环境:MATLAB 2021b
可以直接查看MATLAB帮助文档?Stereo?Camera Calibrator 的内容
1、图像获取
手持棋盘格录制一段视频,要在摄像机视野内到处晃一晃,倾斜棋盘格检测不同的角度,
like this:
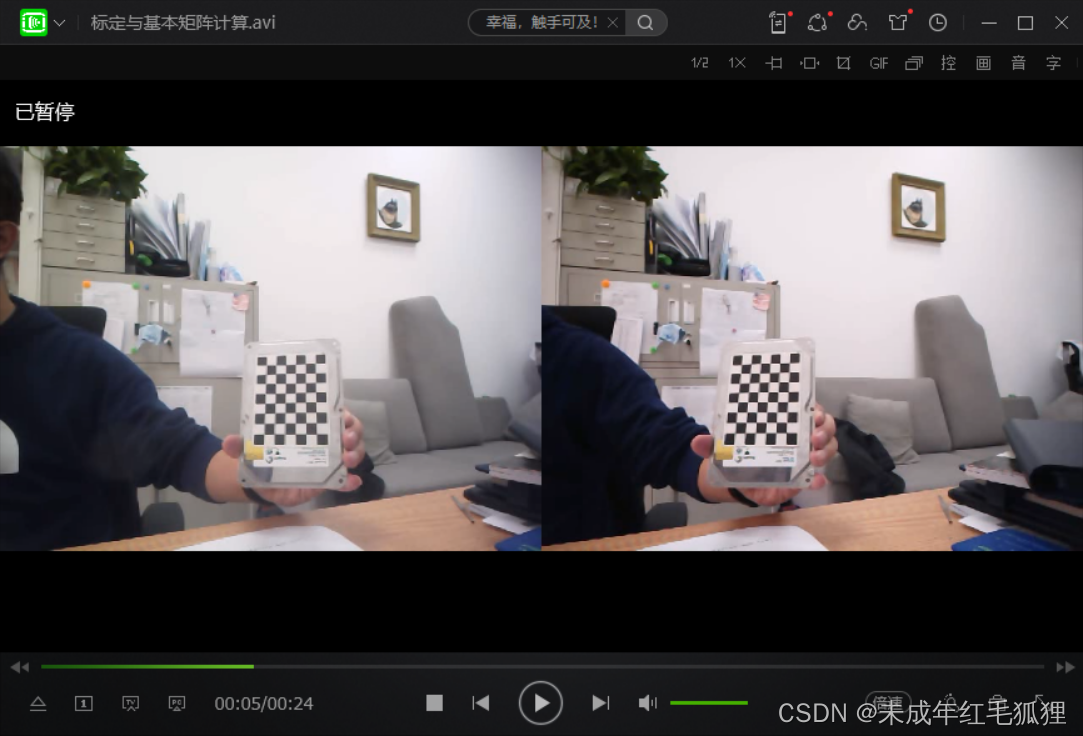
然后从这个视频中选取几帧图像,分割成左右两部分,分别存入两个文件夹中备用。
2、双目相机标定
单目相机使用这个 Camera Calibrator (在app里面)

双目相机选择这个Stereo Camera Calibrator app
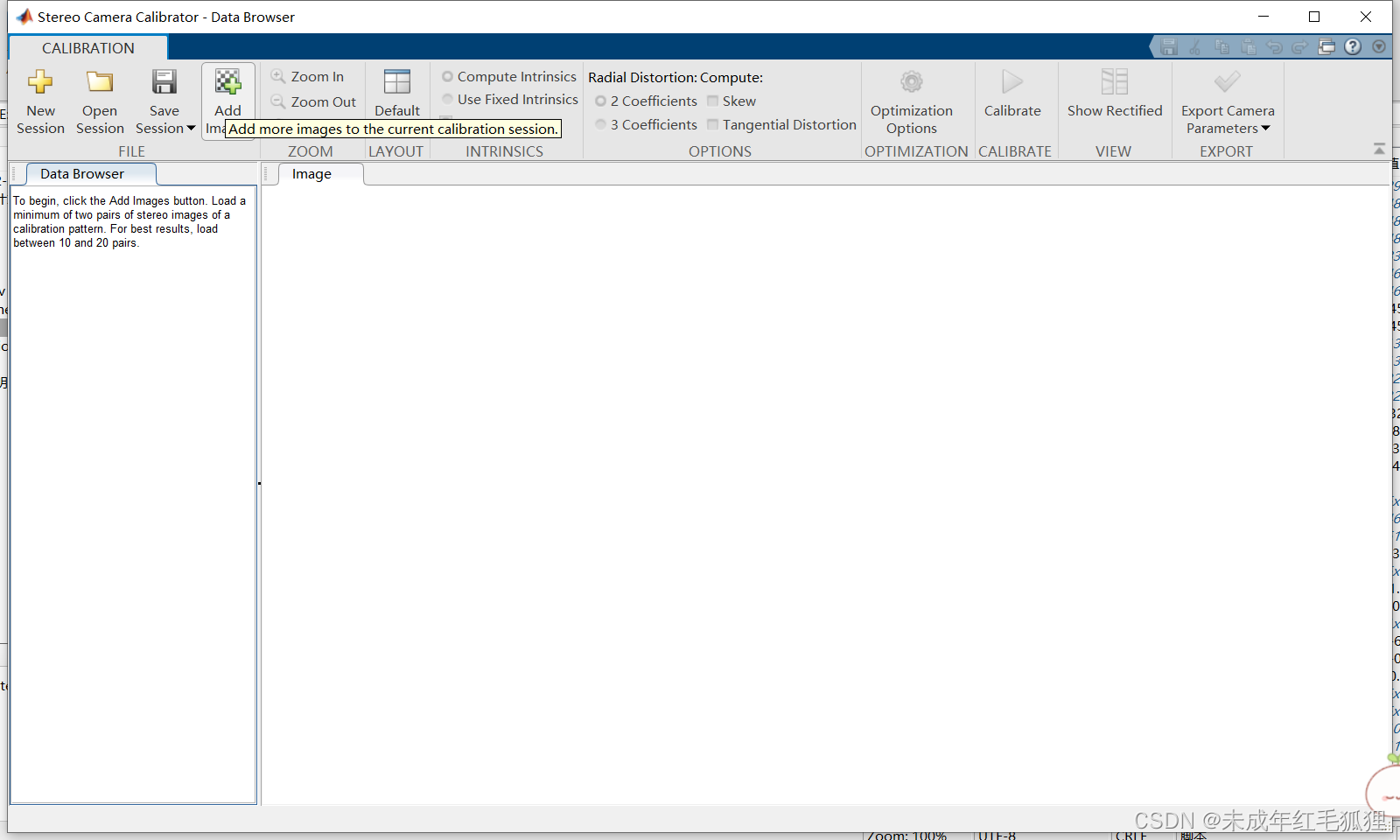
点击Add Images
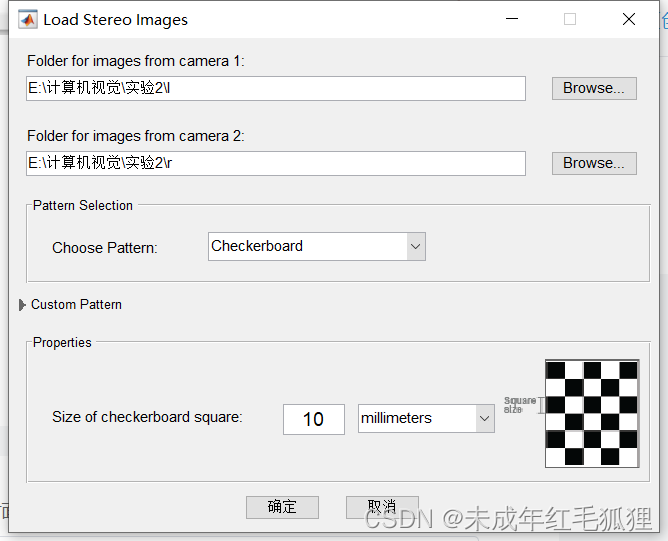
