�ȷ�һ���㷨����ͼ:
������2022.05.05��δreleased.
Abstract
��ע��:�������ɻ���������չ������B. Yan, H. Zhao, D. Wang, H. Lu, and X. Yang, ����Skimming-perusal�� tracking: A framework for real-time and robust long-term tracking,�� in Proceedings of the IEEE International Conference on Computer Vision, 2019, pp. 2385�C2393.
��ʱ���ٱ���:��ʱ����ͨ����Ҫ�����㷨��һ���ֲ���������Ŀ�겢������ͼ�����ؼ��Ŀ��,��ǰ������û����ص��о�������
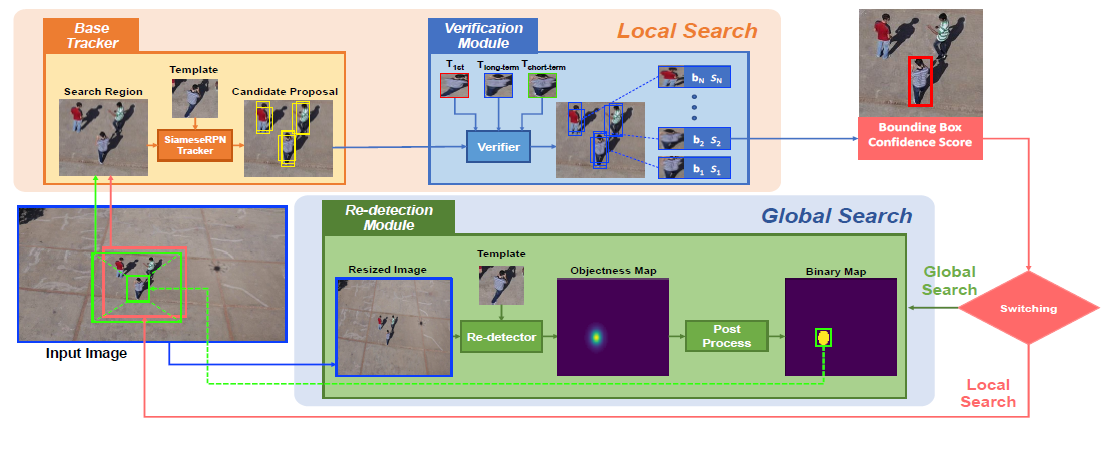
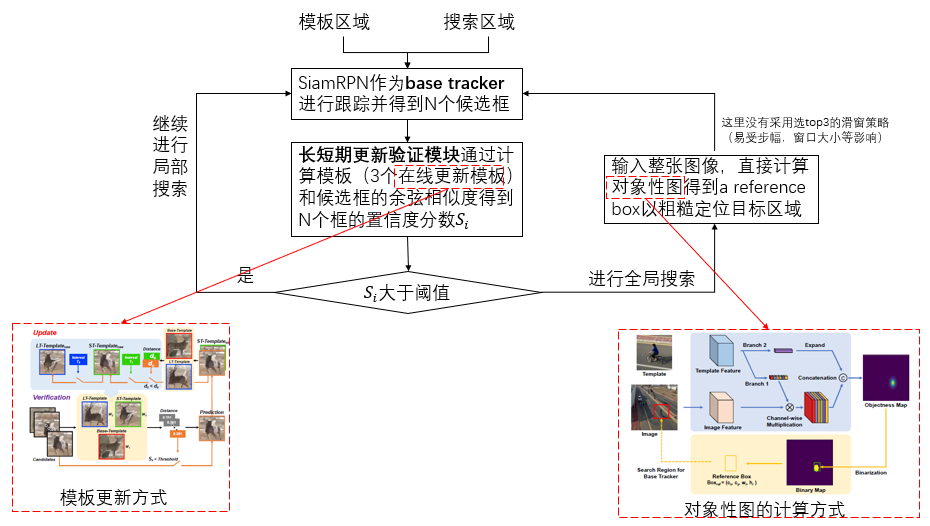
��������:���������һ�����ھֲ�����ģ����ؼ��ģ���³��ʵʱ�ij�ʱ���ٿ�ܡ��ֲ�����ģ������һ��Ŀ���ع���ȥ�����ڶ��ѡ������һ��Ŀ����֤��ȥ�������Ŷȷ����������ź�ѡ������,�������һ������ʱ���²���ͨ��ʹ�ò�ͬʱ����µĶ��ģ��������Ŀ����֤��������,�������Ŷȷ����Ϳ����жϸ��ٶ����Ƿ�����ڻ�����,�ɴ�����һ֡�зֱ�ѡ��ֲ���ȫ�ֵĸ��ٲ��ԡ�ȫ���ؼ��ģ�����Թ���Ŀ��λ�ú�Ŀ��ߴ�,���ڶ�ʵ����֤�˸�ģ���������Ƕ��������ٿ�������������ڸ��ٵ����ܡ�
��������:��VOT, OxUvA, TLP, LaSOT�Ͻ�������,���㷨��ʵʱ���ٶȴﵽ��������������ܡ�
1. Introduction
Ŀ����ٱ������ѵ����:Ŀ�������CV�е�һ���������,�ڼ��,������,��ǿ��ʵ�����˻������������ڶ�Ӧ�á������ٹ�����,������Ҫ��һ����������Ƶ֡�и���һ������Ŀ�ꡣȻ��,��������������ڶ����,�����ڵ�,���ձ任,�ӵ�仯����ת���˶�ģ���ȡ�
��ʱ�������ݼ�:VOT2018-LT, OxUvA, trackers��
��ʱ���������ص�:1. ������ǧ֡�ĸ��١���VOT2017��60����Ƶ��ƽ��������356֡,VOT2018-LT��35����Ƶ��ƽ��������4100֡;2. Ŀ���Ƶ����ʧ����VOT2018-LT�е�ÿ����Ƶƽ��ÿ����Ƶ��Ŀ�����ʧ12��,��UAV20L��ƽ����ʧ������2��
