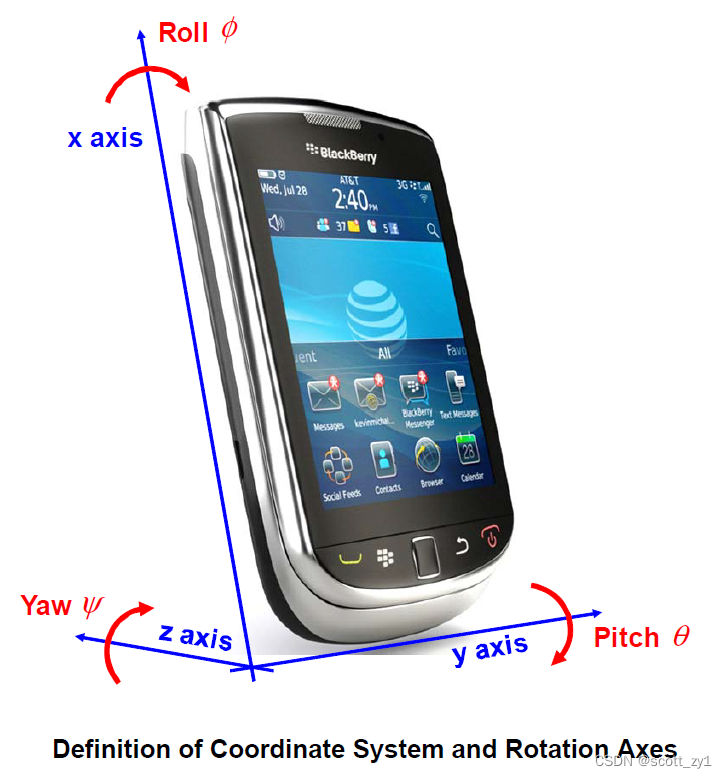
1.倾斜安装示意图
将下图手机屏幕想象为车机屏幕,此时车机倾斜安装对应为IMU倾斜安装
?
2.求解倾斜安装角
定义垂直向下为正方向,与重力的方向一致,水平安装传感器IMU时,对应的三轴加速度测量值:
???????????????????????????????????????????????????????????????
R是定义的旋转矩阵,描述IMU相对于地球坐标系n-frame的姿态方向,在初始状态下,以IMU呈水平安装为基准,初始状态下IMU的z方向向下与重力方向一致,按前右下定义xyz,静态下,则
?????????????????????????????????????????????????????????????????????
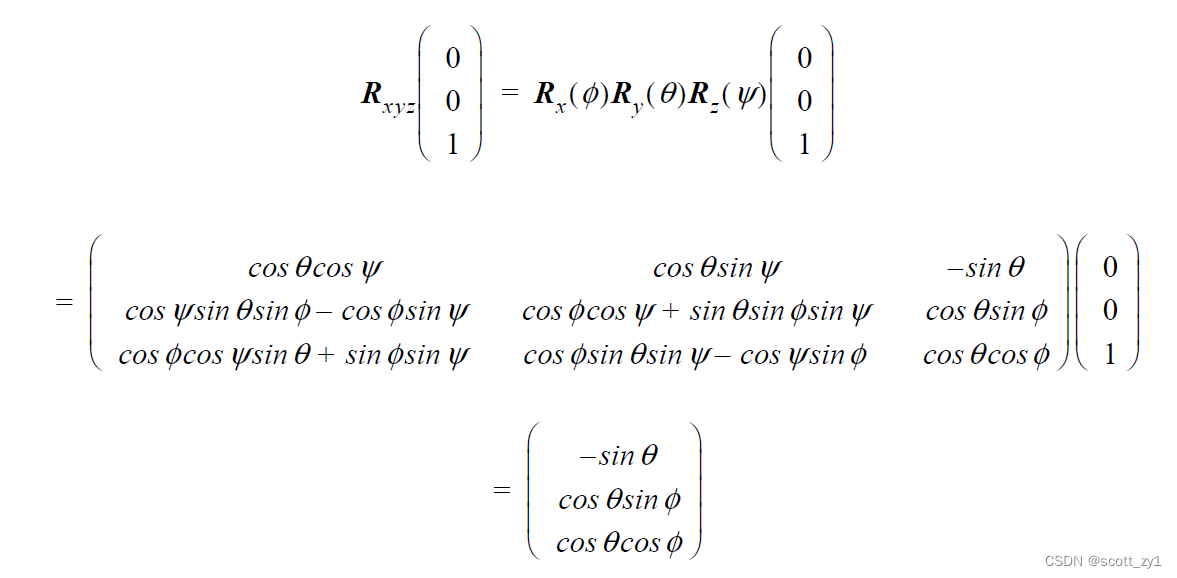
对于车机中IMU(accelerator和gyro)倾斜安装时,基于静态测得的acc三轴数值可求出相应的安装角,旋转顺序 (z→y→x) , 具体如下:
?
