ЫЕУї: МђвЊМЧТМвЛЯТЫйЬк16ЯпМЄЙтРзДяМДRS-16дкubuntu18.04ЯЕЭГЯТХмSC-A-LOAMЫуЗЈЕФЙ§ГЬ,вђЮЊSC-A-LOAMЫуЗЈдДТыВЛжЇГжRSРзДяЕФЪ§Он,ДѓжТЫМЯыОЭЪЧЯШНЋrsРзДяЗЂВМЕФМЄЙтЪ§ОнзЊЛЛЮЊvelodyneРраЭЕФЪ§Он,ПМТЧЕННгЯТРДЛЙвЊЛљгкRS-16ЪЕЪБдЫааSC-A-LOAMЫуЗЈ,етРяЬсЧАНЋRS_SDKЧ§ЖЏАВзАКУЁЃ
1 ДюНЈSC-A-LOAMЫуЗЈдЫааЛЗОГ
ЪзЯШашвЊдкЕчФдЩЯДюНЈSC-A-LOAMЫуЗЈЕФдЫааЛЗОГ,МћЮФеТЁЖubuntu18.04ДюНЈSC-A-LOAMЛЗОГВЂдЫааЁЗ
БОЮФЫљЪЙгУЕФЯЕЭГМмЙЙЪЧx86,ARMМмЙЙгаЛњЛсдйНјааећРэ
2 ХфжУМЄЙтРзДяSDKКЭЕудЦзЊЛЛЙЄОп
ОпЬхПЩвдВЮПМЙйЗНgithubЩЯЕФЫЕУї:
https://github.com/RoboSense-LiDAR/rslidar_sdk/blob/release/README_CN.md
2.1 rslidar_sdkШэМўЧ§ЖЏЯрЙизМБИ
- ЯТдиЧ§ЖЏ
#ДДНЈrs_sdkЕФЙЄзїПеМф
mkdir -p rs_catkin_ws/src
cd rs_catkin_ws/src
# ЯТдидДТы
git clone https://github.com/RoboSense-LiDAR/rslidar_sdk.git
cd rslidar_sdk
git submodule init
git submodule update
- АВзАrslidar_sdkЯрЙивРРЕ
# yaml АВзА
sudo apt-get update
sudo apt-get install -y libyaml-cpp-dev
# pcapАВзА
sudo apt-get install -y libpcap-dev
# protobuf
sudo apt-get install -y libprotobuf-dev protobuf-compiler
- catkinБрвыЛЗОГзМБИ
(1)ДђПЊЙЄГЬФкЕФCMakeLists.txtЮФМў,НЋЮФМўЖЅВПЕФset(COMPILE_METHOD ORIGINAL)ИФЮЊset(COMPILE_METHOD CATKIN)ЁЃ
#=======================================
# Compile setup (ORIGINAL,CATKIN,COLCON)
#=======================================
