卷积的计算流程

- N 是 batch_size
- C 是 channel,就是输入的维度,我们也可以认为是层数
- H 是一层 map 的高
- W 是一层 map 的宽
通俗点说,输出的每一层由一个卷积核负责,这个卷积核对输入的所有特征值进行卷积操作(对应位置点乘再相加),并求和
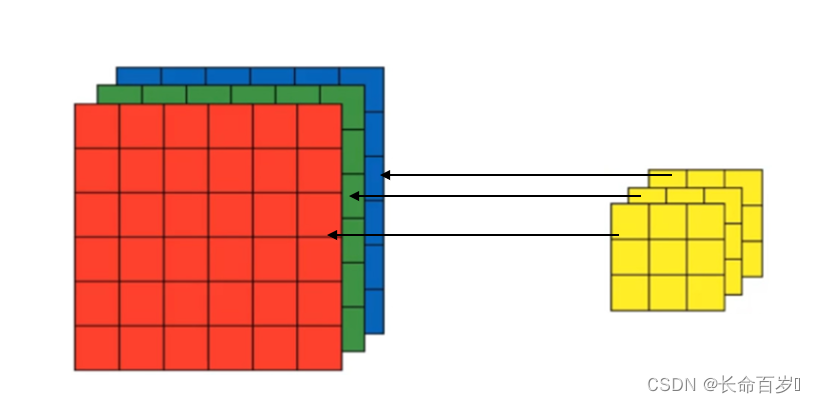
计算方式如下图所示:

- 因为 N 是 batch,所以输入和输出的 N 是对应的,我们可以不用关注
- w e i g h t ( C o u t j , k ) weight(C_{outj}, k) weight(Coutj?,k) 就代表得到第 c o u t j c_{outj} coutj? 层map 时在输入的第 k 层上使用的卷积核,就是上图中的蓝色小方块
- i n p u t ( N i , k ) input(N_i,k) input(Ni?,k) 对应的就是输入的第 k 个 map
- 求和就是遍历所有输入的 feature map,从 0 到 C i ? 1 C_i - 1 Ci??1,一共 C i C_i Ci? 个,就是输入的 map 的层数
- 我们固定 C o u t j C_{outj} Coutj?,通过滑动蓝色小方块,我们进行上面的操作,就能得到一层输出 map,就是蓝色大方块
- 如果输入维度是 1,卷积过程如下所示

这里输入维度是3,卷积过程如下所示,一个卷积核是三个黄色块,一个黄色块对一个维度进行卷积,三个黄色块是不一样的。一个卷积核的参数量为 3*3*3 + 1(bias)
之后更换卷积核,不断变化
C
o
u
t
j
C_{outj}
Coutj? ,我们就能得到红色大方块(下一个输出的 map),之后的一系列同理

一个卷积核的维度是 kernel_size[0] * kernel_size[1] * 输入维度,输出的维度等于卷积核的个数,每个卷积核负责输出一个维度
常用参数介绍
in_channels(int):输入图像的通道数,上面的例子中,in_channels = 3out_channels(int):输出的通道数kernel_size(int / tuple):卷积核的大小,就是上面蓝色和红色小方块的大小stride(int / tuple, optional):步长,就是卷积核一次移动几个像素(默认是 1)padding(int / tuple / str, optional):对四个方向都加 pad,默认是 0padding_mode(str, optional):'zeros','reflect','replicate'or'circular'. Default:zerosbias(bool, optional):默认为True,为输出增加可学习的偏置项
输入输出的尺寸

-
我们一般都默认,dilation = 1,因此,更直观的是
$H_{out} = \frac{H_{in} + 2*padding[0]-kernel_size[0]}{stride[0]} + 1 \$
$W_{out} = \frac{W_{in} + 2*padding[1]-kernel_size[1]}{stride[1]} + 1\$
最好保证 H o u t H_{out} Hout? 和 W o u t W_{out} Wout? 都是整数
代码
m = nn.Conv2d(1, 1, 15, 1, 7) # in_chan, out_chan, kernel_size, stride, padding
x = m(x) # x 是输入

