1.介绍
- 基于图像的3D重建的目标可以描述为:
given a set of photographs of an object or a scene, estimate the most likely 3D shape that explains those photographs, under the assumptions of known materials, viewpoints, and lighting conditions
该定义强调了任务的难度:materials, viewpoints, and lighting conditions。如果不知道这些,则问题通常是不适定的,因为多种组合可以产生完全相同的照片。
- 流程:
? Collect images,????????收集图像
? Compute camera parameters for each image,????????每个图像计算相机参数
? Reconstruct the 3D geometry of the scene from the set of images and corresponding camera parameters.????????从一组图像和相应的相机参数重建场景的 3D 几何。
? Optionally reconstruct the materials of the scene。????????可选择重建场景的材质(纹理贴图巴拉巴拉)

1.1.图像收集
- 本教程专注于 SfM 算法,因为绝大多数 MVS 算法旨在处理无序图像集,并依赖 SfM 来计算相机参数。
- 相机参数
The term “camera parameters” refers to a set of values describing a camera configuration, that is, camera pose information consisting of location and orientation, and camera intrinsic properties such as focal length and pixel sensor size.
相机位姿信息包括位置和方向,以及相机固有属性,例如焦距和像素传感器尺寸。
1.2.相机投影模型?
In particular, MVS algorithms require that every input image has a corresponding camera model that fully describes how to project a 3D point in the world into a 2D pixel location in a particular image.
相机模型将3D点投影到2D像素上:世界坐标到像素坐标
1.常用针孔模型:
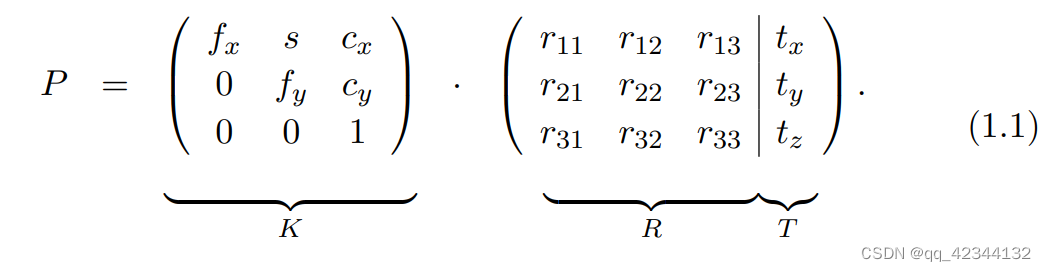
?2.参数分析
| K :内参矩阵3x4(5自由度) | fx,fy : 垂直和竖直方向的焦距 |
| R :旋转矩阵(3自由度) | cx,cy : 像平面的中心坐标 |
| T : 平移矩阵(3自由度) | s : 相机倾斜角度相关 |
总共11个自由度。特别地,假定像素没有偏斜 (s = 0),并且是正方形 (fx = fy)。且如果图像没有裁剪过,像平面的中心坐标在图像中心。此时模型只有7个自由度(R(3个),T(3个),f)。
3.考虑径向畸变
?如果附加的透镜是低质量的,或广角的,纯针孔模型是不够的,经常扩展径向畸变模型。
Radial distortion can typically be removed from the photographs before they enter the MVS pipeline.
To avoid these issues MVS pipelines can support radial distortion and more complicated camera models directly, at the expense of extra complexity.