��ʱ�����㷨:�����ֹ������ij�ʱ�����㷨:TLD, LCT, FuCoLoT, MUSTer, CMT, EBT��,��Ч�����á�������������ij�ʱ�����㷨����������,����û��һ��³����ʵʱ�Ŀ�ܡ�
Ϊʲô���ڸ����㷨�Գ��ڸ���û��?:���ڸ���ʱ,Ŀ����ܻ���ʧһ����ʱ�䲢������ߴ�������λ�����³���,��Υ���˶��ڸ�����Ŀ���ƶ������ҳ߶ȱ仯�����ļ��衣ͨ����˵,һ�����ڸ�������һ���ֲ����������ڶ�λĿ��,���������������ǰһ֡Ŀ��λ�ø����ü�����,Ҳ����˵,�ֲ�����������ǰһ֡Ԥ���Ŀ��λ�á����,���ڸ����㷨�ڳ�ʱ�����е����ܲ��ѡ�
������һЩ�����㷨���ϴ����ؼ��Ķ��ڸ�����,��������ͼ��������,��������Ȼ�ܵ�����ȷ�ߴ�״̬������,����һЩ����Ҫ���Ӷ�߶��������ԡ�
������:
| ���� | ����/���� |
|---|---|
| 1. �ֲ�-ȫ��������� | �ֲ���ȫ������ģ�鶼������ѵ����ֱ�����ڸ��ٽΡ��ֲ���������ָ��Ŀ���ع鲢��֤;�ؼ�⡪��������ͼ�����ؼ����ٶ�λĿ�� |
| 2. �ؼ��ģ�� | ����ѵ��,�����غͶ��ڸ�������� |
| 3. �����ڸ�����֤�� | ��ǿ�ֲ�����,������2�������ģ���һ�������ڸ��²��� |
1.1 Related Work
һ�����͵ij��ڸ���������a tracking component��a re-detection component��
| Tracking Component in Long-Term Tracker | Re-detection Component in Long-Term Tracker |
|---|---|
| 1. TLD:����ƥ���㷨;����˲����:Ma������KCFִ�оֲ����ڸ���;CSRDCF��Ϊ��������һ���ֲ����������ڶ�λĿ��;MUSTer��KCF��DSSTִ�б任���ƺͳ߶ȹ���;PTAV;2. ��ȵķ���:Valmadre��SiamFC��Ϊ�ؼ��ģ��;DaSiam_LT����DaSiamRPN�Ͷ�߶�����;Zhang���� ��MDNet��Ϊ��֤��ȥ�ලsiamese������ | 1. CMT,MUSTerʹ�ô�ͳ�Ĺؼ���ƥ�����ڼ��Ŀ��;2. FuCoLoT������˲�����Ŀ��λ��;SiamFC+R������������ѵ������ͼ���ĵ㡣3. ����������ķ������������ڱ��㷺Ӧ�����ؼ��Ρ� |
