CenterNet(2019)
https://arxiv.org/pdf/1904.08189.pdf

ģ�ͽṹ����:

������Ҫ����2DĿ������һ��,������ṹ���ǻ����������Ԥ��ͷ(���ĵ�,ƫ�úͳߴ�),�����������ResNet,DLA,Hourglass����ѡ��
P�������ĵ���ԭͼ��λ��,R��������²�����,Ҳ�������������ͼ��С�ı��ʡ�Ԥ����:��ԭͼͨ������任���512x512,����255,����ֵ,�����C: ���ĸ�����keypoint:������ͼ����ʽ����,Ԥ��Ŀ�������ĵ�,������λ����Ŀ�����ĵ�����Ŷȡ�
ȱ��:ͬһ������������������ĵ���ͬ,ģ��ֻ�ܸ���һ���������,ԭ������Ϊ�������ͼͬһ��λ��ֻ����һ������,����������fpn�Ľṹ�����������⡣
����Ŀ���(����)

1.heatmap�ķ�ֵ��λ�þ���Ŀ������ĵ㡣��ģ��heatmap���������ͨ��3x3�ľ����˽������ػ�����,�����ֲ����ֵ,Ȼ��ѡ��ÿ������topk(100)�����ص�,Ȼ��ͨ��ÿ�����topk��(topk x C)ѡ���������topk��
2.ͨ��topk�����ص��λ���ҵ��õ��ӦĿ���wh��offset,��������Ŀ���
3.���ڽ���������Ŀ����������topk��,��Ҫͨ����ֵ(0.3)���˵�һ�������ŶȲ��ߵ�Ԥ������?
9.TTFNet(2019)
https://arxiv.org/pdf/1909.00700.pdf

���Ȼع�һ��CenterNet�������,����Ŀ������Ϊ������:���Ķ�λ�ͳߴ�ع顣���ڶ�λ����,�����ú�CornerNetһ���ĸ�˹������������ͼ,���ַ�ʽ���Ա�֤������Ŀ������ĸ���������ǿ���ļ���ֵ�����ڻع�����,�����崦��Ŀ�����ĵ�������Ϊѵ����������ֱ��Ԥ��Ŀ��Ŀ���,ͬʱҲԤ��һ��ƫ��(offset)���ָ������²�����ɵ���ɢ����������������ʱ������Ŀ�����ĵ㸽��������ǿ�ļ���ֵ,���NMS���DZ����,��������ļ��㿪�����Ժ��Բ��ơ�
Ϊ������NMS������,���TTFNet��ƪ���µ����Ķ�λ��CenterNet�����Ƶ�,ֻ������һ�������˸�˹���б߿�Ŀ��߱�,����CenterNetû�п��ǵ�,���CenterNet�IJ����Ǵ��ŵġ�
�����ڳߴ�ع�,�����ķ����Ǽ��Ǹ�������ע���ڵ����ص���߱�ע�����ӿ������ڵ����ص���Ϊѵ����������������Ϊ,Ӧ����������˹�����ڵ��������ص���Ϊѵ������������,����Ŀ��ߴ��˹���ʼ����Ȩ�ر�Ӧ�õ���Щ�������Ա��ڸ��õ�������ȡ,�����������ͼ��ʾ,������Ҫ������Ԥ���֧����������,����Ǽ�����Ч�ļ���ܡ�
�ṹ����:

10. RCNN(2014��)

? ��ʵҲ����һ��������˼ά�����Ͽ��dz������㷨,�����������п�,�����С�RCNN˵���˷���3����,��һ������ͨ��Selective Search������������ѡ����,�ڶ����Ƕ�ÿ����ѡ������ȡ�̶����ȵ���������,��������ʹ��SVM���������з��ࡣ������Կ����Աȴ�ͳ�㷨,�����кܴ�ͳ�㷨����Ӱ,��ͳ�Ŵ���뷢һ����DZ���ͼ��,������������,����ȡ�������������������������뵽SVM���з���,Ȼ������������ȥ�����ĸ�λ��������ҵ�Ŀ����Ϊ�ӽ���ֻ��������������ȡ���õ�CNN��������ͼ�����㷨��֪ʶ����,������Щ�����ѡ�����ص�˵���ٲ�������:R-CNN ���� AlexNet,���� Selective Search �������� Region Proposal,�� ImageNet ���Ƚ���Ԥѵ��,Ȼ�����ó����Ȩ�ز����� PASCAL VOC ���ݼ��Ͻ��� fine-tune,�� CNN ��ȡ����,Ȼ����һϵ�еĵ� SVM �����Ԥ��,R-CNN �� bbox λ�ûع���� DPM �����,�Լ�ѵ����һ�����Իع�ģ�͡���ILSVRC 2012��2013���ֽ������,CNN�ڼ�����Ӿ���������ʾ����ҪԶ���ڴ�ͳ��HOG��SIFT������,�������ֲ�εġ���Ρ���ϸ�����������㷽ʽҲ���ӷ����������֪ϰ�ߡ�Ŀ����������Ŀ��ʶ�����Ҫ��һ��������ҪĿ��ľ���λ��,Ҳ����BoundingBox��������BoundingBox��ķ������ǻ���,�����ھ��������ϻ�����
�㷨ȱ��:ʱ�����̫����,����ѵ���Ƿֽε�,̫�鷳��
��������AlexNet
11.SPPNet(2015)
https://arxiv.org/pdf/1406.4729.pdf