选择相机1和2的图像路径,然后修改下面的棋盘格尺寸(10mm)
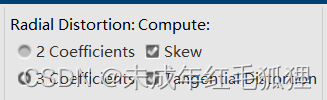
这里勾选3 coefficients(径向畸变会是3阶的),skew(倾斜),tangential distortion(切向畸变)
然后点击绿色箭头calibrate就OK了
结果如下:
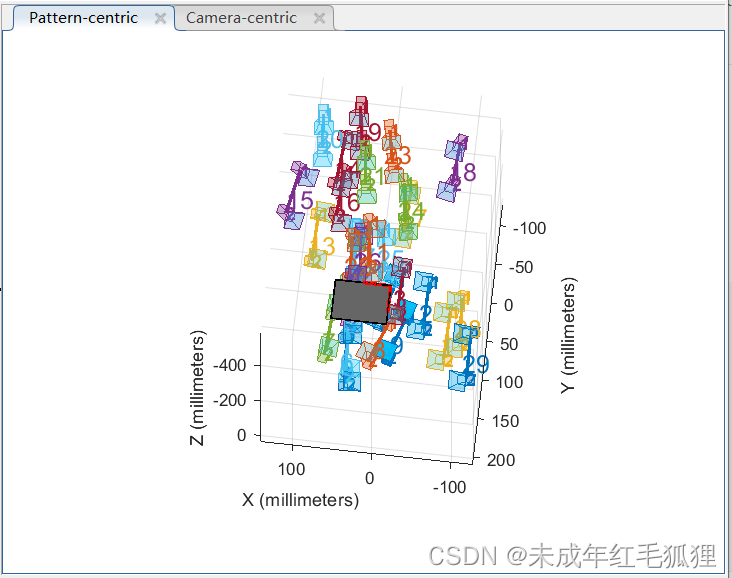
左边那个图是重投影误差(0.5以下就差不多比较好了),右边两个可以用鼠标拖着转一转,camera-centric是他算出来的摄像机和棋盘格拍摄时的相对位置,还有一个叫pattern-centric,意思就是前者认为摄像机不动,后者认为图像平面不动。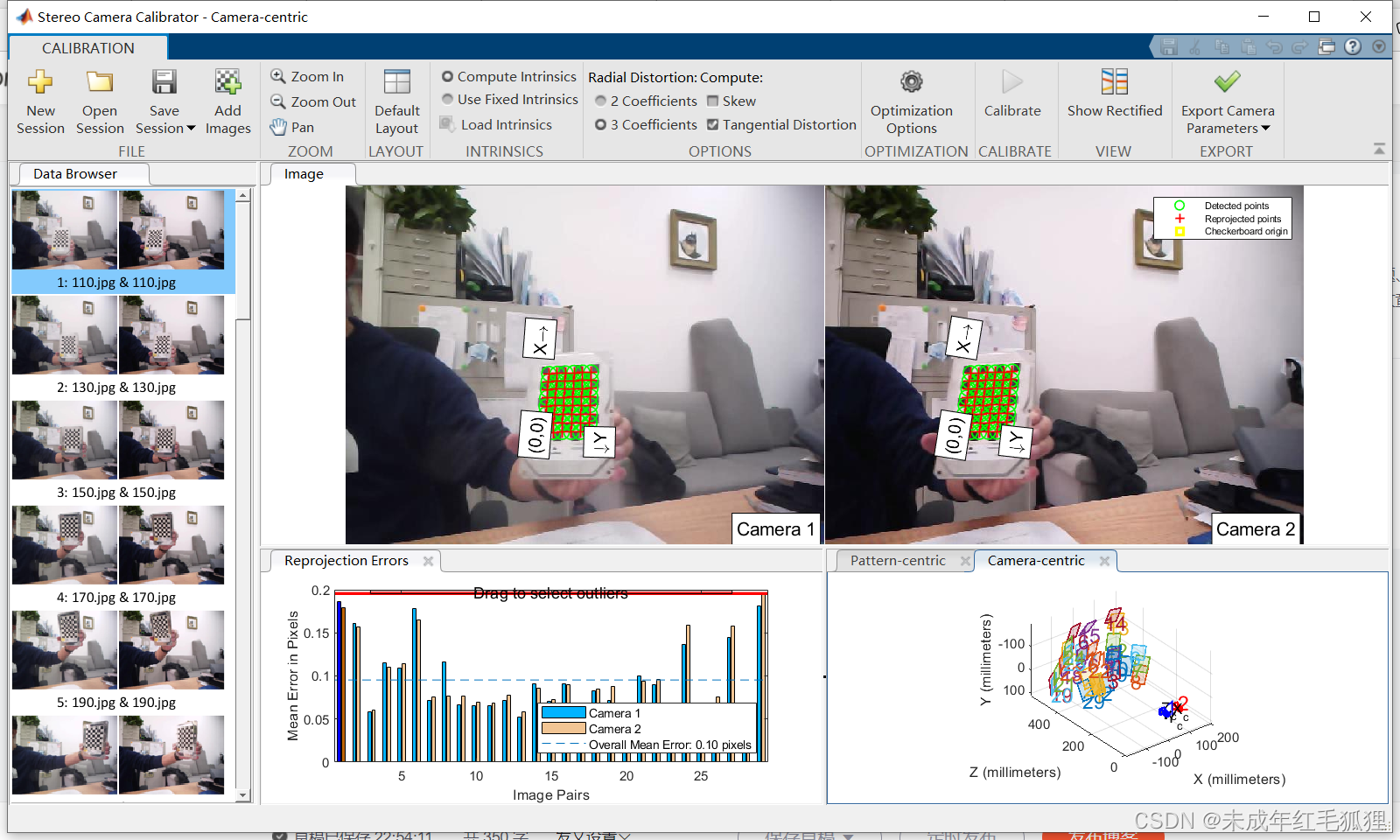
3、导出结果
点击export,可以选择是直接导出到workspace还是生成一个脚本(下一次运行脚本就会产生标定结果了)
4、标定结果
在stereoParameters中查看标定结果。
两个相机的内外参分别在cameraParameters1和cameraParameters2中,其中:
1、相机畸变
RadialDistortion――径向畸变
TangentialDistortion――切向畸变
2、相机内参
IntrinsicMatrix――3*3内参矩阵
2、相机外参
RotationMatrices――3*3*P旋转矩阵(每幅图对应一个)
TranslationVectors?――P*3平移向量(每幅图对应一个)

