Raw Data简介

Raw Data 数据地址:http://www.cvlibs.net/datasets/kitti/raw_data.php
原始数据记录,按类别排序(城市、住宅、道路、校园、人、校准)
数据集包含以下信息,以 10 Hz 的频率捕获和同步:
- 原始(
unsynced+unrectified)和处理(synced+rectified)灰度立体序列,由两个灰度相机cam0和cam1采集,对应文件夹image_00和image_01 - 原始(
unsynced+unrectified)和处理(synced+rectified)彩色立体序列,由两个彩色相机cam2和cam3采集,对应文件夹image_02和image_03, Velodyne点云- unsynced+unrectified 数据以txt文件存储
- synced+rectified 数据以bin文件存储)
OXTS (GPS/IMU):3D GPS/IMU 数据(位置、速度、加速度、元信息,存储为文本文件)Calibration:(相机、相机到 GPS/IMU、相机到 Velodyne,存储为文本文件)tracklet:3D 对象轨迹标签(汽车、卡车、电车、行人、骑自行车的人,存储为 xml 文件)
- unsynced+unrectified 是指原始输入帧,其中图像失真且帧索引不对应,,下载数据对应名称为
2011_**_**_drive_0***_extract.zip- synced+rectified 是指处理后的数据,其中图像已被纠正且未失真,并且数据帧编号对应跨所有传感器流,数据对应名称为
2011_**_**_drive_0***_sync.zip。
对于这两种设置,都提供了带有时间戳的文件,大多数人只需要文件的 synced+rectified 版本。
kitti2bag
生成bag
pip install kitti2bag
要是缺依赖包,安装好相应的依赖包,我用的conda环境,相应的依赖包已经安装好了
解压文件按下面方式放置:
2011_09_30
├── 2011_09_30_drive_0016_sync
│ ├── image_00
│ ├── image_01
│ ├── image_02
│ ├── image_03
│ ├── oxts
│ └── velodyne_points
├── calib_cam_to_cam.txt
├── calib_imu_to_velo.txt
└── calib_velo_to_cam.txt
在2011_09_30文件夹的上一级目录,打开终端输入:
kitti2bag -t 2011_09_30 -r 0016 raw_synced

rviz可视化: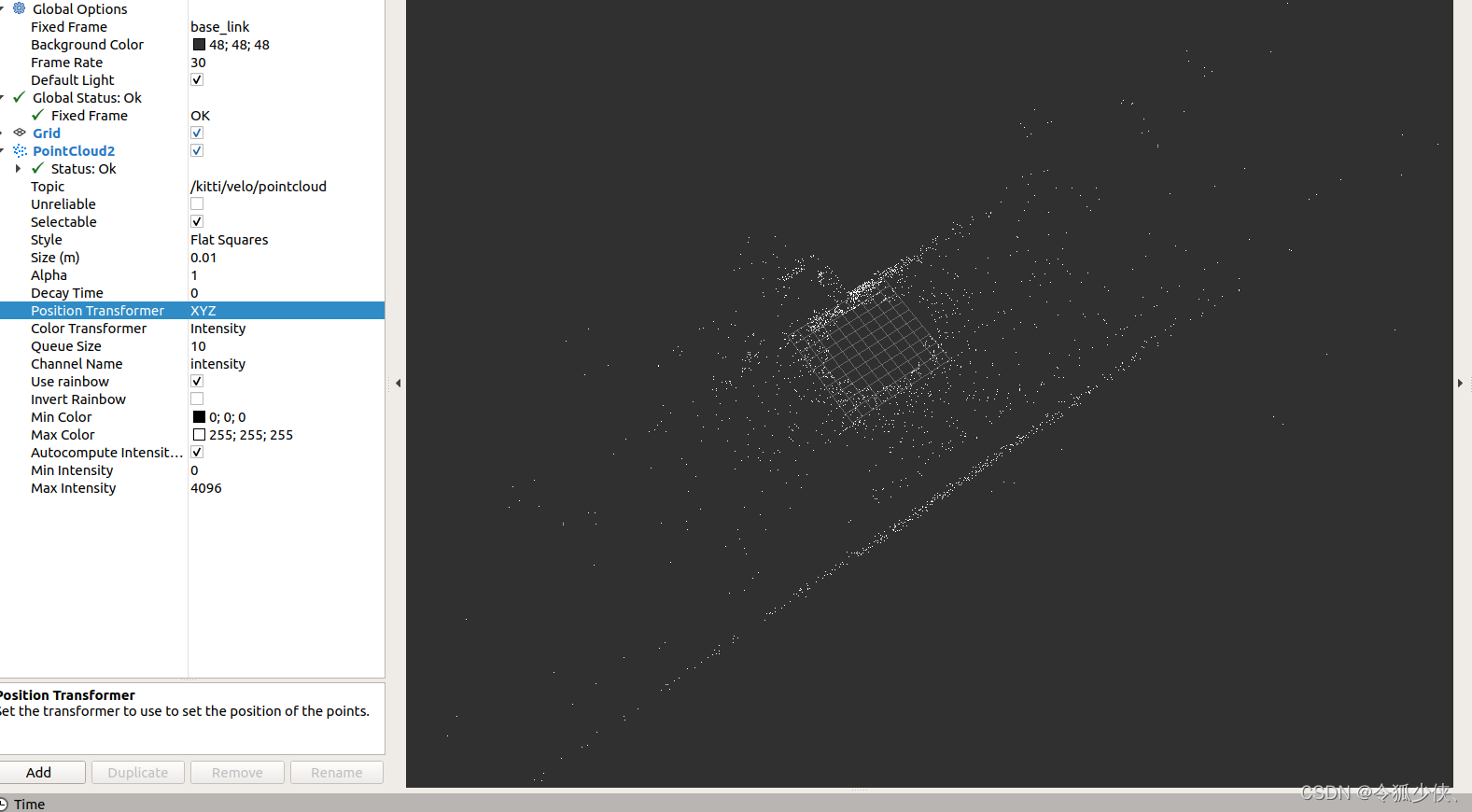 可以看出转化出的bag包缺乏点云强度intensity信息,是由于字段不一致引起的,下面修改kitti2bag代码
可以看出转化出的bag包缺乏点云强度intensity信息,是由于字段不一致引起的,下面修改kitti2bag代码

修改kitti2bag
在终端中输入whereis kitti2bag找到该文件的路径。
whereis kitti2bag

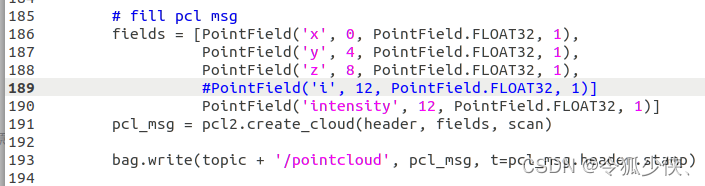
修改kitti2bag,对应189行代码:
gedit /home/xiaohu/.local/bin/kitti2bag
修改后,重新转换bag文件,rviz显示