?��Ҫ�������һ������ṹ,�ܹ������̶���С�ı�ʾ(fixed-length representation),������������ͼ��ijߴ�����,SPP-net���ձ�Ľ����ֻ���CNN��ͼ����������ImageNet-2012���ݼ���,SPP-net�ɽ����ֲ�ͬ��Ƶ�CNN�ܹ��ľ��ȶ������������Ҳ������Ϊһ����ϵĴ��µ�,һЩ����ṹ�л�û���ô�˼��Ķ�����ȥ�Ľ�(֮ǰ���е�CNNs����Ҫ�����ͼ��ߴ��ǹ̶���(����224��224),������������ͼ��ij����Ⱥ����ų߶ȡ�����������ߴ��ͼ��ʱ,�����Ƚ�ͼ����Ӧ�ɹ̶��ߴ�,���������ü�(crop)�ͱ���(wrap))������RCNN, SPPNet�����Ŵ�����ͼƬ,����CNN��,����һ����������ȡ,�õ�����ͼ,Ȼ��������ͼ���ҵ�������ѡ�������,�ٶԸ�����ѡ����ÿռ�������ػ�,��ȡ���̶����ȵ�������������R-CNN�������ÿ����ѡ��,Ȼ���ڽ���ʹ�ö�ߴ�ѵ��,Ϊ����ѵ��ʱ�����ͬͼ��ߴ������,����һЩԤ��õijߴ硣���ڿ����������ߴ�:180��180,224��224��������ѡ����ZF-5��Convnet-5��Overfeat-5/7��Ϊ����ģ��
���Ͼ���Ķ�߶���������ͼ:

�����ľ������ȫ���Ӳ�֮�����SPP�㡣����������,��conv��õ�������ͼ��256��,ÿ�㶼��һ��spatial pyramid pooling���Ȱ�ÿ������ͼ�ָ�ɶ����ͬ�ߴ������,��������ֱ�Ϊ44��22��11,Ȼ��ÿ��������max pooling,����256������ͼ���γ���16256,4256,1256ά����,�������������γ���һ���̶����ȵ���������,������������뵽�����ȫ���Ӳ㡣
?
����,��ס����������ͼ��ʹ���˲�ͬ�߶ȵ�,��������ͼ����ҲӦ���˶�߶�
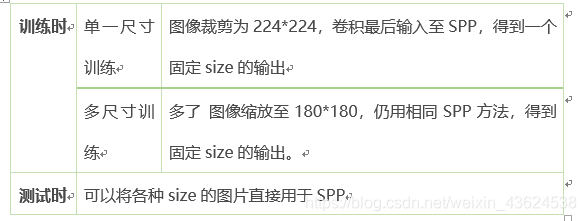
���ߴ���ߴ緽��ֻ����ѵ���Ρ��ڲ��Խ�,��ֱ�ӶԸ��ֳߴ��ͼ��Ӧ��SPP-net�ġ�
12.Fast RCNN(2015)