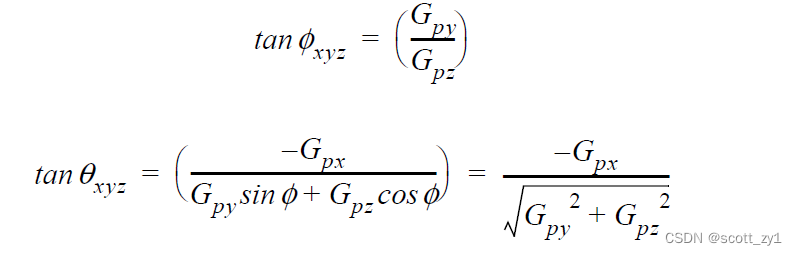
由此求得两个倾斜安装角(另外一个偏航角必须通过GNSS数据得到):
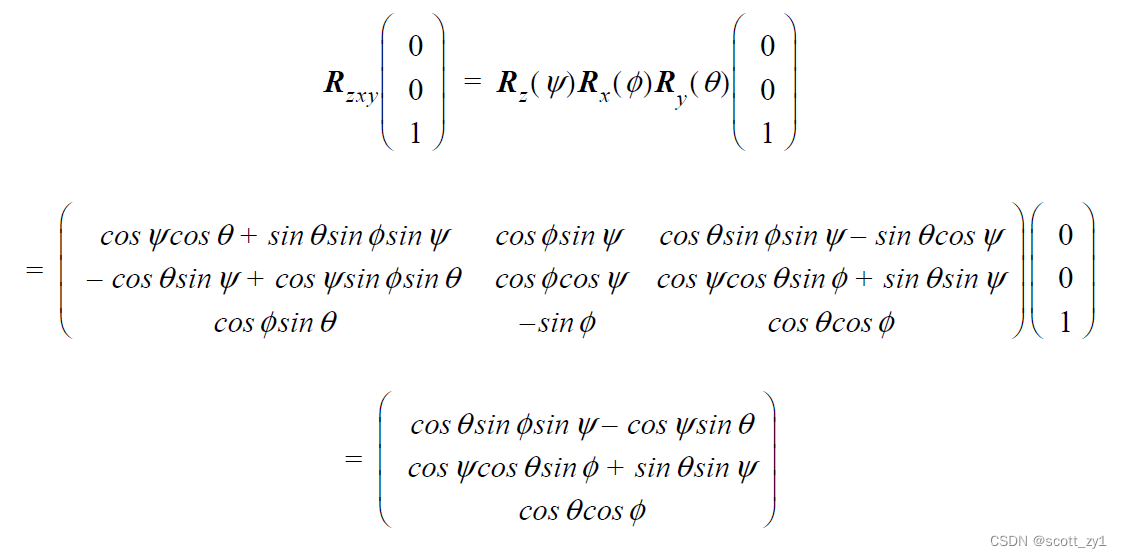
3.其它旋转顺序
旋转顺序 (z →x→y) 可以相应得到:
?
????????
? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ??
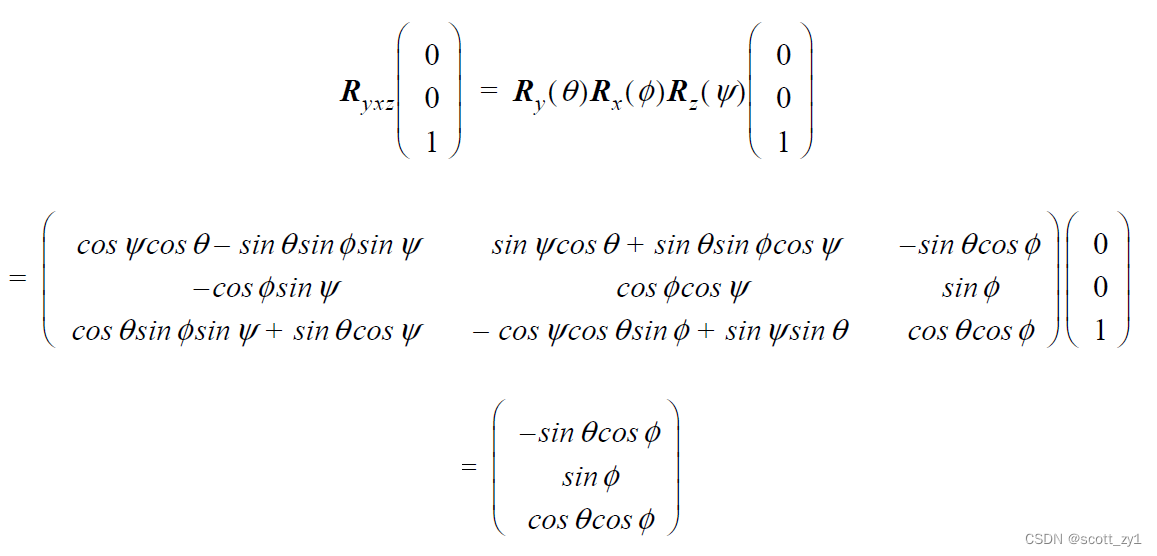
?旋转顺序 (y?→x→z) 可以相应得到:
??旋转顺序 (x→y→z) 可以相应得到
?最终得到的安装角参照上述三角关系式求出。
4.其它说明
对于坐标系旋转后得到的z方向如果是指向地心向上,刚好与重力方向相反,此时定义右前上为xyz方向,则
???????????????????????????????????????????????????????????????????????????????????
其它计算过程与上述相同。