�������a skimming module�Լ��ٻ�����������,���ϰٸ����������г�ʼ��ѡ�����ܵ���������,Ȼ����һ�������������������Щ���������¼��Ŀ�ꡣ�����һ��offline trained re-detection module,���ؼ���,ֱ��������ͼ���Ϲ���Ŀ��λ�úͳߴ硣
2. Methods
�㷨��������ͼ:
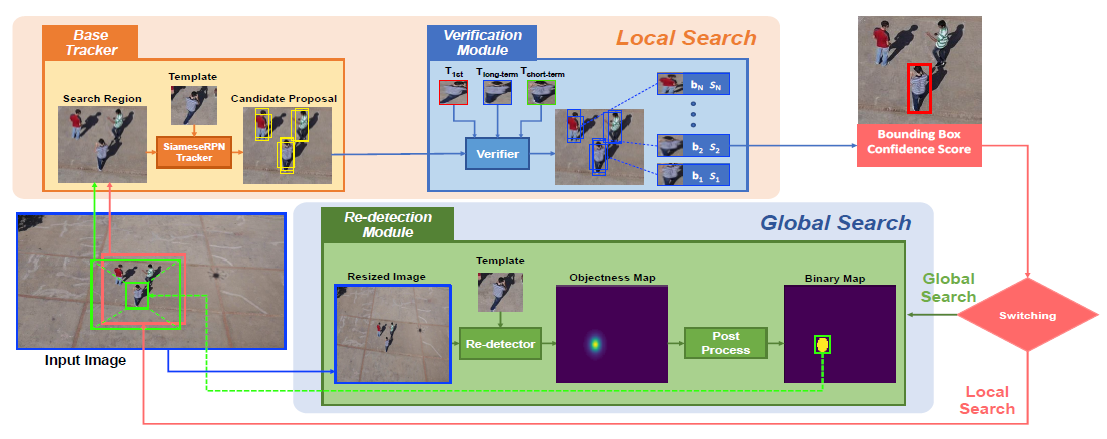
������˵,���ֲ������㷨����Ŀ�������Ŷȷ�������һ����ֵ,�ͼ���ִ�оֲ�����;����,����һ��������ͼ�ֲڶ�λ�µ�Ŀ������,�����þֲ������㷨�������Ŀ����
2.5 Implementation Details
| ���� | �������� |
|---|---|
| base tracker | SiamRPN++ |
| Backbone | MobileNetV2 for SiamRPN++, ResNet18 for��֤ģ����ؼ��ģ�� |
| ��֤ģ�� | ʹ��ȫ���Ӳ㽫����ͼ�Ŀռ�ֱ��ʴӿ� 3 �Ϳ� 4 �²�����1x1,��������������������������֤ |
| �ؼ��ģ�� | 2����֧����һ��ȫ��ƽ���ػ���1x1����,ʹ��1x1������ 3x3 �������ں�����ͼ��ͨ��ά�ȴ�1024 ���ٵ� 256�� Ȼ��������ת�þ���(4 4,strides 2)��Ԥ�������ͼ�� |
| ѵ���� | SiamRPN++��COCO, ImageNet DET/VID, YouTube-BB��ѵ��; ��֤���ؼ��ģ����LaSOT��ѵ�� |
3. Experiments
NVIDIA RTX2080Ti GPU, 35fps
- Ours: �������߸�����֤�Ͷ������ؼ����
- SPLT:����������֤����skimming(����)ģ��
3.1 Results on the VOT2018/2019-LT Datasets
��ʱ��������ָ��
- tracking precision (TP):����Ŀ�����ʱ��Ԥ�⾫��
- tracking recall (TR):����Ŀ���ؼ�������
- tracking F-score (F):