?�ۺ���RCNN��SPPNet, ���ڴ˻����������Ż�,���˴��¹�����
������ȡ����������ͼ��ʹ��selective searchȥ�ҵ���ѡ����,����SPPNet, �������ROI Pooling��,���ͼƬ��selective seachѡ���ĺ�ѡ��ӳ�䵽����ͼ�϶�Ӧ��λ��,���ӳ���Ǹ�������ͼƬ��С�ijߴ����ġ���ӳ�䵽feature map�����roi region�����ͳһ��С������,��Ϊ��Щ������������С��һ�����ò����N*5�ľ���,N��ʾROI����Ŀ,5�еĵ�һ�б�ʾ�ڼ���ROI,�����ĸ�����(x,y,w,h)��������,����ʹ��SVM������,������ͻع����һ��������ѵ���������һ���������SSP Layer��ΪRoI Pooling Layer;��������˶�������ʧ����(Multi-task Loss),���߿�ع�ֱ�Ӽ��뵽CNN������ѵ��,ͬʱ�����˺�ѡ���������ʧ��λ�ûع���ʧ������ȡ������������ȫ���Ӳ�,Ȼ����Softmax���з���,�Ժ�ѡ�����λ�ý��лع顣
RoI Pooling Layer:ʵ������SPP Layer�ļ�,SPP Layer��ÿ����ѡ����ʹ���˲�ͬ��С�Ľ�����ӳ��,��SPP Layer���ö���߶ȵijػ�����гػ�����;��RoI Pooling Layerֻ�轫��ͬ�߶ȵ�����ͼ�²�����һ���̶��ij߶�(����7*7)���������VGG16����conv5_3��512������ͼ,��Ȼ����ͼ��ijߴ��������,����ͨ��RoI Pooling Layer��,�������һ��7*7*512ά�ȵ�����������Ϊȫ���Ӳ������,��RoI Pooling Layerֻ���õ�һ�߶Ƚ��гػ������߶Ա�����ͼ��ʾ:
����������vgg16
13.Faster RCNN(2016)
https://arxiv.org/pdf/1506.01497.pdf

�����Fast RCNN, ��ʹ����Region Proposal Networks(RPN����)����region proposals, ͬʱ�������鴰�ڵ�CNN��Ŀ�����CNN����,�����ĺ�Fast RCNN��ࡣ�ص���RPN��
��Ҫ������:�����������̶���СMxN,Ȼ��MxNͼ����������;��Conv layers�а�����13��conv��+13��relu��+4��pooling��;RPN�������Ⱦ���3x3����,�ٷֱ�����positive anchors�Ͷ�Ӧbounding box regressionƫ����,Ȼ������proposals;��Roi Pooling��������proposals��feature maps����ȡproposal feature�������ȫ���Ӻ�softmax������classification(������proposal������ʲôobject)��

����1:��Faster RCNN Conv layers�ж����еľ������������ߴ���( pad=1,�����һȦ0),����ԭͼ��Ϊ (M+2)x(N+2)��С,����3x3���������MxN ��������������,����Conv layers�е�conv�㲻�ı��������������С
��ʵRPN���վ�����ԭͼ�߶���,ÿ�����ض����ö����ѡAnchor��Ȼ����cnnȥ�ж���ЩAnchor��������Ŀ���positive anchor,��Щ��ûĿ���negative anchor������,�����Ǹ����������!
��ôAnchorһ���ж��ٸ�?ԭͼ800x600,VGG�²���16��,feature mapÿ��������9��Anchor,����:
ceil(800/16) * ceil(600/16) *9 = 50*38*9=17100
����ceil()��ʾ����ȡ��,����ΪVGG�����feature map size= 50*38����9��anchors��ز������Կ�����ͼ:

��ԭ����ʹ�õ���ZF model��,��Conv Layers������conv5��num_output=256,��Ӧ����256������ͼ,�����൱��feature mapÿ���㶼��256-dimensions
��conv5֮��,����rpn_conv/3x3������num_output=256,�൱��ÿ�������ں�����Χ3x3�Ŀռ���Ϣ(�²�������Ҳ����³��?������û����),ͬʱ256-d����(��ͼ4��ͼ7�еĺ��)
������conv5 feature map��ÿ��������k��anchor(Ĭ��k=9),��ÿ��anhcorҪ��positive��negative,����ÿ������256d featureת��Ϊcls=2k scores;��ÿ��anchor����(x, y, w, h)��Ӧ4��ƫ����,����reg=4k coordinates
����һ��,ȫ��anchors��ȥѵ��̫����,ѵ��������ں��ʵ�anchors�����ѡȡ128��postive anchors+128��negative anchors����ѵ��(ʲô�Ǻ��ʵ�anchors����5.1�н���)
ͬʱ��֤2k������,���Բμ���Ӧ��caffe prototx
layer {
name: "rpn_cls_score"
type: "Convolution"
bottom: "rpn/output"
top: "rpn_cls_score"
convolution_param {
num_output: 18 # 2(positive/negative) * 9(anchors)
kernel_size: 1 pad: 0 stride: 1
}
}���Կ�����num_output=18,Ҳ���Ǿ����þ��������ͼ��ΪWxHx18��С(ע��ڶ��¿�ͷ�ᵽ�ľ������㷽ʽ)����Ҳ�պö�Ӧ��feature mapsÿһ���㶼��9��anchors,ͬʱÿ��anchors���п�����positive��negative,������Щ��Ϣ������WxHx(9*2)��С�ľ���Ϊ��������?�����softmax������positive anchors,Ҳ���൱�ڳ�����ȡ�˼��Ŀ���ѡ����box(һ����ΪĿ����positive anchors��)��
����VGG��ѡ�õ�����ͼΪ50*38*512,���Ӧ���õ�anchors������Ϊ50*38*k, ��RPN���50*38*2k�ķ������������50*38*4k������ع���������
��߶���������,������Կ���������:
ͼ�������:ͨ����ͼ���������ͬ�ijߴ�,Ȼ����ȡ����ȥ�����е�������RCNN�е�ʵ�ַ�ʽ,��Ȼ������ҪΪÿһ���ߴ��ظ���ȡ��������,�ɱ��ܸߡ�
��������������:�ȶ���ͼ����ȡ��������,Ȼ����������������ͬ�ijߴ硣������SPP��ʵ�ַ�ʽ����SPP������Ҳ����,�������ͼ��Ҳ��Ҫ���������ֳߴ�,������߶Ƚ����
anchor������:ͨ����ͬ�߶ȵ�anchor�ھ��������ϻ����൱����anchor������,����Ҫͼ���ж���ߴ�,����Ҫ�ж���ߴ��anchor�ͺ��ˡ�����ʹ����3�ֳ߶��Լ�3�ֱ�����
14.OverFeat
�����������ָ�������
?һ.������³��õļ��ɺõ�ģ��
�о���keras��tensorflow hub��pytorch�Դ���ģ��,��Щģ�Ͷ�Ӧ������֪ʶ��Ҫ�ص��˽��¡�
1.keras