set(COMPILE_METHOD CATKIN)
(2)НЋrslidar_sdkЙЄГЬФПТМЯТЕФpackage_ros1.xmlЮФМўИДжЦЕНЭЌФПТМ,ИФУћЮЊpackage.xml
(3)аоИФМЄЙтРзДяЧ§ЖЏЕФCMakeLists.txt
#=======================================
# Custom Point Type (XYZI, XYZIRT)
#=======================================
set(POINT_TYPE XYZIRT)
2.2 ЕудЦзЊЛЛЙЄОпЯТди
- НЋЕудЦзЊЛЛЙЄОпЕФдДТыЯТдиЕНrslidar_sdkЕФЭЌМЖФПТМЯТ
git clone https://github.com/HViktorTsoi/rs_to_velodyne.git
2. ДДНЈЛАЬтзЊЛЛдДТыЕФlaunchЮФМў
дк/src/rs_to_velodyne-masterЯТНЈСЂУћЮЊlaunchЕФЮФМўМа,ВЂдкИУЮФМўМаЯТаТНЈlaunchЮФМўЁЃ
touch rstovelodyne.launch
ДђПЊlaunchЮФМў,ЪфШывдЯТФкШнВЂБЃДцЁЃвВПЩвдИљОнЪЙгУЧщПіНЋЦфМЏГЩЕНЦфЫћlaunchЮФМўжаЁЃ
<launch>
<node pkg="rs_to_velodyne" name="rs_to_velodyne" type="rs_to_velodyne" args="XYZIRT" output="screen">
</node>
</launch>
2.3 БрвыЙЄзїПеМф
дкrslidar_wsФПТМЯТДђПЊвЛИіжеЖЫ
catkin_make
# ЬэМгЛЗОГБфСП
echo "source YOUR_PATH/rslidar_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
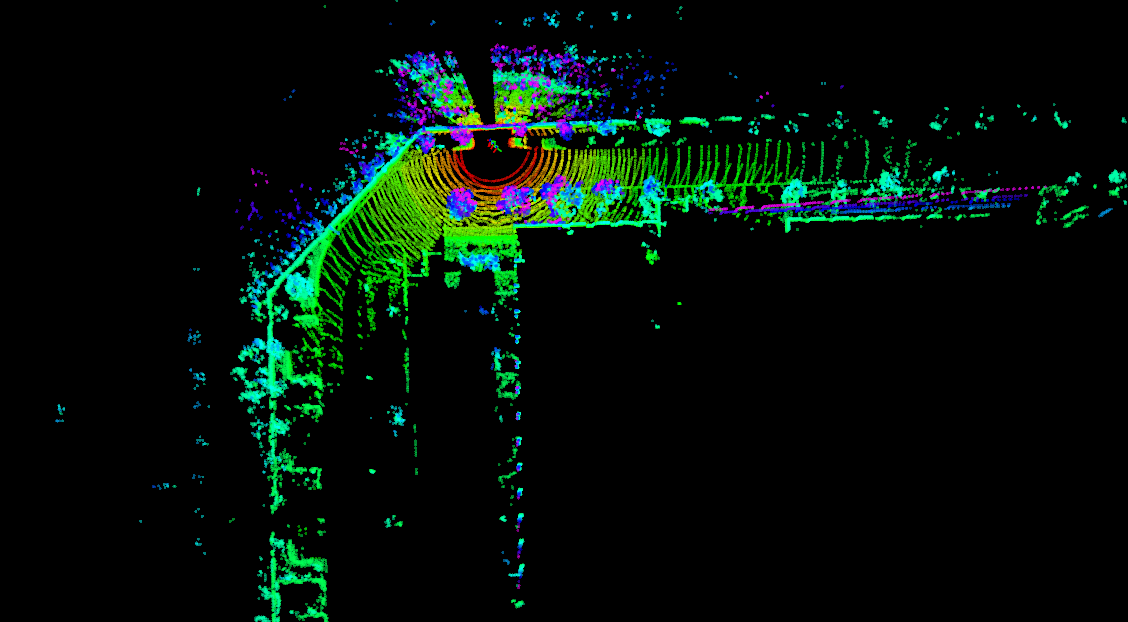
3 ЪЙгУRS-16Ъ§ОнХмSC-A-LOAMЫуЗЈ
- ЦєЖЏSC-A-LOAMГЬађ
roslaunch aloam_velodyne aloam_velodyne_VLP_16.launch
- ЦєЖЏМЄЙтЪ§ОнзЊЛЛГЬађ
rosrun rs_to_velodyne rs_to_velodyne XYZIRT XYZI

- ВЅЗХЪ§ОнМЏ
rosbag play data/rs80.bag
4. ЖдБШЯТжБНгХмvelodyneЪ§ОнМЏКЭrsЪ§ОнМЏЪБЕФНкЕуаХЯЂ
Хмnsh_indoor_outdoor.bagЪ§ОнМЏ

Хмrs.bag