������keras�Դ���Ԥѵ������ģ��,��Ҫ������ο�kerasѵ��Ԥ��,�����ڹ�������ĵ�
�����кܶ����ӿ���ȥ�ο�,��Ҳ�й���3D Pointsѵ��Ԥ�������
?2.tensorflow hub
�������ͼ����ࡢĿ���⡢����ָ�Ķ���
3.Pytorch
Models and pre-trained weights �� Torchvision 0.12 documentation
�������ͼ����ࡢĿ���⡢����ָ��Ҳ����
��.��������
1. MobileNetV1~V3���Բο����沩��
Mobile Net ϵ�С�V1��V3��_����ǧ��IJ���-CSDN����
2. DenseNet���Բο����沩��
3.Efficient���Բο����沩��
�����İ��о���EfficientNet��EfficientDet - ֪��4
4. GooleNet
��Ƚ����˼������GoogLeNet����Inceptionģ�� - ֪��
���ѧϰ:��ϸ˵��GoogleNet����ṹ - ���¾�
��.����ָ�
Mask-RCNN �㷨����ʵ�����_remanented�IJ���-CSDN����_maskrcnn
�����ο�����֮ǰ�IJ���:
���ѧϰ֮��⡢���༰�ָ�(һ)_��Ҷ��lvye�IJ���-CSDN����_�����ָ�
���ѧϰ֮��⡢���༰�ָ�(��)_��Ҷ��lvye�IJ���-CSDN����
Ŀ����ࡢ����ָĿ�����е����ѧϰ�㷨�����ܽ�_��Ҷ��lvye�IJ���-CSDN����_vgg����ָ�
���������:
SSD���_�����ھ��ߵIJ���-CSDN����_ssd���
Ŀ����(��):SSD_Ȯڣ��ϣ�IJ���-CSDN����_ssd300��ssd512
Ŀ����(��):DSSD_Ȯڣ��ϣ�IJ���-CSDN����_dssdĿ����
��Ŀ���⡿FSSD��������_���Ͻ���������IJ���-CSDN����_fssdģ�����ѧϰ֮Ŀ����(��)-- RetinaNet����ṹ���_ľî_THU�IJ���-CSDN����_retinanet��Ŀ���⡿FSSD��������_���Ͻ���������IJ���-CSDN����_fssdģ��
���ѧϰ֮Ŀ����(��)-- FPN�ṹ���_ľî_THU�IJ���-CSDN����_fpn ���ѧϰ
һ��Ŀ������-RetinaNet�������� - ֪��
AnchorFreeϵ���㷨���_ݥݥ�IJ���-CSDN����_anchor free
CornerNet���_maxruan�IJ���-CSDN����_cornernet
CornerNet �㷨�ʼ�_AI֮·�IJ���-CSDN����_cornernet
[Ŀ����]CenterNet_superjfhc�IJ���-CSDN����_centernetCenterNet�㷨�ʼ�_AI֮·�IJ���-CSDN����_centernet

